一种标定方法、装置、电子设备及存储介质与流程
本技术涉及计算机视觉领域,具体涉及一种标定方法、装置、电子设备及存储介质。
背景技术:
1、近年来,智能辅助驾驶系统越来越多的被应用在改善交通信息安全方面,通过车载视觉传感器捕捉到的二维图像信息获得三维真实世界中的信息成为汽车驾驶安全辅助系统实现的基础,视觉传感器参数标定是计算机视觉系统中的关键技术之一,即搭载车载视觉传感器的汽车在行驶过程中,视觉传感器的外部参数可能会由于转弯偏离、刹车过度、道路颠簸、车体碰撞等原因发生变化,这时则需重新标定。
2、然而,在实际使用过程中,现有标定方法一般采用对沿直线行驶时的图像进行处理从而标定视觉传感器外参,标定精度低且鲁棒性差,因此,亟需一种能够解决现有标定方法标定精度低、鲁棒性差等问题的标定方法。
技术实现思路
1、本技术实施例提供一种标定方法、装置、电子设备及存储介质,可以提升视觉传感器外参标定的精度以及鲁棒性。
2、本技术实施例提供一种标定方法,包括:
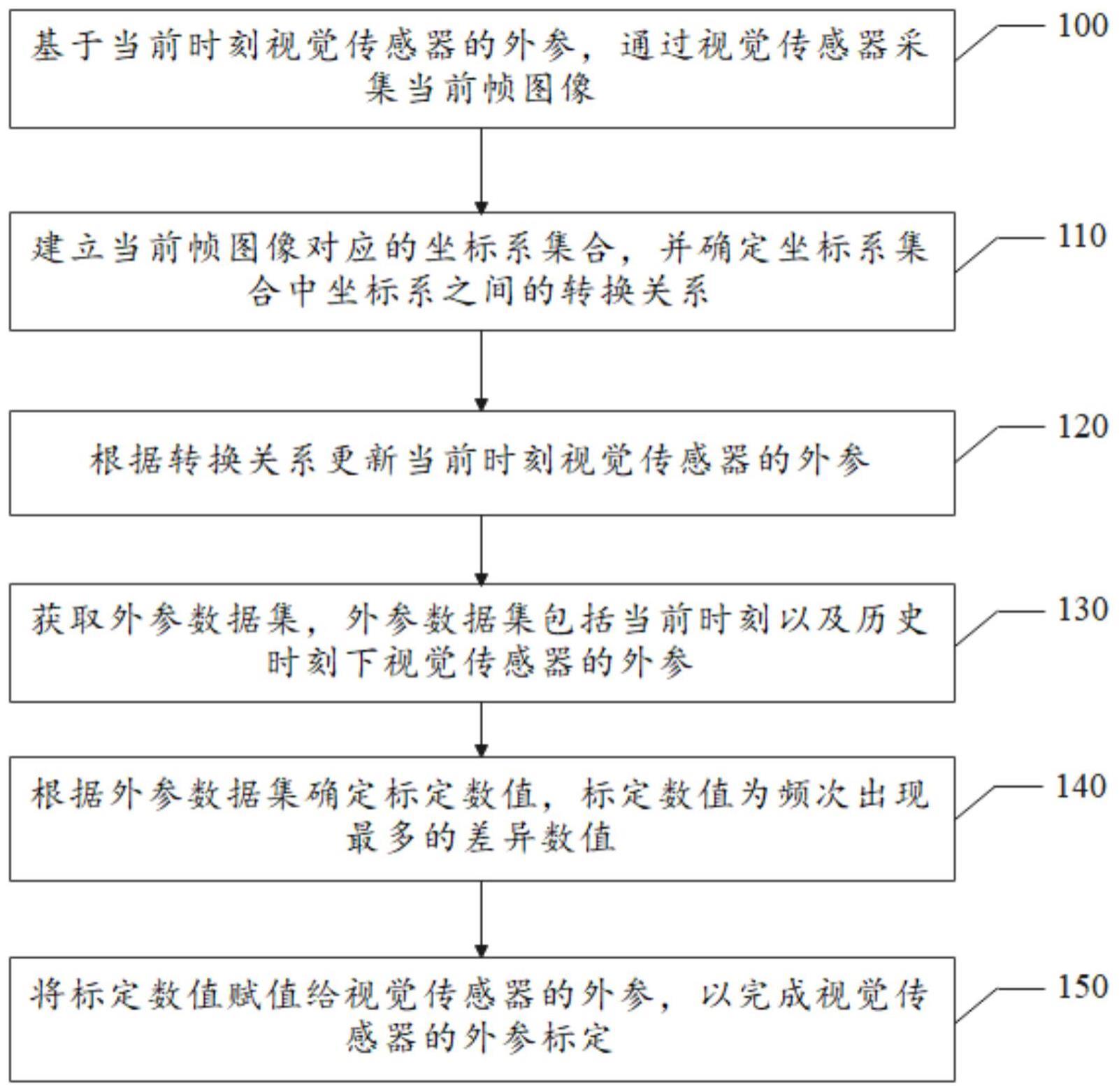
3、基于当前时刻视觉传感器的外参,通过视觉传感器采集当前帧图像;
4、建立当前帧图像对应的坐标系集合,并确定坐标系集合中坐标系之间的转换关系;
5、根据转换关系更新当前时刻视觉传感器的外参;
6、获取外参数据集,外参数据集包括当前时刻以及历史时刻下视觉传感器的外参,历史时刻包括当前时刻之前的时刻;
7、根据外参数据集确定标定数值,标定数值为频次出现最多的差异数值;差异数值为视觉传感器的外参对应的不同数值;
8、将标定数值赋值给视觉传感器的外参,以完成视觉传感器的外参标定。
9、本技术实施例还提供一种标定装置,包括:
10、图像采集单元,用于基于当前时刻视觉传感器的外参,通过所述视觉传感器采集当前帧图像;
11、坐标系建立单元,用于建立所述当前帧图像对应的坐标系集合,并确定所述坐标系集合中坐标系之间的转换关系;
12、外参更新单元,用于根据所述转换关系更新当前时刻所述视觉传感器的外参;
13、数据集获取单元,用于获取外参数据集,所述外参数据集包括当前时刻以及历史时刻下所述视觉传感器的外参,所述历史时刻包括当前时刻之前的时刻;
14、标定数值确定单元,用于根据所述外参数据集确定标定数值,所述标定数值为频次出现最多的差异数值;所述差异数值为所述视觉传感器的外参对应的不同数值;
15、外参标定完成单元,用于将所述标定数值赋值给所述视觉传感器的外参,以完成所述视觉传感器的外参标定。
16、在一些实施例中,外参更新单元包括外参更新子单元,外参更新子单元用于
17、对当前帧图像中的车道线进行特征点识别,得到车道线特征点的标记图像,车道线特征点的标记图像包括车道线特征点;
