通过扫描图案及扫描后逻辑滤波器的轴承缺陷自动检测的制作方法
1.本发明涉及一种通过扫描图案(swept pattern)及扫描后逻辑滤波器(post-sweep logic filter)的轴承缺陷自动检测。
背景技术:
2.火车可以具有许多轨道车(/轨道车厢)(rail cars),每个轨道车可以具有多个车轴(/轮轴)(axles)和对应的轴箱(/轮轴箱)(axle-boxes)。每个轴箱可以在其中安装有来自相同的制造商或不同的制造商的轴承。随着时间的推移,轴承由于许多原因(例如,污染、表面缺陷、润滑问题等)而产生(develop)缺陷,该缺陷可以在轴承的振动谐波内被检测出。收集和监测(/监控)(monitor)这些振动谐波以及解决在这些振动谐波中检测到的缺陷的领域被称为状态(/状况)监测。
3.此外,无论传统的状态监测应用是在线还是离线的,安装、利用和维护支持收集和监测轴承振动谐波的轴速传感器可能会是有问题的和/或昂贵的。例如,传统的状态监测应用需要知道在百分之几的公差内的轴速和确切(/准确)(exact)的轴承缺陷(来自轴承的品牌和代号(/型号)(designation)),以在轴承振动谐波内识别与轴承缺陷相关联的振动频谱频率分量/征兆(/症状)(symptom)。
4.此外,状态监测应用依赖于与特定轴承品牌/型号对应的已知或预先建模的轴承缺陷频率,该轴承缺陷频率可以由轴承制造商预先确定并被编目(/分类)(catalogue)以供公众使用。因此,可以将所识别的振动频谱频率与预先确定的轴承缺陷频率(对应于安装在轴箱上的轴承的品牌/型号)进行比较,以最终识别一个或多个轴承缺陷。然而,即使知道近似轴速,但是实际上安装在给定轴箱上的轴承的品牌/型号也可能与指定安装在轴箱上的期望轴承的品牌/型号不同,这可能误判(misdiagnose)或不准确地识别轴承缺陷。
5.许多传统的状态监测应用还需要管理可能会影响轴速计算的特定参数(诸如,以每个轴箱的轮(wheel)直径和轴承代号为例)。必须不断地及时更新组织这些参数的数据库来确保正确地(/恰当地)(properly)管理特定参数。然而,数据库更新过程相对于工时而言可能会是昂贵的(/耗时的),同时还容易出现错误,诸如,以指示安装在给定轴箱上的轴承的品牌/型号不正确的数据为例。
技术实现要素:
6.根据一个或多个非限制性实施方式,提供了一种执行轴承缺陷自动检测的方法。所述方法包括由处理器从一个或多个传感器接收状态(/状况)监测(/监控)数据(condition monitoring data),所述状态监测数据包括联接到可旋转轴的至少一个轴承的振动谐波。所述方法还包括由所述处理器执行图案扫描处理,所述图案扫描处理将至少一个测试图案扫描通过速度范围和轴承类别缺陷频率范围两者。响应于具有至少一个测试图案边带的所述测试图案,还针对所述状态监测数据将所述至少一个测试图案边带扫描通过边带范围,以从最佳匹配值中确定所述图案的基带频率(/基频)和边带频率。所述方法还
包括由所述处理器基于与所述至少一个测试图案相关联的两个或更多个结果中的所述最佳匹配值来确定与所述至少一个轴承相关联的最可能的轴承缺陷类型。所述方法还包括由所述处理器执行扫描后逻辑处理(post-sweep logic process),所述扫描后逻辑处理将来自所述图案扫描处理的一定数量(n)的最新结果与至少一个条件测试进行比较,以确认存在所述最可能的轴承缺陷类型。
7.根据一个或多个非限制性实施方式,在此提供了一种轴承缺陷自动检测系统。所述轴承缺陷自动检测系统包括处理器,所述处理器与一个或多个传感器进行信号通信以接收状态监测数据,所述状态监测数据包括对应于联接到可旋转轴的至少一个轴承的振动谐波。所述处理器被配置为执行图案扫描处理,所述图案扫描处理将至少一个测试图案扫描通过速度范围和轴承类别缺陷频率范围两者。响应于具有至少一个测试图案边带的所述测试图案,所述处理器还将所述至少一个测试图案边带扫描通过针对所述状态监测数据的边带范围,以从最佳匹配值中确定所述图案的基带频率和边带频率。所述处理器还被配置为基于与所述至少一个测试图案相关联的两个或更多个结果中的所述最佳匹配值来确定与所述至少一个轴承相关联的最可能的轴承缺陷类型。所述处理器还执行扫描后逻辑处理,所述扫描后逻辑处理将来自所述图案扫描处理的一定数量(n)的最新结果与至少一个条件测试进行比较,以确认存在所述最可能的轴承缺陷类型。
8.根据一个或多个非限制性实施方式,一种用于控制电子硬件处理器执行轴承缺陷自动检测的计算机程序产品,所述计算机程序产品包括计算机可读存储介质,所述计算机可读存储介质具有体现在其中的程序指令,所述程序指令能够由所述处理器执行以执行操作,所述操作包括接收状态监测数据,所述状态监测数据包括联接到可旋转轴的至少一个轴承的振动谐波。所述操作还包括执行图案扫描处理,所述图案扫描处理将至少一个测试图案扫描通过速度范围和轴承类别缺陷频率范围两者。响应于具有至少一个测试图案边带的所述测试图案,还针对所述状态监测数据将所述至少一个测试图案边带扫描通过边带范围,以从最佳匹配值中确定所述图案的基带频率和边带频率。所述操作(method)还包括基于与所述至少一个测试图案相关联的两个或更多个结果中的所述最佳匹配值来确定与所述至少一个轴承相关联的最可能的轴承缺陷类型。所述操作还包括执行扫描后逻辑处理,所述扫描后逻辑处理将来自所述图案扫描处理的一定数量(n)的最新结果与至少一个条件测试进行比较,以确认存在所述最可能的轴承缺陷类型。
