考虑动态交互的多机并联直流系统控制参数设计方法
1.本发明属于直流配用电系统稳定控制领域,特别考虑一种动态交互的多机并联直流系统控制参数设计方法。
背景技术:
2.随着国民经济的快速发展,直流配用电系统在能源效率、配电容量、配电损耗、建设成本等方面比传统交流配用电系统具有明显的优势,所以直流配用电系统是未来的发展趋势。直流配用电系统中一般只存在恒功率负荷,其负电阻特性使整个直流配用电系统呈现弱阻尼特性;与此同时,大量电力电子装置完全取代传统变压器和发电机,使整个直流配用电系统呈现低惯性特性,造成直流配用电系统容易出现稳定问题。适用于直流配电系统的常规控制参数设计方法通常共包含两步。第一步:基于单台换流器在其独立运行时(简称为单换流器场景)的开环和闭环传递函数,并利用频域分析法设计其控制参数。第二步:基于直流系统的阻抗模型、状态空间矩阵或开关模型,利用数学解析、根轨迹或调试经验等方式再次调整控制参数,使得系统动态达到预期目标。但阻抗模型、状态空间矩阵或开关模型不仅难以直观揭示换流器间动态交互机理,也难以提供控制参数设计所需要的开环传递函数。
3.综上所述,在换流器滤波参数按照电流电压纹波标准进行设计的背景下,为了提高直流配用电系统稳定性,充分发挥直流配用电系统优势,需要一种计及换流器间动态交互的直流配电系统控制参数设计方法。
技术实现要素:
4.为了解决直流配用电系统存在的稳定问题,本发明提出一种考虑动态交互的多机并联直流系统控制参数设计方法,该算法作用于各电压源换流器,能够定性定量设计直流配电系统的动态特性。技术方案如下:
5.一种考虑动态交互的多机并联直流系统控制参数设计方法,包括下列步骤:
6.步骤1:对直流配电系统中各换流器依次进行电流内环的pi控制参数设计,得到各换流器电流内环的比例系数k
pix
和电流内环的积分系数k
iix
,方法如下:
7.基于换流器间动态交互的电流控制环的开环以及闭环传递函数,对直流配电系统中各换流器的电流控制参数进行设计,其中,x=1,2,
…
,n,n为电压源换流器的台数;h=1,2,
…
,m,m为恒功率负荷的个数。
8.根据第x台电压源换流器的输入直流电压v
sx
和输出滤波电感lfx以及直流配电系统的等效滤波电容c
eq
、等效滤波电感l
eq
和等效电阻r
eq
得到第x台电压源换流器的开环传递函数为g
vdx
(s),进而得到第x台电压源换流器电流控制环的开环传递函数为g
idx
(s):
[0009][0010]
其中,p
x
为第x台vsc的功率均分系数;
[0011]
定义第x台电压源换流器的电流控制器gicx(s):
[0012][0013]
其中,k
pix
和k
iix
分别为电流控制器g
icx
(s)的比例系数和积分系数,ω
ilx
为电流控制器g
icx
(s)的积分频率。定义ω
icx
为第x台vsc的电流控制回路增益的穿越频率,而η
ix
则定义为ω
ilx
与ω
icx
间的比值。
[0014]
第x台vsc的电流控制的回路增益t
iix
(s)和闭环传递函数g
iix
(s)分别为
[0015]
t
iix
(s)=g
idx
(s)g
icx
(s)
[0016][0017]
根据穿越频率ω
icx
取值为0.1倍的换流器开关频率,得到电流内环的比例系数k
pix
;然后按照η
ix
取值为0.1,得到电流内环的积分系数k
iix
。
[0018]
步骤2:设计直流配电系统中各换流器电压外环的pi控制参数,得到各换流器电压外环的比例系数k
pvx
和电流内环的积分系数k
ivx
,方法如下:
[0019]
基于换流器间动态交互的电压控制环的开环以及闭环传递函数,对直流配电系统中各换流器的电压控制参数进行设计,计及换流器的电流控制环后,得到第x台电压源换流器的电压控制开环传递函数为g
ivdx
(s):
[0020][0021]
定义第x台电压源换流器的电压控制器g
vcx
(s):
[0022][0023]
其中,k
pvx
和k
ivx
分别为电压控制器g
vcx
(s)的比例系数和积分系数;定义ω
vcx
为第x台vsc的电压控制回路增益的穿越频率,而η
vx
则定义为ω
vlx
与ω
vcx
间的比值。
[0024]
定义g
iv