18、获取坐标系集合中像素坐标系与世界坐标系之间的转换关系;
19、根据转换关系将所述像素坐标系下的标记图像转换到世界坐标系下的第一预设平面,获得车道线特征点转换图,车道线特征点转换图包括转换后的车道线特征点;
20、对车道线特征点转换图中转换后的车道线特征点进行特征点筛选,得到第一特征点筛选图,第一特征点筛选图包括筛选后的特征点;
21、根据筛选后的特征点进行拟合,得到当前行驶车道对应的车道线;
22、当当前行驶车道对应的车道线之间相互平行时,计算当前行驶车道对应的车道线与第一特征点筛选图的第一坐标轴之间的车道线夹角;
23、将车道线夹角作为当前时刻标定的视觉传感器偏航角。
24、在一些实施例中,外参更新子单元包括车道线拟合单元,车道线拟合单元用于:
25、确定视觉传感器的光轴在第一特征点筛选图中对应的光轴坐标,光轴坐标包括第二坐标;
26、根据第二坐标对第一特征点筛选图划分区域;
27、确定区域中每条车道线对应的第一特征点和第二特征点;
28、获取第一特征点与第二特征点之间的长度;
29、将第一特征点与第二特征点车道线连接成直线;
30、确定直线在第一特征点筛选图中的斜率;
31、当第一特征点与第二特征点之间的长度大于预设长度、且直线在第一特征点筛选图中的斜率大于预设斜率时,获得区域对应的车道线;区域对应的车道线包括第一特征点与第二特征点;
32、将区域对应的车道线作为当前行驶车道对应的车道线。
33、在一些实施例中,外参更新子单元还包括俯仰角更新单元,俯仰角更新单元用于:
34、当当前行驶车道对应的车道线之间相互不平行时,获取当前行驶车道对应的车道线之间的第一交点;
35、确定第一特征点筛选图的原点;
36、确定第一交点至第一特征点筛选图的原点之间的第一距离;
37、根据第一距离设置俯仰角步长;
38、根据俯仰角步长调整当前时刻视觉传感器的外参中的俯仰角,获得调整后的视觉传感器俯仰角;
39、将调整后的视觉传感器俯仰角作为当前时刻标定的视觉传感器俯仰角。
40、在一些实施例中,俯仰角更新单元还包括俯仰角更新子单元,俯仰角更新子单元用于:
41、基于调整后的视觉传感器俯仰角,通过视觉传感器采集下一时刻新的第一图像;
42、确定第一图像对应的第二特征点筛选图;
43、确定第二特征点筛选图的原点;
44、获取第二特征点筛选图中当前行驶车道对应的车道线;
45、当第二特征点筛选图中当前行驶车道对应的车道线相互不平行时,确定第二特征点筛选图中当前行驶车道对应的车道线之间的第二交点;
46、获取第二交点至第二特征点筛选图的原点之间的第二距离;
47、当第二距离的符号与第一距离的符号相反时,对第一距离和第二距离进行距离绝对值大小比较,获得距离最大值;第一距离的符号以及第二距离的符号分别与第一坐标轴的方向对应;
