一种基于正交三角分解的光照不变特征提取方法
1.本发明属于模式识别技术领域,具体的说是一种基于正交三角分解的光照不变特征提取方法。
背景技术:
2.光照不变特征提取技术主要应用于存在剧烈光照变化的人脸图像识别问题中,其在视觉监控,信息安全,身份信息识别等领域有着广泛的应用需求,如在视觉监控方面,目前的户外视觉监控系统可实时采集大量含有剧烈光照变化人脸图像的视频和图片,通过提取光照不变特征,可以提高视觉监控系统识别剧烈光照变化人脸图像的准确率,能够对可疑份子实施及时抓捕或实时定位。现有技术中已公开有相关技术,如:申请公布号为cn106991369a公开了一种基于平滑滤波的人脸光照不变特征提取方法,其利用平滑滤波对人脸图像进行处理与原图像对应像素进行除法运算,消除慢变化的人脸光照部分,所得结果就是需要提取的人脸光照不变特征,其对阴影部位的处理效果差。
3.基于正交三角分解的光照不变特征提取方法是一种削弱人脸图像的剧烈光照影响的技术,由正交三角分解算法,获得图像局部邻域的上三角矩阵的对角线元素,并对其进行非线性放大,以放大后的对角线元素构建光照不变特征,能够显著提高人脸识别系统在剧烈光照变化下的识别准确率。
4.一直以来,复杂光照条件下的人脸识别是模式识别领域的一个重要课题,科研人员提出并发展了许多有显著意义和应用价值的方法。按其技术特点可以分为两类:基于数据驱动的复原方法和基于模型驱动的复原方法。基于数据驱动的复原方法使用大规模光照变化人脸图像训练深度神经网络,使得深度神经网络能够产生任意剧烈光照变化人脸图像的正常光照图像,基于数据驱动的复原方法容易造成人脸鉴别信息失真,对剧烈光照变化效果不佳,在实际应用中不能令人满意。基于模型驱动的复原方法,将剧烈光照变化作为线性干扰噪声消除掉,效果很好。基于正交三角分解的光照不变特征提取方法,具有较快的速度,识别准确率高,但是其算法效率还可以进一步提高。
技术实现要素:
5.为了解决上述问题,本发明提供了一种能够恢复人脸结构的识别准确率高的基于正交三角分解的光照不变特征提取方法。
6.为了达到上述目的,本发明是通过以下技术方案来实现的:
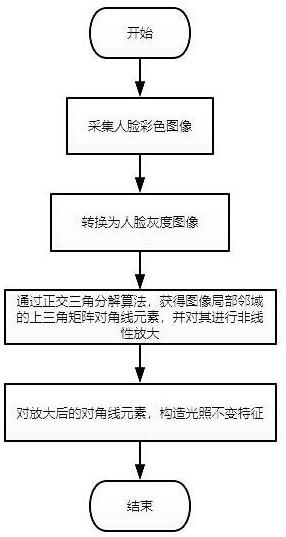
7.本发明是一种基于正交三角分解的光照不变特征提取方法,包括如下步骤:
8.步骤1:采集人脸彩色图像,并转化为人脸灰度图像;
9.步骤2:通过正交三角分解算法,获得3
×
3局部邻域的上三角矩阵对角线元素,并对其进行非线性放大;
10.步骤3:对步骤2获得的非线性放大后的上三角矩阵对角线元素,构造光照不变特征。
11.本发明的进一步改进在于:步骤1的具体操作步骤如下:
12.步骤1.1:采集人脸彩色图像,人脸彩色图像的大小为h
×
w
×
3,其中h表示人脸彩色图像矩阵的行数,w表示人脸彩色图像矩阵的列数;
13.步骤1.2:将所述步骤1.1中的人脸彩色图像转化为大小为h
×
w的人脸灰度图像i,并将人脸灰度图像i的灰度值等比例的转化到1到255之间。
14.本发明的进一步改进在于:步骤2的具体操作步骤如下:
15.步骤2.1:依照从左到右、从上到下的顺序,在每一块大小为3
×
3的局部邻域内,进行正交三角分解,得到正交三角分解式如下:
16.i(x,y)=qrp
ꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
17.其中(x,y)为局部邻域的中心像素坐标,q为局部邻域i(x,y)分解得到的正交矩阵,其大小为3
×
3;r为局部邻域i(x,y)分解得到的三角矩阵,其大小为3
×
3,上三角矩阵r的第i个对角元素表示为r
i
,i=1,2,3;p为置换矩阵,其大小为3
×
3;