(s)=(c
eq-1/r
eq
),第x台vsc的电压控制的回路增益t
vivx
(s)和闭环传递函数g
vivx
(s)分别为:
[0025][0026]
根据穿越频率ω
vcx
的取值范围为0.1~0.3倍的ω
icx
,设计电压外环的比例系数k
pvx
;然后按照η
vx
的取值范围可选为0.1~5,设计电压外环的积分系数k
ivx
。
[0027]
步骤3:设计直流配电系统中各换流器的下垂控制参数,方法如下:
[0028]
根据所有恒功率负荷电流i
lx
的累加和i
l
,第x台电压源换流器的下垂系数k
dsx
,计算得到第x台电压源换流器的下垂控制器v
dx
(s),计及换流器的电流控制环、电压控制环和下垂控制环后,得到第x台换流器的电压控制闭环传递函数g
vivrx
(s),将系统内所有换流器的闭环传递函数g
vivrx
(s)进行累加,并将其累加和定义为传递函数g
vivrsys
(s)。
附图说明
[0029]
图1为直流配用电系统仿真拓扑结构;
[0030]
图2为电压源换流器的电流控制参数设计流程;
[0031]
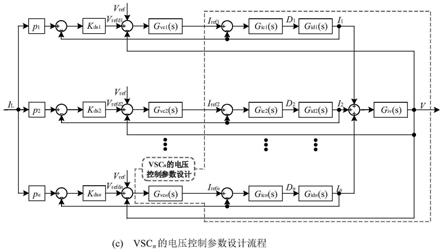
图3为电压源换流器的电压控制参数的设计流程;
[0032]
图4为场景1、场景2和场景3的波特图。
[0033]
图5为场景1、场景2和场景3的零极点图;
[0034]
图6为场景1、场景2和场景3的直流母线电压波形;
具体实施方式
[0035]
以下将结合附图及具体实施,对本发明提出的考虑动态交互的多机并联直流系统控制参数设计方法进行详细说明。
[0036]
(1)以图1所示的直流配电系统为例,本方法逐步建立计及换流器间动态交互的开环和闭环传递函数,首先是各换流器的电流控制环节。对直流配电系统中各换流器依次进行电流内环的pi控制参数设计,得到各换流器电流内环的比例系数k
pix
和电流内环的积分系数k
iix
。
[0037]
基于换流器间动态交互的电流控制环的开环以及闭环传递函数,对直流配电系统中各换流器的电流控制参数进行设计,其中,x=1,2,
…
,n,n为电压源换流器的台数;h=1,2,
…
,m,m为恒功率负荷的个数。根据第x台电压源换流器的输入直流电压v
sx
和输出滤波电感lfx以及直流配电系统的等效滤波电容c
eq
、等效滤波电感l
eq
和等效电阻r
eq
得到第x台电压源换流器的开环传递函数为g
vdx
(s),进而得到第x台电压源换流器电流控制环的开环传递函数为g
idx
(s),详情如下公式所示
[0038][0039]
其中,p
x
为第x台vsc的功率均分系数,并存在∑p
x
=1成立;定义g
iv
(s)=(c
eq-1/r
eq
)。相对于单换流器场景时电流控制环的开环传递函数而言,传递函数g
idx
(s)计及了系统中各换流器间动态交互:不仅计及了第x台vsc的滤波参数,还计及了其他vsc的滤波参数。
[0040]
定义第x台电压源换流器的电流控制器gicx(s)
[0041][0042]
其中,k
pix
和k
iix
分别为电流控制器g
icx
(s)的比例系数和积分系数,ω
ilx
为电流控制器g
icx
(s)的积分频率。定义ω
icx
为第x台vsc的电流控制回路增益的穿越频率,而η
ix
则定义为ω
ilx
与ω
icx
间的比值。第x台vsc的电流控制的回路增益t
iix
(s)和闭环传递函数g
iix
(s)分别为
[0043]
t
iix
(s)=g
idx
(s)g
icx
(s)
[0044][0045]
根据穿越频率ω
icx
取值为0.1倍的换流器开关频率,得到电流内环的比例系数k
pix
;然后按照η
ix
取值为0.1,得到电流内环的积分系数k
iix
。
[0046]
(2)设计直流配电系统中各换流器电压外环的pi控制参数,得到各换流器电压外环的比例系数k
pvx
和电流内环的积分系数k
ivx
。
[0047]
基于换流器间动态交互的电压控制环的开环以及闭环传递函数,对直流配电系统中各换流器的电压控制参数进行设计。计及换流器的电流控制环后,得到第x台电压源换流器的电压控制开环传递函数为g
ivdx
(s),详情如下公式所示