48、将距离最大值对应的视觉传感器俯仰角作为下一时刻标定的视觉传感器俯仰角。
49、在一些实施例中,外参更新单元包括还包括高度确定单元,高度确定单元用于:
50、根据当前时刻标定的视觉传感器偏航角对视觉传感器的偏航角进行修正,获得修正后的视觉传感器的偏航角;
51、基于修正后的视觉传感器的偏航角,通过视觉传感器采集新的第二图像;
52、确定第二图像对应的第三特征点筛选图;
53、获取第三特征点筛选图中当前行驶车道对应的车道线;
54、将第三特征点筛选图中当前行驶车道对应的车道线分别记为第一车道线和第二车道线;
55、在第三特征点筛选图中确定第一车道线与第一坐标轴之间的第一截距、以及第二车道线与第一坐标轴之间的第二截距;
56、根据第一截距以及第二截距确定视觉传感器高度。
57、在一些实施例中,高度确定单元包括高度确定子单元:
58、计算第一截距与第二截距之间的差值,将差值作为车道线宽度测量值;
59、获取车道线宽度预设值,将车道线宽度测量值与车道线宽度预设值之间的比值作为视觉传感器高度权重;
60、获取视觉传感器高度预设值;
61、将视觉传感器高度权重与视觉传感器高度预设值进行相乘处理,获得视觉传感器高度。
62、本技术实施例还提供一种电子设备,包括存储器存储有多条指令;所述处理器从所述存储器中加载指令,以执行本技术实施例所提供的任一种标定方法中的步骤。
63、本技术实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有多条指令,所述指令适于处理器进行加载,以执行本技术实施例所提供的任一种标定方法中的步骤。
64、本技术实施例可以基于当前时刻视觉传感器的外参,通过视觉传感器采集当前帧图像;建立当前帧图像对应的坐标系集合,并确定坐标系集合中坐标系之间的转换关系;根据转换关系更新当前时刻视觉传感器的外参;获取外参数据集,外参数据集包括当前时刻以及历史时刻下视觉传感器的外参,历史时刻包括当前时刻之前的时刻;根据外参数据集确定标定数值,标定数值为频次出现最多的差异数值;差异数值为视觉传感器的外参对应的不同数值;将标定数值赋值给视觉传感器的外参,以完成视觉传感器的外参标定。
65、在本技术中,可以建立坐标系集合,并且根据坐标系集合中坐标系之间的转换关系对当前帧图像对应的视觉传感器外参进行标定,同时还能够计算出视觉传感器高度,本技术对每一帧图像均标定了视觉传感器外参,然后将所有帧图像标定的视觉传感器外参组成视觉传感器外参数据集,并统计每种视觉传感器外参对应的不同数值的频次占比,从而确定最终标定完成的视觉传感器外参。由此,提升了视觉传感器外参标定的精度以及鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!