基于货架期预测和成熟度判别的番茄采摘装置及其使用方法
1.本发明属于番茄种植技术领域,具体涉及基于货架期预测和成熟度判别的番茄采摘装置及其使用方法。
背景技术:
2.番茄采摘是番茄生产过程中的重要一环,传统的番茄采摘依靠大量人力,耗费的采摘成本很大,人工采摘的番茄成熟度也会有所差异,在上市期间部分番茄的成熟度并不是最佳的。
3.目前,番茄的采摘装置研究较多,主要依靠机器视觉判别番茄成熟度,控制机械臂进行采摘,对于未成熟的番茄并不能确保在合适的时候采摘,不能确保上市期间番茄口感和成熟度最优,影响番茄种植过程中的经济效益。
技术实现要素:
4.本发明所要解决的技术问题在于针对上述现有技术的不足,提供基于货架期预测和成熟度判别的番茄采摘装置及其使用方法,以解决上述背景技术中提出的问题。
5.为解决上述技术问题,本发明采用的技术方案是:基于货架期预测和成熟度判别的番茄采摘装置,包括车体,所述车体上固定有支架,所述支架上安装有微型计算机、图像采集器、和测距雷达;
6.所述图像采集器采集番茄的果实图像数据,然后将其传送至微型计算机内,微型计算机获取设施番茄图像数据后并进行预处理,即基于深度学习方法识别出番茄果实的成熟度;
7.采集番茄的影响因子数据,所述影响因子包括果实成熟度、果实硬度和温度,将所述影响因子数据进行预处理后输入至番茄货架期预测模型,输出预测的番茄货架期,所述番茄货架期预测模型根据所述影响因子和所述影响因子对应的番茄货架期进行训练后得到,通过番茄果实的成熟度以及其货架期反推番茄最佳采摘时间完成果实成熟度的判别预测;
8.所述车体上还固定有果实收集箱,所述果实收集箱上通过转轴活动连接有采摘器,所述采摘器的控制器也与微型计算机之间信号连接,当微型计算机判断番茄果实成熟时,通过控制采摘器将成熟的番茄果实采摘到果实收集箱内。
9.优选的,所述深度学习方法采用alexnet卷积神经网络,包含5个卷积层和3个全连接,其中第一卷积层、第二卷积层、第五卷积层后接一个最大池化层。
10.优选的,所述微型计算机判别预测果实成熟度包括以下步骤:
11.s101、先通过图像采集器进行番茄果实图像数据的获取,并将其传送至微型计算机内;
12.s102、微型计算机对得到的图像数据进行预处理,预处理后的数据按照7:3分为训练数据和测试数据;
13.s103、构建alexnet神经网络模型,使用训练数据集对alexnet神经网络模型进行训练;
14.s104、根据完成训练的alexnet神经网络模型完成番茄果实成熟度的判别预测。
15.优选的,所述番茄货架期预测包括以下步骤:
16.s201、先通过采集器进行番茄影响因子数据的获取,并将其传送至微型计算机3内;
17.s202、微型计算机3对得到的数据进行预处理,预处理后的数据按照7:3分为训练数据和测试数据;
18.s203、构建lstm神经网络模型,使用训练数据集对lstm神经网络模型进行训练;
19.s204、根据完成训练的lstm神经网络模型完成番茄货架期的预测。
20.优选的,所述图像数据进行预处理具体为使用minmaxscaler公式:
[0021][0022]
其中,x*表示归一化后的数据,x
max
表示数据的最大值,x
min
表示数据的最小值;
[0023]
将所有数据归一化到0~1之间,完成图像数据的预处理。
[0024]
优选的,所述lstm神经网络模型包括一个输入层、一个lstm细胞层、一个输出层;
[0025]
lstm递归循环神经网络的前向传播函数为:
[0026]i《t》
=σ(w
xi
x
《t》
+w
hih《t-1》
+w
cic《t-1》
+bi)
[0027]f《t》
=σ(w
xf
x
《t》
+w
hfh《t-1》
+w
cfc《t-1》
+bf)
[0028]c《t》
=f
tc《t-1》
+i
t
tanh(w
xc
x
《t》
+w
hch《t-1》
+bc)
[0029]o《t》
=σ(w
xo
x
《t》
+w
hoh《t-1》
+w
coc《t》
+bo)
[0030]h《t》
=o
《t》
tanh(c
《t》
)
[0031]
其中,i
《t》
表示输入门、f
《t》
表示遗忘门、c
《t》
表示t时刻经过输入门和遗忘门后的细胞单元状态、o
《t》
表示t时刻输出门的细胞单元状态、h
《t》
表示t时刻lstm单元的所有输出状态;
[0032]
w表示权重矩阵;b表示偏置项;sigmoid表示激活函数,其作用是将变量映射至区间[0,1]中。
[0033]