[0048][0049]
定义第x台电压源换流器的电压控制器g
vcx
(s)
[0050][0051]
其中,k
pvx
和k
ivx
分别为电压控制器g
vcx
(s)的比例系数和积分系数。定义ω
vcx
为第x台vsc的电压控制回路增益的穿越频率,而η
vx
则定义为ω
vlx
与ω
vcx
间的比值。
[0052]
第x台vsc的电压控制的回路增益t
vivx
(s)和闭环传递函数g
vivx
(s)分别为
[0053][0054]
按照直流配电系统中各换流器的编号顺序,依次设计各换流器电压外环的pi控制参数(各换流器的先后设计顺序对最终结果无影响):首先设计第1台换流器电压外环的pi控制参数,详情如图3(a)所示;然后设计第2台换流器电压外环的pi控制参数,详情如图3(b)所示;按此顺序,最后设计第n台换流器电压外环的pi控制参数,详情如图3(c)所示。下面以第x台换流器为例,详细介绍其电压控制参数的推荐设计方案。根据穿越频率ω
vcx
的取值范围可选为0.1~0.3倍的ω
icx
,设计电压外环的比例系数k
pvx
;然后按照η
vx
的取值范围可选为0.1~5,设计电压外环的积分系数k
ivx
。
[0055]
(3)设计直流配电系统中各换流器的下垂控制参数,设计系统动态特性。
[0056]
根据所有恒功率负荷电流i
lx
的累加和i
l
,第x台电压源换流器的下垂系数k
dsx
,计算得到第x台电压源换流器的下垂控制器v
dx
(s)表达式为
[0057]vdx
(s)=k
dsx
(i
x-i
l
p
x
)=kc
eq
sv=k
dxv[0058]
计及换流器的电流控制环、电压控制环和下垂控制环后,得到第x台换流器的电压控制闭环传递函数g
vivrx
(s)表达式为
[0059][0060]
将系统内所有换流器的闭环传递函数g
vivrx
(s)进行累加,并将其累加和定义为传递函数g
vivrsys
(s),通过实现部分零极点的相互抵消(目的就是简化频率模型),利用一对共轭主导极点将高阶系统近似地看做二阶系统来分析,准确设计系统动态特性。
[0061]
为验证本发明所提出的考虑动态交互的多机并联直流系统控制参数设计方法的有效性,以系统参数如下表所示的直流配电系统为例,开展直流配电系统控制参数的理论设计及仿真验证工作。以下介绍所建传递函数及所提控制参数设计方法的系统振荡频率宽
范围设计能力,详情如场景1、场景2和场景3所示
[0062]
直流配电系统参数
[0063][0064][0065]
由图4可知,,场景1、场景2和场景3的传递函数t
viv1
(s)的穿越频率f
vc1
,会随着f
vcx
预设值(分别为10hz、30hz和40hz)的增大而逐渐增大(分别为16.5hz、42.3hz和53.1hz)。在很多研究文献中η
vx
通常取值为0.1,而本专利想要通过部分零极点的相互抵消,进一步达到仅由一对共轭极点就能描述直流配电系统动态特性的目的。所以在本文中η
vx
取值为1或1.25,这也就是图4中f
vcx
实际值不等于其预设值的原因所在。由图5可知,正是由于部分零极点的相互抵消(虽然部分零极点相近但不完全相等,但消去此对零极点对模型准确度产生的影响可以被忽略),场景1、场景2和场景3的系统振荡频率fs均可分别由其一对共轭极点计算得到,分别为10.5hz、36.3hz和48.9hz。
[0066]
为验证上述振荡频率理论设计的有效性,在plecs仿真软件对场景1、场景2和场景3进行了时域仿真,直流母线电压波形如图6所示。图6中,场景1、场景2和场景3的直流母线电压时域振荡频率分别为10.39hz、33.46hz和47.06hz,均与图5中的理论设计值基本一致。
[0067]
综上所述,本发明所提出的考虑动态交互的多机并联直流系统控制参数设计方法能够为计及约束条件(换流器占空比饱和、电缆线路引入的系统固有振荡频率等约束)的直流配电系统全局最优目标设计提供便利。
[0068]
最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明的权利要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1