9.通过本公开的技术来实现了另外的特征和优点。在此详细描述了本公开的其他实施方式和方面。为了更好地理解具有优点和特征的本公开,请参照说明书和附图。
附图说明
10.在权利要求书中特别指出并明确要求保护该主题。通过以下结合附图的具体实施方式,在此的实施方式的前述和其他特征以及优点是显而易见的,在附图中:
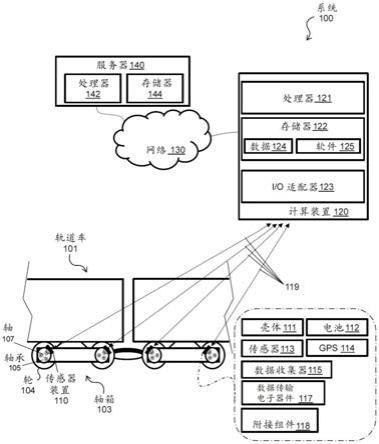
11.图1描绘了根据一个或多个实施方式的系统;
12.图2a和图2b描绘了根据一个或多个实施方式的处理流程;
13.图3描绘了根据一个或多个实施方式的与基带图案(/基波图案/基本图案)(fundamental pattern)扫描处理相关联的曲线图;
14.图4描绘了根据一个或多个实施方式的与边带图案扫描处理相关联的曲线图;以
及
15.图5描绘了示出根据一或多个实施方式的示例算法的流程图。
具体实施方式
16.在此的实施方式涉及用于轴承内的速度和缺陷识别的扫描图案(swept pattern)概率(/可能性)计算(sppc=swept pattern probability calculation)。轴承和相关机械(/机器)上的轴承缺陷可以包括但不限于,由于压痕(brinelling)、摩擦腐蚀压痕(/假压痕)(false brinelling)、腐蚀、污染、缺乏润滑或过大的滚动压力,轴承的裂片(/碎片)(spalls)或薄片(flake)从轴承滚道(内滚道或外滚道)和/或滚子和/或滚子的保持架脱落(/剥落)(例如,由于破裂(spalling)和断裂(spallation))。根据一个或多个实施方式,sppc自动检测算法可以由一个或多个器件实现为自动检测轴承和相关机械上的轴承缺陷,而无需知道精确(/准确)(exact)的轴速以及安装在给定轴箱上的确切的轴承品牌/型号。
17.例如,因为轨道(/铁路)(railway)轴箱(axle-box)的轴承和相关机械可以在使用期间提供振动频谱(例如,轴承振动谐波(bearing vibration harmonics)),所以当产生(develop)轴承缺陷时,在振动频谱中可能会出现缺陷分量/征兆(/症状)(symptom)。根据本教导的各种非限制性实施方式的sppc自动检测算法能够在不知道轴速以及安装在给定轴箱上的确切轴承品牌/型号的情况下确认轴承缺陷类型。然后可以利用确认的轴承缺陷类型来确定精确的轴速,该轴速可以用于执行进一步的诊断操作和/或劣化分析。虽然在此的实施方式是针对轨道轴箱来描述的,但是在此的实施方式不限于此。也就是说,尽管在此的实施方式涉及处理轨道状态(/状况)监测(/监控)(monitor)误差(诸如,将全球定位系统(gps)线性速度转换为轴旋转速度所需的轮直径管理误差),但是在此的实施方式适合于横跨许多行业的许多状态监测应用(其中,转速计(tachometer)或速度输入部未安装或不可用)。
18.图1描绘了根据一个或多个实施方式的系统100。系统100包括至少一个轨道车(/轨道车厢)(railcar)101,至少一个轨道车101包括至少一个轴箱(/车轴箱)103。轴箱103包括通过紧固元件附接到其上的一个或多个轮104(例如,轨道转向架轮(/轨道负重轮)(rail bogie wheel))。注意,虽然仅示出了单个轴箱,但是大多数轨道车具有两个转向架,因此具有两个车轴(/轮轴),所述两个车轴带有(例如,通过轨道转向架轮的轴箱轴承)附接到其上的八个轮和八个轴箱。通常,轴箱103的轴承座(/轴承壳体)(bearing housing)包括轨道转向架轮的轴箱轴承105(例如,(一个或多个)轴承105)和螺栓构造,轨道转向架轮的轴箱轴承105将轴承座可旋转地联接到对应的轮104,螺栓构造将轴承座附接到轴箱103。例如,火车通常包括两个至超过七十个轨道车101,这意味着在包括列车车队的系统100内可以存在数千个轴承。
19.此外,根据一个或多个实施方式,总体上示出了系统100。系统100可以包括电子计算机框架,该电子计算机框架包括和/或采用任意数量和任意组合的计算装置和利用各种通信技术的网络(如在此所描述的)。系统100可以容易地可扩展(scalable)、可扩充(extensible)和模块化,具有改变为不同服务或独立于其他特征重新配置一些特征的能力。
20.系统100包括多个状态监测传感器装置中的至少一个传感器装置110。每个传感器
装置110是可以包括以下部件的电子装置:壳体111、电池112、至少一个传感器113(例如,用于振动、温度等的换能器)、数据收集器115(例如,如在此所描述的处理器和存储器)、gps 114、数据传输电子器件117(例如,无线调制解调器和/或近场通信(nfc)应答器)以及将传感器装置110固定到轮104的附接组件118(例如,其多个固定螺栓中的一个)。附接组件118可以是将传感器装置110附接到待监测的机械系统的任意支架、凸缘等。