优选的,所述训练数据集对lstm神经网络模型训练包含如下步骤:
[0034]
s301、按照lstm递归循环神经网络的前向传播函数公式计算lstm细胞的输出值;
[0035]
s302、在时间和网络层级两个方向上计算每个lstm细胞的误差项;包括按时间和网络层级2个反向传播方向;使用均方根误差rmse作为误差计算公式,来更新模型参数;
[0036][0037]
其中:l(m-l)为训练的样本总数;pi为预测值;yi为真实值;
[0038]
s303、按照相应的误差项,计算每个权重的梯度;
[0039]
s04、选用基于梯度的优化算法更新权重,采用随机梯度下降算法更新lstm模型中
的权重和偏置,即可完成lstm神经网络模型训练。
[0040]
优选的,所述支架上还设置有辅助照明灯,所述图像采集器具体为广视角球状摄像头,果实收集箱具体为顶端敞口的开口箱。
[0041]
基于货架期预测和成熟度判别的番茄采摘装置的其使用方法,包括以下步骤:
[0042]
s401、利用车体带动图像采集器至预设位置,对预设处的番茄果实的图像信息进行采集;
[0043]
s402、通过图像采集器采集到的数据传送至微型计算机内,通过微型计算机完成果实成熟度的判别预测;
[0044]
s403、当微型计算机判断番茄果实成熟时,通过控制采摘器将成熟的番茄果实采摘到果实收集箱内,完成番茄果实采摘作业。
[0045]
本发明与现有技术相比具有以下优点:
[0046]
本发明通过设置为微型计算机信号连接的图像采集器,利用图像采集器获取番茄果实的图像数据,再利用微型计算机对得到的图像数据进行预处理,预处理后的数据按照7:3分为训练数据和测试数据,使用训练数据集对构建的lstm神经网络模型进行训练;根据完成训练的lstm神经网络模型完成番茄果实成熟度的判别预测,运用lstm神经网络模型做时间序列预测确定番茄果实个体最佳采摘时间,确保设施番茄果实在上市期间成熟度和口感最佳,一定程度上提高番茄采摘效率和种植的经济效益。
附图说明
[0047]
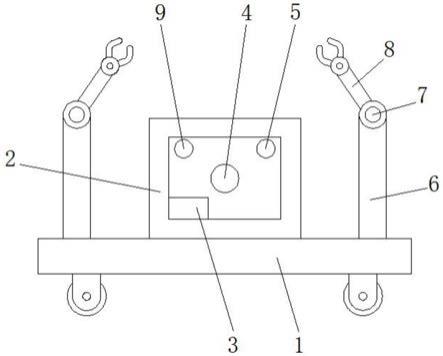
图1是本发明整体结构分解图;
[0048]
附图标记说明:
[0049]
1-车体;2-支架;3-微型计算机;4-图像采集器;5-测距雷达;6-果实收集箱;7-转轴;8-采摘期;9-辅助照明灯。
具体实施方式
[0050]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0051]
实施例1,如图1所示,本发明提供一种技术方案:一种基于货架期预测和果实成熟度判别的设施番茄采摘装置,其特征在于,包括车体1,车体1为能自动控制的板车,用于配合图像采集器4完成不同位置的番茄果实图像的采集。
[0052]
所述车体1上固定有支架2,所述支架2上安装有微型计算机3、图像采集器4、和测距雷达5;
[0053]
测距雷达5配合微型计算机3进行车体1位置的移动以及与番茄果实之间间距的测量,便于配合图像采集器4进行图像采集工作。
[0054]
图像采集器4具体为广视角球状摄像头,通过图像采集器4采集番茄的果实图像数据,然后将其传送至微型计算机3内,完成果实成熟度的判别预测并根据其货架期反推最佳采摘时间。
[0055]
具体为所述图像采集器4采集番茄的果实图像数据,然后将其传送至微型计算机3内,微型计算机3获取设施番茄图像数据后并进行预处理,即基于深度学习方法识别出番茄果实的成熟度;
[0056]
采集番茄的影响因子数据,所述影响因子包括果实成熟度、果实硬度和温度,将所述影响因子数据进行预处理后输入至番茄货架期预测模型,输出预测的番茄货架期,所述番茄货架期预测模型根据所述影响因子和所述影响因子对应的番茄货架期进行训练后得到,通过番茄果实的成熟度以及其货架期反推番茄最佳采摘时间完成果实成熟度的判别预测;
[0057]
所述车体1上还固定有果实收集箱6,所述果实收集箱6上通过转轴7活动连接有采摘器8,所述采摘器8的控制器也与微型计算机3之间信号连接,当微型计算机3判断番茄果实成熟时,通过控制采摘器8将成熟的番茄果实采摘到果实收集箱6内。
[0058]
所述深度学习方法采用alexnet卷积神经网络,包含5个卷积层和3个全连接,其中第一卷积层、第二卷积层、第五卷积层后接一个最大池化层。
[0059]
所述微型计算机3判别预测果实成熟度包括以下步骤:
[0060]
s101、先通过图像采集器4进行番茄果实图像数据的获取,并将其传送至微型计算机3内;
[0061]