18.步骤2.2:将所述步骤2.1中得到的上三角矩阵r的第i个对角元素进行非线性放大,即
[0019][0020]
本发明的进一步改进在于:步骤3中将步骤2.2得到的修正的对角元素代入下式:
[0021][0022]
并将qi(x,y)等比例的转化到1到255之间,得到光照不变特征。
[0023]
本发明的有益效果是:本发明的方法在光照不变特征提取的速度和稳定性方面优于传统的方法,对于提高人脸识别系统在剧烈光照变化下的识别准确率具有重要价值。
[0024]
本发明的方法针对人脸图像的剧烈光照变化,利用正交三角分解算法,获得图像局部邻域的上三角矩阵的对角线元素,并对其进行非线性放大,以放大后的对角线元素构建光照不变特征,本方法可显著的提高人脸识别系统在剧烈光照变化下识别的准确率。该方法对光照变化的鲁棒性强,尤其是能有效消除阴影边缘的影响。本发明从实际应用效果出发,提出基于正交三角分解的光照不变特征提取方法,且其处理效率高,计算方法简单。
附图说明
[0025]
图1为本发明方法整体流程图。
具体实施方式
[0026]
以下将以图式揭露本发明的实施方式,为明确说明起见,许多实务上的细节将在以下叙述中一并说明。然而,应了解到,这些实务上的细节不应用以限制本发明。也就是说,在本发明的部分实施方式中,这些实务上的细节是非必要的。
[0027]
下面结合附图对本发明的技术方案做进一步的详细说明:
[0028]
如图1所示,本发明是一种基于正交三角分解的光照不变特征提取方法,其流程图如图1所示,具体按照以下步骤进行:
[0029]
步骤1:采集人脸彩色图像,并转化为人脸灰度图像,具体流程如下:
[0030]
步骤1.1:采集人脸彩色图像,人脸彩色图像的大小为h
×
w
×
3,其中h表示人脸彩色图像矩阵的行数,w表示人脸彩色图像矩阵的列数;
[0031]
步骤1.2:将所述步骤1.1中的人脸彩色图像转化为大小为h
×
w的人脸灰度图像i,并将人脸灰度图像i的灰度值等比例的转化到1到255之间;
[0032]
步骤2:通过正交三角分解算法,获得3
×
3局部邻域的上三角矩阵对角线元素,并对其进行非线性放大,具体流程如下:
[0033]
步骤2.1:依照从左到右、从上到下的顺序,在每一块大小为3
×
3的局部邻域内,进行正交三角分解,得到正交三角分解式如下:
[0034]
i(x,y)=qrp
ꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0035]
其中(x,y)为局部邻域的中心像素坐标,q为局部邻域i(x,y)分解得到的正交矩阵,其大小为3
×
3;r为局部邻域i(x,y)分解得到的三角矩阵,其大小为3
×
3,上三角矩阵r的第i个对角元素表示为r
i
,i=1,2,3;p为置换矩阵,其大小为3
×
3;
[0036]
步骤2.2:将所述步骤2.1中得到的上三角矩阵r的第i个对角元素进行非线性放大,得到修正的对角元素,即
[0037][0038]
步骤3:对步骤(2)获得的非线性放大后的上三角矩阵对角线元素,构造光照不变特征,具体流程如下:
[0039]
步骤3.1:将所述步骤2.2中得到的修正的对角元素代入下式:
[0040][0041]
并将qi(x,y)等比例的转化到1到255之间,得到光照不变特征。本发明采用正交三角分解算法获得人脸图像局部邻域的上三角矩阵的对角线元素,并对其进行非线性放大,再以放大后的对角线元素构建光照不变特征,可显著的提高人脸识别系统在剧烈光照变化下识别的准确率,且本发明的计算方法简单、处理效率高。
[0042]
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1