21.例如,每个传感器装置110可以是紧凑的电池操作装置(例如,使用电池112),其测量其所附接的轮104(例如,具体地,附接到该轮104的紧固元件中的至少一个)的轴承的静态和动态数据(例如,状态监测数据)。经由数据传输电子器件117,每个传感器装置110可以将状态监测数据无线地传输(如由双箭头119表示)到诸如计算装置120的装置、服务器和系统。
22.根据一个或多个实施方式,每个传感器装置110的数据收集器115的存储器和/或数据传输电子器件117可以存储状态监测(结果),和/或可以与唯一传感器标识符相关联。例如,nfc应答器可以用至传感器装置110的无线调制内部相关联的唯一传感器标识符来预编程,和/或可以用与该特定传感器和安装位置(例如,它是否安装在轨道转向架轮的轴箱轴承上或附近)有关的细节来预编程。此外,以各种预定义的间隔并且用速度门控(例如,当轨道车101正在移动并且没有停放在轨道停车场(rail yard)中时),传感器装置110记录状态监测数据。
23.计算装置120包括一个或多个中央处理单元(cpu)(统称或总体上称为电子硬件处理器121,或简称为处理器121)。处理器121经由系统总线联接到存储器122和各种其他组件。存储器122可以包括只读存储器(rom)和随机存取存储器(ram)。rom联接到系统总线,并且可以包括控制计算装置120的特定基本功能的基本输入/输出系统(bios)。ram是联接到系统总线以供处理器121使用的读写存储器。存储器122存储数据124和软件125。
24.数据124包括以各种数据结构组织的定性或定量变量的一组值,以支持软件125的操作并供软件125的操作使用。根据一个或多个实施方式,存储器122可以从传感器装置110累积和/或存储数据124以供计算装置120使用。在这方面,例如,数据124可以包括状态监测数据(例如,轴承的振动和温度、轴承振动谐波)以及速度范围(例如,从轴箱103的轴由于轴承而可以回旋/旋转的最高期望速度到最低期望速度的范围)、近似的(即,不确切的)速度值。在一个或多个实施方式中,对于待检测的每种缺陷类型,速度值是当机器(例如,轨道车101)在给定速度范围内运行(/操作)持续阈值时间(例如,大于80%的时间)时的假定速度、均方根(/统计平方公差/统计数据的平方和的平方根/和方根)(root sum squared)(rss)值、轴承代号、唯一传感器标识符、数据累积的预定义间隔、轴承类别缺陷频率范围。尽管未指示特定的轴承品牌/型号或特定的轴承缺陷频率,但是轴承类别缺陷频率的范围可以是预先确定的(例如,预先计算的),以包含与轴承品牌/型号对应的类别的轴承缺陷频率。在一个或多个示例中,轴的速度可以被定义为每分钟转数,如通过利用近似的轨道轮直径的gps计算所确定的。
25.进一步注意,一个或多个缺陷图案中的每个可以是关于成类的轴承缺陷的随时间(例如,随着成类的轴承缺陷产生)的一组频率,而特定轴承类型和/或特定轴承缺陷频率是未知的。在这方面,该组频率与健康轴承操作之外的缺陷分量/征兆相关。可以对缺陷测试图案(defect test pattern)进行加权,使得最大匹配(例如,在频率与缺陷分量/征兆之间
的最大匹配)相对于其他匹配给出最高值。缺陷测试图案中的每个缺陷分量/征兆具有最大值1,但通常小于1。一个或多个缺陷测试图案的示例可以包括检测外滚道缺陷频率的球过频率外(bpfo)图案、检测内滚道缺陷频率的球过频率内(bpfi)径向和轴向负载图案、检测球轴承缺陷频率的球自转频率(bsf)图案以及检测保持架缺陷频率的保持架基带频率(/基频)(ftf)图案。可以应用测试图案的加权,使得bpfo图案每5个谐波具有1
×
bpfo,bpfi径向和轴向负载图案每3个谐波具有1
×
bpfi且带有1
×
n个边带(sideband),bsf图案具有1
×
bsf或2
×
bsf以及带有ftf边带的少量谐波,并且保持架ftf图案具有1
×
ftf和少量谐波。
26.软件125被存储为用于在处理器121上执行的指令。也就是说,存储器122也是可被处理器121读取的有形存储介质的示例,其中软件被存储为用于由处理器121执行以使系统100运行(/操作)的指令,诸如,在此参照图2至图3所描述的指令。注意,软件125可以驻留(reside)在许多类型的状态监测系统内的任何位置,并且可以提供存储操作、趋势(分析)操作和报警操作,当存在缺陷时,sppc提供轴速、缺陷类型和频率以用于相应的系统状态指标(indicator)(ci)计算。例如,根据一个或多个实施方式,如在此所描述的,软件可以包括sppc自动检测算法。通常,sppc自动检测算法可以由计算装置120实现,以自动检测轴箱103的轴承(例如,轨道轴箱轴承)上的轴承缺陷,而无需知道准确的轴速,从而节省了成本(例如,工时)并减少了管理不断变化的轮直径的误差。
