车载AR-HUD的标定方法与流程
车载ar-hud的标定方法
技术领域
1.本发明属于增强现实显示方法的技术领域,尤其涉及一种车载 ar-hud的标定方法。
背景技术:
2.增强现实平视显示器(augmented reality head up display, arhud),是目前运用在乘用车上的驾驶辅助设备。可以将车速、转速、导航以及故障告警等提示信息显示在驾驶员前方平视范围内,并与周围实景相结合,降低驾驶员低头观察仪表的频率以提高驾驶安全性,同时提升驾驶员对周围环境的感知。
3.由于ar-hud不具备类似摄像头的图像捕捉能力,无法直接获取投射在显示表面的投影图像,所以不能通过不同图像空间的像素对应关系来直接计算二维投影空间坐标与世界坐标系中三维空间像素坐标的对应关系。
4.目前对单独的摄像头标定计算的研究已经较为成熟,例如张正友标定法,通过计算得到的摄像头内部参数对摄像头进行相机标定,在投影几何校正系统中使用这个标定后的摄像头实时获取图像。但是对于ar-hud系统的标定,仍然没有一个成熟的算法可以有效且精确的计算出ar-hud得内部标定参数。
5.由于不同车型的尺寸和摄像头安装为主不同,同,因此需要对 ar-hud的标定进行调整,满足不同场景需求。
6.有鉴于此,特提出本发明。
技术实现要素:
7.本发明的目的在于提供一种车载ar-hud的标定方法,提供一种计算车载ar-hud的标定系数的方法,汽车是否偏航的显示做理论基础。本案的技术方案有诸多技术有益效果,见下文介绍:
8.提供一种车载ar-hud的标定方法,所述方法包括:
9.在真实场景中预设间距放置多个标定参照物;
10.实测待标定汽车上安装的摄像头至每个所述标定参照物的距离,确定每个所述标定参照物在世界坐标系中的坐标,即为,世界坐标;
11.ar-hud启动,显示每个所述标定参照物在ar-hud的投屏画面中位置,确定所述ar-hud的投屏画面中标定特征图像中每个所述标定参照物的像素坐标,即为,像素坐标;
12.根据所述世界坐标和像素坐标确定车载ar-hud的标定系数。
13.在一个优选或可选的实施方式中,所述待标定汽车多个不同车型,且安装有ar-hud,确定每个车型的车载ar-hud的标定系数。
14.在一个优选或可选的实施方式中,根据所述世界坐标和像素坐标确定车载ar-hud的标定系数的方法包括,
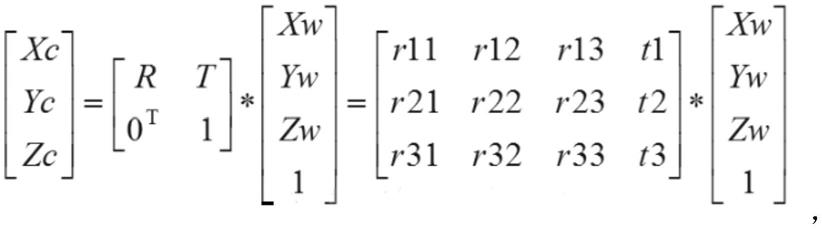
15.所述世界坐标和像素坐标满足:
[0016][0017]
其中,xc、yc和zc为多个所述标定参照物在世界坐标中的坐标,xw、yw和zw为多个所述标定参照物在像素坐标中的坐标;
[0018]
多个所述标定参照物在世界坐标中的坐标和在像素坐标中的坐标反推车载ar-hud的标定系数r和t。
[0019]
在一个优选或可选的实施方式中,所述世界坐标和像素坐标满足满足张正友相机标定法。
[0020]
与现有技术相比,本发明提供的技术方案包括以下有益效果:
[0021]
本案的方法,通过实际测量摄像头至标定为的距离,生成世界坐标,并利用ar-hud启动生成的像素坐标,对车载ar-hud进行校验。空间坐标参数转换算法能够解决:车道偏离告警(ldw lane departurewarning)的ar显示,即根据汽车前视摄像头提供的车道线世界坐标,求取ar-hud画面上的像素坐标,绘制ar告警符,与真实车道线贴合。
具体实施方式
[0022]
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0023]
本发明提供车载ar-hud的标定方法,所述方法包括:
[0024]
s101:在真实场景中预设间距放置多个标定参照物,例如,形状相同的水瓶,箱子或球状物等。
[0025]
s102:实测待标定汽车上安装的摄像头至每个标定参照物的距离,确定每个标定参照物在世界坐标系中的坐标,即为,世界坐标。通过红外测量装置,测量摄像头至每个标定参照物的实际距离,包括x、 y和z方向距离,或是x和y方向上的距离,以摄像头为坐标原点,通过现有技术中的坐标参数求解软件进行世界坐标的标定。
[0026]