s102、微型计算机3对得到的图像数据进行预处理,预处理后的数据按照7:3分为训练数据和测试数据;
[0062]
s103、构建alexnet神经网络模型,使用训练数据集对alexnet神经网络模型进行训练;
[0063]
s104、根据完成训练的alexnet神经网络模型完成番茄果实成熟度的判别预测。
[0064]
所述番茄货架期预测包括以下步骤:
[0065]
s201、先通过采集器进行番茄影响因子数据的获取,并将其传送至微型计算机3内;
[0066]
s202、微型计算机3对得到的数据进行预处理,预处理后的数据按照7:3分为训练数据和测试数据;
[0067]
s203、构建lstm神经网络模型,使用训练数据集对lstm神经网络模型进行训练;
[0068]
s204、根据完成训练的lstm神经网络模型完成番茄货架期的预测。
[0069]
所述图像数据进行预处理具体为使用minmaxscaler公式:
[0070][0071]
其中,x*表示归一化后的数据,x
max
表示数据的最大值,x
min
表示数据的最小值;
[0072]
将所有数据归一化到0~1之间,完成图像数据的预处理。
[0073]
所述lstm神经网络模型包括一个输入层、一个lstm细胞层、一个输出层;
[0074]
lstm递归循环神经网络的前向传播函数为:
[0075]i《t》
=σ(w
xi
x
《t》
+w
hih《t-1》
+wcc
《t-1》
+bi)
[0076]f《t》
=σ(w
xf
x
《t》
+w
hfh《t-1》
+w
cfc《t-1》
+bf)
[0077]c《t》
=f
tc《t-1》
+i
t
tanh(w
xc
x
《t》
+w
hch《t-1》
+bc)
[0078]o《t》
=σ(w
xo
x
《t》
+w
hoh《t-1》
+w
coc《t》
+bo)
[0079]h《t》
=o
《t》
tanh(c
《t》
)
[0080]
其中,i
《t》
表示输入门、f
《t》
表示遗忘门、c
《t》
表示t时刻经过输入门和遗忘门后的细胞单元状态、o
《t》
表示t时刻输出门的细胞单元状态、h
《t》
表示t时刻lstm单元的所有输出状态;
[0081]
w表示权重矩阵;b表示偏置项;sigmoid表示激活函数,其作用是将变量映射至区间[0,1]中。
[0082]
所述训练数据集对lstm神经网络模型训练包含如下步骤:
[0083]
s301、按照lstm递归循环神经网络的前向传播函数公式计算lstm细胞的输出值;
[0084]
s302、在时间和网络层级两个方向上计算每个lstm细胞的误差项;包括按时间和网络层级2个反向传播方向;使用均方根误差rmse作为误差计算公式,来更新模型参数;
[0085][0086]
其中:l(m-l)为训练的样本总数;pi为预测值;yi为真实值;
[0087]
s303、按照相应的误差项,计算每个权重的梯度;
[0088]
s04、选用基于梯度的优化算法更新权重,采用随机梯度下降算法更新lstm模型中的权重和偏置,即可完成lstm神经网络模型训练。
[0089]
所述车体1上还固定有果实收集箱6,果实收集箱6具体为顶端敞口的开口箱所述果实收集箱6上通过转轴7活动连接有采摘器8,采摘器8为现有的自动化控制的机械采摘手,所述采摘器8的控制器也与微型计算机3之间信号连接;
[0090]
当微型计算机3判断番茄果达到最佳采摘时间时,通过控制采摘器8将成熟的番茄果实采摘到果实收集箱6内。
[0091]
所述支架2上还设置有辅助照明灯9,所述图像采集器4具体为广视角球状摄像头。
[0092]
实施例2,基于货架期预测和成熟度判别的番茄采摘装置的其使用方法,包括以下步骤:
[0093]
s401、利用车体1带动图像采集器4至预设位置,对预设处的番茄果实的图像信息进行采集;
[0094]
s402、通过图像采集器4采集到的数据传送至微型计算机3内,通过微型计算机3完成果实成熟度的判别预测;
[0095]
s403、当微型计算机3判断番茄果实成熟时,通过控制采摘器8将成熟的番茄果实采摘到果实收集箱6内,完成番茄果实采摘作业。
[0096]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0097]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以
理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1