27.当执行软件的sppc自动检测算法时,计算装置120将若干加权测试图案扫描通过(i)指定的速度范围和(ii)轴承类别缺陷频率范围,并且针对每步(step)和每个缺陷测试图案类型计算图案与噪声滤波频谱相关(pattern-to-noise filtered spectrum correlations)的rss值。通过提供最大值的测试图案识别最可能的缺陷类型。在一个或多个非限制性实施方式中,对各个测试图案加权,使得当多于一个测试图案跨过一组频谱分量时,只有具有最佳匹配(概率)的一个测试图案给出最高值。在一个或多个非限制性实施方式中,可以通过各种方法将频谱毯噪声(carpet noise)和不可识别的比毯高的峰值归零来增强初始扫描。
28.在下文中,从一系列最新(/最后)(last)或最近数量“n”个测量值或结果中,执行扫描后逻辑(post-sweep logic)。在一个或多个实施方式中,存储在存储器中的查找表(lut)可以包括针对每个图案的“n”行,其中,行定义测量值或结果。在一个或多个非限制性实施方式中,测量值或结果包括但不限于轴rpm、图案匹配值、基带频率和边带频率。扫描后逻辑处理包括多个分析或条件测试,以确认初始最可能检测到的缺陷类型实际上是实际(/真实)(actual)缺陷类型。所述条件测试包括:(i)确定“n”个测量值中的大于n/2个测量值属于相同缺陷类型;(ii)其中,大于n/2的图案相关值大于或等于指定阈值(例如,典型是0.2至0.3的ge峰值,或者如果以m/s^2为单位,则峰值为2至3);以及(iii)其中,所识别的基带频率和边带频率的大于n/2与轴rpm(如从gps速度和轮“中间直径”确定的)相关比指定的gps%精度范围小的误差。在一个或多个非限制性实施方式中,最大误差是由于未知轮直径引起的恒定(在n个测量值内)偏差(offset),而gps/nss系统增加了随机的较小误差。因此,考虑到gps/gnss误差,最新的n个测量值内的比率在80%的时间内可以改变小于gps/gnss误差。换句话说,gps百分比(%)精度范围可以设定为具有小于+/-3%的误差的测量值的80%。因此,如在此所描述的系统和由该系统执行的方法提供一种扫描后逻辑处理,其能够为每个轴承缺陷图案确定第一逻辑值(例如,指示负或不准确检测的逻辑“0”值,或指示正
检测的逻辑“1”值),该第一逻辑值有效地确认使用扫描处理识别的初始最可能检测到的轴承缺陷类型实际上是实际的轴承缺陷类型。还可以提供确切的缺陷基带频率和边带频率以用于诊断目的。
29.计算装置120包括联接到系统总线的一个或多个输入/输出(i/o)适配器123。一个或多个i/o适配器123可以包括与系统存储器122和/或任何其他类似组件通信的小型计算机系统接口(scsi)适配器。一个或多个i/o适配器123可以包括与传感器装置110的nfc应答器通信的nfc应答器。例如,一个或多个i/o适配器123可以使系统总线与网络130互连(/互相连接)(interconnect)(网络130可以是外部网络),使得系统100能够与其他这样的系统(即,服务器140)通信。
30.系统100还包括网络130和服务器140。网络130包括连接在一起、共享资源的计算机组。如在此所描述的,网络130可以是任何类型的网络,包括局域网(lan)、广域网(wan)或因特网(/互联网)。服务器140包括处理器142和存储器144(如在此所描述的),并且向计算装置120提供各种功能,诸如,共享和存储数据124、提供处理资源和/或执行计算(例如,实现软件125)。
31.根据一个或多个实施方式,例如,服务器140可以是云托管状态监测系统,其通过处理器142执行存储在存储器144中的软件(例如,包括sppc自动检测算法的软件125)。此外,以各种预定义的间隔(例如,诸如当轨道车101在使用结束时停放在轨道停车场中时),服务器140的云托管状态监测系统从传感器装置110下载并存储数据(例如,包括唯一传感器标识符和/或相应的状态监测数据的数据124)。因此,服务器140的软件可以使用其中的数据来执行与计算装置120的软件125类似的操作。
32.现在转到图2a和图2b,根据一个或多个实施方式描绘了由系统100实施的处理流程200。处理流程200可以由系统100的任何组件来实施。通常,关于处理流程200,速度和确切或特定的轴承细节都是未知的。也就是说,不仅确切的轴速(例如,rpm)是未知的,而且确切的轴承细节(诸如,以特定的轴承品牌/型号以及对应的轴承缺陷频率为例)也是未知的。还可以通过各种方法将频谱毯噪声和不可识别的比毯(噪声)高的峰值“归零”来增强处理流程200。
33.处理流程200开始于操作202,并且计算机(例如,计算装置120和/或服务器140)从一个或多个传感器(例如,传感器装置110)接收/累积状态监测数据。根据一个或多个实施方式,状态监测数据以及在此描述的其他数据可以从传感器装置110传输(例如,如图1中的双箭头119所示)到计算装置120。更特别地,状态监测数据包括与轴相关联的轴承的振动谐波。计算装置120还可以通过网络130将状态监测数据以及在此描述的其他数据转发到服务器140。因此,计算装置120和服务器140两者累积足够的信息来支持处理流程200的执行。状态监测数据的累积可以以预定义的间隔发生,并且在一些情况下,累积(操作)每天执行两次(例如,在轨道车101离开轨道停车场之前以及在其返回之后)。