s103:ar-hud启动,显示每个标定参照物在ar-hud的投屏画面中位置,确定ar-hud的投屏画面中标定特征图像中每个标定参照物的像素坐标,即为,像素坐标。例如,投屏画面有多个坐标格,获取标定参照物在投屏画面的格子位置确定其坐标。
[0027]
s104:根据世界坐标和像素坐标确定车载ar-hud的标定系数。世界坐标和像素坐标满足满足张正友相机标定法,世界坐标和像素坐标满足:
[0028][0029]
其中,xc、yc和zc为多个标定参照物在世界坐标中的坐标,xw、yw和 zw为多个标定参照物在像素坐标中的坐标;
[0030]
多个标定参照物在世界坐标中的坐标和在像素坐标中的坐标反推车载ar-hud的标定系数r和t,如,根据矩阵求解的方法计算车载ar-hud的标定系数r和t。
[0031]
上述的,待标定汽车多个不同车型,且安装有ar-hud,通过上述的方法能够确定每个车型的车载ar-hud的标定系数。以形成总数据,根据不同车型号可进行坐标的输出。
[0032]
车载ar-hud的标定系数r和t为汽车零部件arhud的软件中的算法重要参数,实现虚实结合(即增强显示ar)的特征。arhud的软件可称为ar creator,将车载ar-hud的标定系数r和t输入该软件中,进行车道偏离告警(ldw lane departure warning)的ar显示, 即根据汽车前视摄像头提供的车道线世界坐标,求取ar-hud画面上的像素坐标,绘制ar告警符,与真实车道线贴合。
[0033]
以上对本发明所提供的产品进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离发明创造原理的前提下,还可以对发明进行若干改进和修饰,这些改进和修饰也落入发明权利要求的保护范围。
技术特征:
1.一种车载ar-hud的标定方法,其特征在于,所述方法包括:在真实场景中预设间距放置多个标定参照物;实测待标定汽车上安装的摄像头至每个所述标定参照物的距离,确定每个所述标定参照物在世界坐标系中的坐标,即为,世界坐标;ar-hud启动,显示每个所述标定参照物在ar-hud的投屏画面中位置,确定所述ar-hud的投屏画面中标定特征图像中每个所述标定参照物的像素坐标,即为,像素坐标;根据所述世界坐标和像素坐标确定车载ar-hud的标定系数。2.根据权利要求1所述的方法,其特征在于,所述待标定汽车多个不同车型,且安装有ar-hud,确定每个车型的车载ar-hud的标定系数。3.根据权利要求1所述的方法,其特征在于,根据所述世界坐标和像素坐标确定车载ar-hud的标定系数的方法包括,所述世界坐标和像素坐标满足:其中,x
c
、y
c
和z
c
为多个所述标定参照物在世界坐标中的坐标,x
w
、y
w
和z
w
为多个所述标定参照物在像素坐标中的坐标;多个所述标定参照物在世界坐标中的坐标和在像素坐标中的坐标反推车载ar-hud的标定系数r和t。4.根据权利要求3所述的方法,其特征在于,所述世界坐标和像素坐标满足满足张正友相机标定法。5.根据权利要求1所述的方法,其特征在于,确定每个所述标定参照物在世界坐标系中的坐标的方法包括:以摄像头为坐标原点,通过坐标参数求解软件进行世界坐标的标定。6.根据权利要求3所述的方法,其特征在于,根据矩阵求解的方法计算车载ar-hud的标定系数r和t。
技术总结
本发明的车载AR-HUD的标定方法,属于增强现实显示方法的技术领域。该方法包括在真实场景中预设间距放置多个标定参照物;实测待标定汽车上安装的摄像头至每个所述标定参照物的距离,确定每个所述标定参照物在世界坐标系中的坐标;AR-HUD启动,显示每个所述标定参照物在AR-HUD的投屏画面中位置,确定所述AR-HUD的投屏画面中标定特征图像中每个所述标定参照物的像素坐标,即为,像素坐标,根据所述世界坐标和像素坐标确定车载AR-HUD的标定系数。HUD的标定系数。
技术研发人员:郭伟 张哲源 朱旻
受保护的技术使用者:中国航空工业集团公司洛阳电光设备研究所
技术研发日:2021.11.23
技术公布日:2022/4/12
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1