用于自动驾驶的目标关联的校验方法及存储介质与流程
1.本发明数据自动驾驶领域,具体涉及用于自动驾驶的目标关联的校验方法。
背景技术:
2.对于自动驾驶,现有技术最大的技术难点是实现对环境的准确感知,而对于感知多传感融合是行业普遍采用的方案。多传感器融合可以充分利用各种传感器的优势,也可以有效克服单传感在某些方面的缺点。例如可以充分利用视觉的目标检测能力,有效减少单雷达噪点,误识别多的问题;可以利用雷达良好的纵向特性弥补视觉在这方面的天然不足。多传感融合需要建立在准确的目标关联上,如果关联不上,就无法发挥各个传感器的作用;而如果关联错误,则可能会引入错误的信息导致目标感知出错。所以目标关联是多传感融合的关键。当前目标关联方法多使用马氏距离来衡量关联的距离,通过获取距离最优得到关联结果。但是在实际的应用中,由于传感观测的噪音较大且无法准确估计,所以单单使用距离最优方法易产生误关联。
3.因此,有必要针对当前多目标关联存在的关联准确度需要进一步提高的需求,开发一种在多传感关联里的关联校验方法,提高关联的准确度。
技术实现要素:
4.本发明公开的用于自动驾驶的目标关联的校验方法及存储介质,利用各个目标以及其各个关联的传感观测的相对几何关系实现对关联关系的校验,从而提高关联的准确度。
5.本发明的技术方案如下:
6.本发明公开的用于自动驾驶的目标关联的校验方法,包括以下步骤,
7.s1:获取关联关系;
8.s2:基于各个目标已经确认的与其它传感的关联和待校验的关联组成的几何关系进行校验;
9.s3:基于各个目标和待校验关联组成的几何关系进行校验;
10.s4:基于各个目标和已经确认的本传感的关联和待校验的关联组成的几何关系进行校验;
11.s5:对校验结果进行统计得到最终校验结果。
12.进一步地,所述步骤s1中待校验的关联关系由前端模块直接提供。
13.进一步地,所述步骤s5中通过统计s2、s3和s4多次校验中通过和不通过的比例来决定最后的校验结果。
14.进一步地,s2中,得到各个目标两两之间确认的其它传感的观测组成的边和对应的本传感的观测组成的边,对对应的两条边进行相识度校验。
15.进一步地,s3中,得到两个待确认关联关系的目标两两之间组成的边和对应的本传感的观测组成的边,然后对对应的两条边进行相似度校验。
16.进一步地,s4中,得到已确认关联的目标和待确认关联的目标两两之间组成的边和对应的本传感的观测组成的边,然后对对应的两条边进行相识度校验。
17.进一步地,统计对于每一个待确认关联中所有相识度校验中通过和不通过的次数,然后通过设置一定的通过比例阈值0.8来决定最终是否检验确认。
18.进一步地,
19.相似度通过两条边的夹角和长度的差异进行评估,具体评估方法如下:
20.假设两条边分别为:edge1=[x1,y1],edge2=[x2,y2];
[0021]
则:
[0022][0023][0024]
dislength=fabs(ledge1
‑
ledge2);
[0025]
disangle=arccos((x1
×
x2+y1
×
y2)/(ledge1
×
ledge2));
[0026]
其中,ledge表示这条边的长度,dislength表示两条边长度的差异,disangle表示两条边角度的差异;设定一定的长度差异阈值和角度差异阈值来决定该校验是否通过。
[0027]
本发明有益技术效果为:通过目标之间,其它传感观测之间,本传感观测之间组成的边的几何关系来校验关联,从相对关系处理,基于该方式能有效改善因为传感器噪声带来的误关联和漏关联。该校验普遍适用于多传感器数据的关联融合。
附图说明
[0028]