34.在操作204处,计算机(例如,计算装置120和/或服务器140)针对状态监测数据执行扫描处理。扫描处理包括将一个或多个测试图案扫描通过(i)速度范围以及(ii)针对每步和待检测的每个缺陷图案类型计算的轴承类别缺陷频率范围。尽管未指示特定的轴承品牌/型号或特定的轴承缺陷频率,但是轴承类别缺陷频率的范围可以是预先确定的(例如,预先计算的),以包含与轴承品牌/型号对应的类别的轴承缺陷频率。因此,利用轴承类别缺
陷频率范围可以缩小可能的图案分量以及特定基带频率和边带频率范围(适用于轴承缺陷诊断和检测)。根据一个或多个实施方式,计算装置120和/或服务器140可以在它们各自的存储器122和144中存储速度范围。尽管未指示精确的速度,但是该速度范围可以针对测量时的条件从最高期望速度到最低期望速度来预定义,并且包括多个速度步长(speed step)。
35.根据非限制性实施方式,扫描处理在若干次迭代中将测试图案移动通过频谱,其中每次迭代被称为“速度步长”。在一个或多个非限制性实施方式中,步长(step size)被设定为1/2窗口(/区间)(bin)。此外,计算装置120和/或服务器140可以执行软件(例如,软件125)以按照速度范围的每个速度步长扫描/应用这些测试图案,该软件计算针对每个速度步长和每个测试图案类型的速度/图案相关的rss值(例如,在最高频率分量时的窗口的小部分)。一个或多个窗口对应于频谱,使得如果有带有800条线的1000赫兹频谱,则针对每条线的每个窗口具有与该窗口的中心频率相关联的多少振动能量的值(例如,1.25赫兹的宽度)。
36.转到图3,根据一个或多个实施方式描绘了曲线图300。曲线图300示出了由sppc自动检测算法的测试图案306扫描304的振动谐波302的图案扫描处理的示例。图案扫描处理将测试图案以基带频率的小增量(increment)移动通过频谱。
37.振动分量频率308由图案分量310识别。在一个或多个实施方式中,每个图案分量310对应于由阶数(以及每个阶的任一侧的边带的数量(如果存在的话))定义的若干分量。在基带扫描(/基波扫描/基本扫描)(fundamental sweep)期间,图案分量310变得与振动分量308重合(/一致)(coincidental)。随着图案分量310变得与振动分量308重合时,通过将图案分量加权值的rss(均方根)值乘以对应的频谱窗口值(它们在该扫描步长中对准(/对齐))而获得的乘积达到该图案的最大值。因此,在若干不同类型的缺陷图案中,具有最大的最大值的缺陷图案识别最可能存在的缺陷类型。如所示出的,曲线图300还示出了分别由sppc自动检测算法的图案分量316和318扫描的振动谐波312和314的其他示例。还要注意,图案加权使得如果多于一个图案跨过一组频谱分量,则只有具有最佳匹配(概率)的一个图案给出(/赋予)最高值。
38.在一些实例中,当已知在图案扫描处理中采用的所选择的测试图案包括一对或多对边带时,图案扫描处理还包括执行边带扫描处理。例如,图4描绘了根据一个或多个实施方式的与边带图案扫描处理相关联的曲线图350。曲线图350描绘了基波信号分量的一阶352、基波信号分量的二阶354和基波信号分量的三阶356。
39.基波信号分量的一阶352包括具有与频率分量的一阶352相同的正或负(+/-)频率步长的边带。为简单起见,未示出附加的边带组。然而,在不脱离本发明的范围的情况下,基波信号分量的一阶352可以包括附加的边带。与基波信号分量的一阶352相关联的第一组边带包括第一边带扫描范围开始位置358和第一边带扫描范围结束位置360。因此,边带图案扫描处理包括执行第一边带开始扫描362(+/-频率)和第一边带结束扫描364(+/-频率)。
40.基波信号分量的二阶354包括具有与频率分量的一阶352相同的+/-频率步长的边带。与基波信号分量的二阶354相关联的第一组边带包括第二边带扫描范围开始位置366和第二边带扫描范围结束位置368。因此,边带图案扫描处理包括执行第二边带开始扫描370(+/-频率)和第二边带结束扫描372(+/-频率)。
41.基波信号分量的三阶356包括具有与频率分量的一阶352相同的+/-频率步长的边带。与基波信号分量的三阶356相关联的第一组边带包括第三边带扫描范围开始位置374和第三边带扫描范围结束位置376。因此,边带图案扫描处理包括执行第三边带开始扫描378(+/-频率)和第三边带结束扫描380(+/-频率)。
42.边带图案扫描处理包括针对在此描述的基带扫描处理的每个增量(步长)执行全边带扫描。边带扫描涉及基阶δ频率(即,δ间隔)中的每个的任一侧的边带,该边带从特定边带缺陷基带频率+/-变化边带缺陷范围。
