基于神经网络和物理模型的车辆动力学模拟实现方法
1.本发明涉及的是一种智能交通管理领域的技术,具体是一种基于神经网络和物理模型的车辆动力学模拟实现方法,适用于车辆纵横垂等方向动力学的建模,并充分利用数据驱动方法的优势来提升物理模型的建模精度。同时兼备物理可解释性以及数据驱动模型的高精度动力学表征能力。
背景技术:
2.车辆动力学模型是车辆动力学仿真以及车辆控制的关键。车辆作为一个复杂的多体系统,其动力学模型有两种:物理模型和数据驱动模型。物理模型基于物理规律进行车辆动力学建模,复杂的车辆系统往往会被简化为简单模型,基于此得到的车辆动力学物理模型精度较低,往往不能准确描述复杂的车辆系统动力学特性,对非线性工况的适用能力有限。数据驱动模型的构建依赖大量的车辆动力学测量数据,模型的准确度和鲁棒性取决于数据的场景覆盖完整度,较现有的物理学模型而言,此类模型的精度较高,但它的物理不可解释性和模型低鲁棒性阻碍了其在车辆系统中的大规模应用。现有改进的车辆避撞技术采用长短时记忆递归神经网络lstm构建车辆轨迹预测模型,但这些技术未考虑基于数据对具有短时域轨迹预测功能的车辆动力学模型进行模型优化,对非线性工况的适应能力有限。
技术实现要素:
3.本发明针对现有技术存在的上述不足,提出一种基于神经网络和物理模型的车辆动力学模拟实现方法,充分考虑物理规律和数据驱动优势,利用采集到的车辆状态数据用于车辆物理模型中未知参数的学习,将参数模型和动力学模型结合起来得到一个准确的混合模型用于车辆动力学表征。
4.本发明是通过以下技术方案实现的:
5.本发明涉及一种基于神经网络和物理模型的车辆动力学模拟实现方法,结合神经网络车辆参数模型与车辆动力学物理模型,将神经网络的输出作为车辆动力学模型的参数输入,得到基于神经网络和车辆动力学的混合车辆动力学模型,制定实车实验数据采集方案,经实验完成实车数据采集以训练混合车辆动力学模型,实现对车辆动力学特性的高精度建模和表征。
6.所述的神经网络,具体为:net(v
x
,γ,δ
f
)=(c
f c
r
)
t
,其中:纵向速度v
x
、横摆角速度γ、转向角δ
f
、前轮轮胎侧偏刚度c
f
、后轮轮胎侧偏刚度c
r
、t为转置。
7.所述的混合车辆动力学模型,具体为:所述的混合车辆动力学模型,具体为:该基础模型的输入为转向角δ
f
,输出为侧向速度v
y
和横摆角速度γ,其中:车辆质量m、前轮轮胎侧偏刚度c
f
、后轮轮胎侧偏刚度c
r
、车辆质心到前轴中心的距离a、车辆质心到后轴中心的距离b、车辆绕竖轴的转动惯量i、车辆纵向速度v
x
。
技术效果
8.本发明整体解决了现有技术中对车辆动力学建模单独采用物理建模或数据驱动建模方法的缺陷,通过将物理模型中的参数c
f
和c
r
作为时变的参数,并通过神经网络进行辨识,能够更加准确地描述车辆的动力学特性。与现有技术相比,本发明能够更好地描述车辆侧向动力学特性,更准确地预测侧向速度和横摆角速度。
附图说明
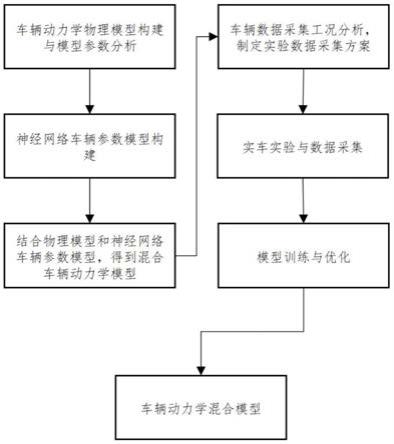
9.图1为本发明流程图;
10.图2为本发明的混合模型示意图;
11.图3为本发明中神经网络车辆参数模型的结构示意图;
12.图4为实施例混合车辆侧向动力学模型架构示意图;
13.图5为实施例混合车辆侧向动力学模型侧向速度输出示意图;
14.图6为实施例混合车辆侧向动力学模型横摆角速度输出示意图。
具体实施方式