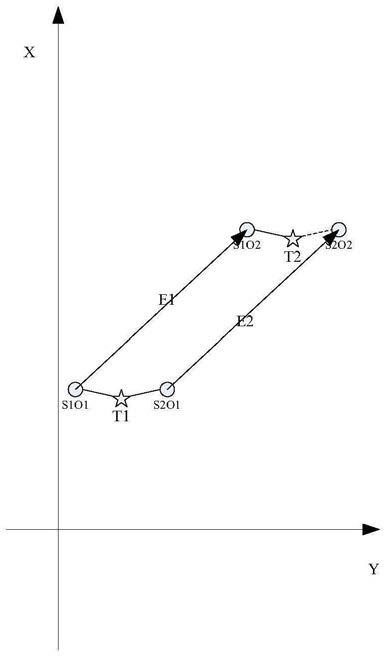
图1为两个目标其它传感确认观测与本传感观测建立的对应边图;
[0029]
图2为两个目标和对应的待验证传感观测建立的对应边图;
[0030]
图3为两个目标和一个确认一个待验证传感观测建立的对应边图。
具体实施方式
[0031]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
[0032]
本实施例中,详细说明用于自动驾驶的目标关联的校验方法,其包括以下步骤,
[0033]
s1:从前端模块获取关联关系;获取待确认的关联、各个目标已经确认的与本传感观测的关联、各个目标已经确认的与其它传感观测的关联;
[0034]
s2:得到各个目标两两之间确认的其它传感的观测组成的边e1和对应的本传感的观测组成的边e2,对对应的两条边进行相识度校验。边在实际应用中用一个向量表示,向量的每个点为目标传感观测的x,y位置。例如假设两个观测输出的x,y位置分别为[x1’,y1’],[x2’,y2’],则边为:
[0035]
edge=[x2
’‑
x1’,y2
’‑
y1’],然后对对应的两条边进行相识度校验。具体如图1所示:其中星号“*”代表目标,圆圈“o”代表观测;图中的snom,sn表示第n个传感器(传感器,sensor),om表示第m个目标(目标,object)。目标和观测之间的连线是实线表示已经确认的关联,虚线表示待校验的关联。
[0036]
s3:得到各个待确认关联关系的目标两两之间组成的边e3和对应的传感观测组成
的边e4,然后对对应的两条边进行相识度校验;具体如图2所示,用于校验的边就是图中的e3和e4;
[0037]
s4:得到各个已确认关联的目标和待确认关联的目标两两之间组成的边e5和对应的本传感的观测组成的边e6,然后对对应的两条边进行相识度校验。具体如图3所示,用于校验的边就是图中的e5和e6。
[0038]
s5:对校验结果进行统计得到最终校验结果。
[0039]
所述步骤s5中通过统计s2、s3和s4多次校验中通过和不通过的比例来决定最后的校验结果。具体为:统计对于每一个待确认关联中所有相识度校验中通过和不通过的次数,然后通过设置一定的通过比例阈值来决定最终是否检验确认,一般阈值设置为0.8。
[0040]
相似度通过两条边的夹角和长度的差异进行评估,具体评估方法如下:
[0041]
假设两条边分别为:edge1=[x1,y1],edge2=[x2,y2];则:
[0042][0043][0044]
dislength=fabs(ledge1
‑
ledge2);
[0045]
disangle=arccos((x1
×
x2+y1
×
y2)/(ledge1
×
ledge2));
[0046]
其中,ledge表示这条边的长度,dislength表示两条边长度的差异,disangle表示两条边角度的差异;设定一定的长度差异阈值和角度差异阈值来决定该校验是否通过。
[0047]
在进一步的实施例中,提出一种可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以上实施例所公开的用于自动驾驶的目标关联的校验方法的步骤。
[0048]
以上结合附图详细描述了本发明实施例的可选实施方式,但是,本发明实施例并不限于上述实施方式中的具体细节,在本发明实施例的技术构思范围内,可以对本发明实施例的技术方案进行多种简单变型,这些简单变型均属于本发明实施例的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1