43.对于边带扫描处理,将步长(step size)设定为使得最宽的边带分量递增,即步进(stepped)。在至少一个非限制性实施方式中,在图案相关中不使用插值法(interpolation)。例如,当在图案相关中不使用插值法时,对于每个边带扫描步长,将步长设定为1/2窗口。因此,通过将步长减小到1/2窗口以下,频率精度或幅度精度没有增加(例如,对于图案中的最高阶)。然而,当在图案相关中使用插值法时,将步长设定为1/4窗口或甚至更小。因此,两种精度随着步长减小而增加,但是处理时间会增加。
44.在一个或多个非限制性实施方式中,边带扫描处理作为基带扫描处理的循环内的循环(loop)来执行。例如,一旦创建了缺陷测试图案并对缺陷测试图案进行了加权(weighted),就可以为缺陷测试图案确定边带的数量(如果有的话)。当缺陷测试图案包括边带时,确定扫描范围和步长,并且将边带扫描处理作为根据基带扫描处理执行的基带扫描循环内的循环来执行。在一个或多个非限制性实施方式中,当缺陷测试图案不包括边带时,可以省略边带扫描处理。
45.再次参照图2a,在操作206处,由计算机将每个图案分量(例如,一个或多个缺陷测试图案)乘以匹配的环境频谱分量。在一些示例实施方式中,使用插值后的匹配环境频谱分量来执行将一个或多个图案中的每个图案分量乘以匹配的环境频谱分量。在其他示例实施方式中,使用二次峰值插值后的匹配环境频谱峰值来执行将一个或多个测试图案中的每个图案分量乘以匹配环境频谱分量。在操作208处,计算机将图案分量加在一起。在一些示例实施方式中,可以使用均方根(/统计平方公差/统计数据的平方和的平方根/和方根)(rss)将图案分量加在一起。在操作210处,相加生成一个或多个输出值。输出值包括但不限于每个定义图案的频率。在一个或多个实施方式中,输出值可以存储在数据库或缓冲器(/缓冲区)(buffer)大小为“n”的先进先出fifo存储器(first-in-first-out fifo memory)中。因此,在此描述的扫描后逻辑处理可以访问数据库或缓冲器以获得一系列最新的“n”个测量值,测量值指示由每个定义图案的存储频率识别的最可能的轴承缺陷类型。
46.转到操作212(参见图2b),计算机对指示最可能的轴承缺陷类型的“n”个最新的测量值执行扫描后逻辑处理(post-sweep logic process)。根据非限制性实施方式,扫描后逻辑处理中包括的操作由虚线框213指示。在操作214处,确定针对“n”个最新测量值中的每个测量值的具有最高图案匹配值的缺陷类型。在操作216处,确定“n”个最新测量值之中的最流行(/出现最多)(most popular)的相同类型缺陷的数量(称为“n
1”)。在操作218处,确定相同类型缺陷的数量(即,n1)大于目标值(n/2)。在操作220处,确定相同类型缺陷(即,n1)之中,它们的数量(在此称为“n
2”)满足大于或等于图案相关阈值(th
pc
)的图案相关值(pc)。在操作222处,确定在满足th
pc
的相同类型缺陷(即,n2)之中,它们的数量(在此称为“n
3”)大于目标值(即,n/2)。在操作224处,将满足th
pc
的相同类型缺陷的数量(即,n3)确定为具有识
别的基带频率和边带频率,识别的基带频率和边带频率与轴rpm相关小于指定gps百分比(%)精度范围的误差。在一个或多个非限制性实施方式中,gps百分比(%)精度范围被设定为具有小于+/-3%的误差的测量值的80%。
47.在操作226处,基于确定满足th
pc
的相同类型缺陷的数量(即,n3)大于目标值(即,n/2),将最可能的轴承缺陷类型确认为确切的轴承缺陷类型。此外,在操作226处,确认轴承缺陷频率和准确的轴速,即确切或实际的轴速。通过振动信号中存在缺陷和已知的轴承缺陷比率来确认确切的轴速。在操作218-224的任何情况下,当不满足目标值(即,不大于n/2)时,或者当不满足th
pc
(即,n2小于th
pc
)时,或者当rpm相关不小于误差时,可以产生警告。例如,在虚线框228(例如,可选操作)处,计算机输出一个或多个结果。在这方面,技术人员可以容易地确定由计算机监测的任何轴承的问题并采取补救措施(例如,更换或修理轴承)。注意,如果不存在缺陷分量,则是否知道速度并不重要。如果在状态监测数据内存在其他频谱分量(例如,来自机器动力(machine dynamics)/机械),则其他频谱分量也可以具有与其相关联的图案,以在没有轴承缺陷的情况下计算速度。
48.现在转到图5,流程图描绘了根据非限制性实施方式的用于执行边带扫描处理的示例算法500。示例算法400开始于接收初始调节监测数据的框402和404。初始条件监测数据包括但不限于针对轴rpm的包络加速度测量的振动频谱(如框401所示)、计算的速度范围、扫描步长以及针对每个步长计算的轴承类别缺陷频率范围(如框404所示)。尽管轴承缺陷特定图案分量以及特定基带频率范围和边带频率范围是未知的,但是可以利用轴承缺陷频率的类别来缩小可能的图案分量以及特定基带频率范围和边带频率范围(适用于轴承缺陷诊断和检测)。在一个或多个非限制性实施方式中,当gps具有误差范围(例如,+/-5%)并且轮直径与用于计算rpm(轴速)的所述直径相差具有误差值(例如,+/-5%)时,则扫过测试图案的速度范围包括至少部分地基于gps误差范围和轮直径误差值的可接受的最小误差值,在该示例中,可接受的最小误差值将为至少约+/-10%。