15.本实施例涉及一种基于神经网络和物理模型的车辆动力学模拟系统,包括:数据采集模块、数据处理模块、模型训练模块、模型部署模块,其中:数据采集模块在实车实验过程中,采集车辆转向角、纵向速度、侧向速度以及横摆角速度等数据,并对数据进行时间对齐,输出时间对齐后的实车数据;数据处理模块基于混合车辆动力学模型的结构,将对齐后的实车数据按照模型的输入输出格式处理成带有数据标签的训练集;模型训练模块基于训练集对神经网络参数模型进行训练,输出神经网络参数模型;模型部署模块将神经网络参数模型和自行车模型按照混合车辆动力学模型的结构进行模型的生成和部署。
16.如图1所示,为本实施例基于上述系统的车辆动力学模型构建方法,结合神经网络车辆参数模型与车辆动力学物理模型,将神经网络的输出作为车辆动力学模型的参数输入,得到如图4所示的基于神经网络和车辆动力学的混合车辆动力学模型,制定实车实验数据采集方案,经实验完成实车数据采集以训练混合车辆动力学模型。
17.如图3所示,所述的神经网络为前向神经网络,具体包括:输入层、5个隐藏层和输出层,其中:输入层包含12个神经元;每个隐藏层包含10个神经元,采用tanh激活函数;输入层包含2个神经元,采用sigmoid激活函数。
18.所述的前向神经网络的训练样本具体为:车辆在直道和弯道做连续换道过程的车辆状态,每条训练数据是1
×
12维向量,由t,t
‑
10,t
‑
20,t
‑
30时刻的转向角、横摆角速度、纵向速度组成,标签为t时刻的车辆横摆角速度和侧向速度,t表示模型状态输出的当前时刻。
19.本实施例中的训练集由196919条上述训练样本组成。
20.所述的混合车辆动力学模型,具体为:所述的混合车辆动力学模型,具体为:该基础模型的输入为转向角δ
f
,输出为侧向速度v
y
和横摆角速度γ,其中:车辆质量m、轮胎侧偏刚度c
f
和c
r
、车辆质心到前轴中心的距离a、车辆质心到后轴中心的距离b、车辆绕竖轴的转动惯量i、车辆纵向速度v
x
。
21.所述的实车数据采集,具体为:选取车辆连续换道、蛇形等场景作为车辆数据采集的基本工况,车辆换道轨迹、车辆速度,道路曲率充分覆盖车辆模型实际应用工况。采集车辆转向角、纵向速度、侧向速度以及横摆角速度数据。
22.经过具体实际实验,在carsim车辆动力学仿真软件中,对b级跑车进行动力学建模,基于上述方法得到的车辆侧向动力学混合模型,其输出的侧向速度和横摆角速度的仿真结果如图5和图6所示。
23.本实施例基于自行车模型的侧向速度均方根误差为0.1314,横摆角速度均方根误差为0.0167;混合车辆动力学模型的侧向速度均方根误差为0.0303,横摆角速度均方根误差为0.0039。结果表明,本实施例的混合车辆动力学模型对侧向速度和横摆角速度预测误差比现有自行车模型更小。
24.与现有技术相比,本方法能够得到比现有的自行车模型(bicycle model)输出更加接近真实数据(true value)的侧向速度和横摆角速度状态,能够准确预测车辆侧向运动状态,可应用于车辆整车控制器设计,提升汽车稳定性控制性能;同时,也可以用于车辆侧向动力学的仿真测试应用。
25.上述具体实施可由本领域技术人员在不背离本发明原理和宗旨的前提下以不同的方式对其进行局部调整,本发明的保护范围以权利要求书为准且不由上述具体实施所限,在其范围内的各个实现方案均受本发明之约束。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1