49.然后,在框410处,示例算法400将变量初始化。例如,分别将相关值、基带频率和边带频率初始化为零。在框415处,针对轴承的每个振动谐波,进入for循环。更特别地,对于基带范围(例如,从高到低),示例算法400逐步通过基带步长,以跨过(crosss)振动谐波扫描测试图案。尽管扫描方向被描述为从高到低,但是应理解,在不脱离本发明的范围的情况下,扫描方向可以从低到高。在判定框(/判断框)(decision block)425处(如do箭头所示),for循环包括确定边带的数量是否大于零。如果边带的数量不大于零,则示例算法400进行到框430(例如,遵循“否”箭头)。
50.在框430处,调用相关函数,并且在判定框440处,确定相关值中的任意相关值是否大于存储值。如果相关值大于存储值,则示例算法400进行到框445(例如,遵循“是”箭头)以执行更新操作。然后,示例算法400在框450进入到下一图案,框450将算法返回到框415。在返回到框415后,示例算法400返回特定缺陷类型(例如,针对任何被识别的相关值以及基带频率,如框451所示)。在框445处,更新相关值和频率。如果边带的相关值不大于存储值,则示例算法400进行到框450(例如,遵循“否”箭头)。
51.返回到判定框425,如果边带的数量大于零,则示例算法400进行到框460(例如,遵循“是”箭头)。在框460处,针对轴承的每个振动谐波,进入另一个for循环。更特别地,针对边带范围(低到高),示例算法400逐步通过边带步长,以跨过振动谐波扫描图案。在完成for
循环之后,该方法进行到框463,以执行扫描后逻辑(psl)处理。扫描后逻辑处理在上面例如参照图2b被详细地描述,因此为了简洁起见将不再重复。
52.在框465处,调用相关函数。在判定框470处,确定相关值中的任意相关值是否大于存储值。如果相关值不大于存储值,则示例算法400进行到框450(例如,遵循“否”箭头)。如果相关值大于存储值,则示例算法400进行到框480(例如,遵循“是”箭头)。在框480处,更新相关值和频率。然后,示例算法400进行到框450。
53.在此参照相关附图描述了本发明的各种实施方式。可以想到本发明的替代实施方式,而不会脱离本发明的范围。在以上描述和附图中阐述了元件之间的各种连接和位置关系(例如,上方、下方、相邻等)。除非另有说明,否则这些连接和/或位置关系可以是直接的或间接的,并且本发明不旨于在这方面进行限制。因此,实体的联接可以指直接联接或间接联接,并且实体之间的位置关系可以是直接位置关系或间接位置关系。此外,在此描述的各种任务和处理步骤可以合并(/被包含)到具有在此未详细描述的附加步骤或功能的更全面的程序或处理中。
54.以下限定和缩写用于解释权利要求书和说明书。如在此所使用的,术语“包含”、“包含
……
的”、“包括”、“包括
……
的”、“具有”、“具有
……
的”、“含有”或“含有
……
的”或它们的任何其他变型旨在涵盖非排他性的包含。例如,包含一列要素的组合物、混合物、处理、方法、制品或设备不必须仅限于那些要素,而是可以包括未明确列出的或这样的组合物、混合物、处理、方法、制品或设备固有的其他要素。
55.另外,术语“示例性”在此用于表示“用作示例、实例或说明”。在此描述为“示例性”的任何实施方式或设计不必须被解释为比其他实施方式或设计优选或有利。术语“至少一个”和“一个或多个”可以被理解为包括大于或等于一的任何整数个,即一个、两个、三个、四个等。术语“多个”可以被理解为包括大于或等于二的任何整数个,即两个、三个、四个、五个等。术语“连接”可以包括间接“连接”和直接“连接”两者。
56.术语“约”、“大体上”、“近似”以及它们的变型旨在包括与基于提交本技术时可用的装备的特定量的测量相关联的误差程度。例如,“约”可以包括给定值的
±
8%或
±
5%或
±
2%的范围。
57.为了简洁起见,可以在此详细描述或可以不在此详细描述与实现和使用本发明的方面相关的常规技术。特别地,用于实现在此描述的各种技术特征的计算系统和特定计算机程序的各个方面是公知的。因此,为了简洁起见,在此仅简要地提及或完全省略许多常规的实施细节,而不提供公知的系统和/或处理的细节。
58.本发明可以是任何可能的技术细节集成水平(level)的系统、方法和/或计算机程序产品。计算机程序产品可以包括计算机可读存储介质(或多个介质),所述计算机可读存储介质上具有用于使处理器执行本发明的各方面的计算机可读程序指令。
59.计算机可读存储介质可以是可以保持和存储供指令执行装置使用的指令的有形装置。计算机可读存储介质可以是例如但不限于电子存储装置、磁存储装置、光存储装置、电磁存储装置、半导体存储装置或前述的任何合适组合。计算机可读存储介质的更具体示例的非穷尽列表包括以下内容:便携式计算机磁盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦除可编程只读存储器(eprom或闪存)、静态随机存取存储器(sram)、便携式光盘只读存储器(cd-rom)、数字通用光盘(dvd)、记忆棒、软盘、机器编码装置(诸如,其上记录
有指令的穿孔卡或槽中的隆起结构)以及前述的任何合适组合。如在此所使用的计算机可读存储介质不应被解释为瞬时信号本身,诸如,无线电波或其他自由传播的电磁波、通过波导或其他传输介质传播的电磁波(例如,穿过光纤缆线的光脉冲)或者通过电线传输的电信号。
60.在此描述的计算机可读程序指令可以从计算机可读存储介质下载到相应的计算/处理装置,或者经由网络(例如,因特网、局域网、广域网和/或无线网络)下载到外部计算机或外部存储装置。网络可以包括铜传输电缆、光传输光纤、无线传输、路由器、防火墙、交换机、网关计算机和/或边缘服务器。每个计算/处理装置中的网络适配器卡或网络接口从网络接收计算机可读程序指令,并且转发计算机可读程序指令以存储在相应计算/处理装置内的计算机可读存储介质中。
61.用于执行本发明的操作的计算机可读程序指令可以是汇编指令、指令集架构(isa)指令、机器指令、机器相关指令、微代码、固件指令、状态设定数据、集成电路的配置数据或者以一种或多种编程语言的任何组合编写的源代码或目标代码,所述一种或多种编程语言包括面向对象的编程语言(诸如,smalltalk、c++等)以及程序化编程语言(诸如“c”编程语言或类似编程语言)。计算机可读程序指令可以完全在用户的计算机上执行、部分地在用户的计算机上执行、作为独立软件包执行、部分地在用户的计算机上且部分地在远程计算机上执行或者完全在远程计算机或服务器上执行。在后一种情况下,远程计算机可以通过任何类型的网络(包括局域网(lan)或广域网(wan))连接到用户的计算机,或者可以(例如,通过使用因特网服务提供商的因特网)进行到外部计算机的连接。在一些实施方式中,包括例如可编程逻辑电路、现场可编程门阵列(fpga)或可编程逻辑阵列(pla)的电子电路可以通过利用计算机可读程序指令的状态信息使电子电路个性化来执行计算机可读程序指令,以执行本发明的各方面。
62.在此参照根据本发明的实施方式的方法、设备(系统)和计算机程序产品的流程图示和/或框图来描述本发明的各方面。将理解的是,流程图示和/或框图的每个框(/块)以及流程图示和/或框图中的框的组合可以通过计算机可读程序指令实现。
63.可以将这些计算机可读程序指令提供给通用计算机、专用计算机或用于生产机器的其他可编程数据处理设备的处理器,使得经由计算机或其他可编程数据处理设备的处理器执行的指令创建用于实现在流程图和/或框图的一个框或者多个框中指定的功能/动作的装置。这些计算机可读程序指令还可以存储在计算机可读存储介质(计算机可读存储介质可以指导计算机、可编程数据处理设备和/或其他装置以特定方式起作用)中,使得其中存储有指令的计算机可读存储介质包括制造品,所述制造品包括实现流程图和/或框图的一个框或多个框中指定的功能/动作的各方面的指令。
64.计算机可读程序指令还可以被加载到计算机、其他可编程数据处理设备或其他装置上,以使得将在计算机、其他可编程设备或其他装置上执行的一系列操作步骤产生计算机实现的过程,使得在计算机、其他可编程设备或其他装置上执行的指令实现在流程图和/或框图的一个框或多个框中指定的功能/动作。
65.附图中的流程图和框图示出了根据本发明的各种实施方式的系统、方法和计算机程序产品的可行实现方式的架构、功能和操作。在这方面,流程图或框图中的每个框可以表示指令的模块、段或部分,所述模块、段或部分包括用于实现指定的逻辑功能的一个或多个
可执行指令。在一些替代实现方式中,框中指出的功能可不按附图中指出的顺序执行。例如,根据所涉及的功能,连续示出的两个框实际上可以基本上同时执行,或者这些框有时可以以相反顺序执行。还将注意,框图和/或流程图示中的每个框以及框图和/或流程图示中的框的组合可以由执行指定功能或动作的或者实行专用硬件和计算机指令的组合的基于专用硬件的系统来实现。
66.在此使用的术语仅出于描述特定实施方式的目的,而非意在限制。除非上下文另外清楚地指示,否则如在此所使用的,单数形式也意在包括复数形式。将进一步理解的是,当在本说明书中使用术语“包括”和/或“包含”时,列举存在所陈述的特征、数量、步骤、操作、元件和/或组件,但不排除存在或添加一个或多个其他特征、数量、步骤、操作、元件、组件和/或它们的组。
67.已经出于说明的目的呈现了在此的各种实施方式的描述,但是并不旨在穷举或限于所公开的实施方式。许多变型和变化对于本领域普通技术人员将是显而易见的,而不会脱离所描述的实施方式的范围和精神。选择在此使用的术语是为了最佳地解释实施方式的原理、实践应用或对市场中已有(/已发现)的技术的技术改进,或者使本领域普通技术人员能够理解在此公开的实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1