一种基于融合通信的全流程自动化装置的制作方法
1.本实用新型属于多媒体设备技术领域,特别是涉及一种基于融合通信的全流程自动化装置。
背景技术:
2.融合通信是指通信技术和信息技术的融合,运用融合通信技术的设备基本全流程自动化,实现操作便捷、高效的效果,但它在实际使用中仍存在以下弊端:
3.1、现有的基于融合通信的全流程自动化装置缺乏自身防护结构,导致装置在不使用时会因长期暴露在外而老化损坏;
4.2、现有的基于融合通信的全流程自动化装置作业时容易受到外界环境影响,具有一定的局限性。
5.因此,现有的基于融合通信的全流程自动化装置,无法满足实际使用中的需求,所以市面上迫切需要能改进的技术,以解决上述问题。
技术实现要素:
6.本实用新型的目的在于提供一种基于融合通信的全流程自动化装置,通过设置防护组件对通信组件的防护以及通信组件对自身结构的防护,解决了现有基于融合通信的全流程自动化装置缺乏自身防护结构以及在遇到特殊环境时无法作业的问题
7.为解决上述技术问题,本实用新型是通过以下技术方案实现的:
8.本实用新型为一种基于融合通信的全流程自动化装置,包括底座,所述底座包括的上层板上侧中间位置固定连接有通信组件,且上层板上侧尾部中间位置固定连接有防护组件;
9.所述通信组件包括的外壳内部尾端活动连接有翻转板,且翻转板内侧中部固定连接有显示屏,所述翻转板内侧上部固定连接有支座,且支座内侧端部设置有摄像头,且支座中部设置有抵触块;
10.所述防护组件包括的套筒底端固定连接在上层板上侧尾部中间位置,且套筒内部固定连接有防护伞的底端,所述防护伞伞面高度大于翻转板竖直状态时的高度。
11.进一步地,所述上层板下侧通过连杆固定连接有下层板,且下层板上侧呈对称固定连接有驱动马达,所述驱动马达输出端连接有车轮,驱动马达位于上层板与下层板之间,驱动马达作业时,且输出端带动车轮进行转动,而车轮与接触面之间存在摩擦,导致装置整体在车轮的驱动下进行移动。
12.进一步地,所述上层板前端中间位置固定连接有信号端,且信号端与外界控制端之间无线连接,信号端用于接收与发射信息,外界控制端将指令信息通过信号端传递至装置,反之,装置自身所采集的信息用过信号端传递至外界控制端。
13.进一步地,所述外壳固定连接在上层板中间位置,且外壳底部呈镂空设置,外壳呈开口箱状设置,当外界异物掉落至外壳内部时,最终从外壳底部的镂空区域掉落,避免杂物
在外壳内部堆积。
14.进一步地,所述外壳尾部侧边设置有传动配件,且传动配件与翻转板之间固定连接,所述传动配件外侧端部固定连接有电机,通过外界控制端控制电机作业,电机输出端带动传动配件内部输送带等结构转动,最终实现对翻转板的驱动。
15.进一步地,所述翻转板上侧尾端中间位置固定连接有限位块,且限位块与上层板之间的角度变化范围在零到九十度之间,限位块与翻转板保持同步转动,当翻转板处于竖直状态时,限位块一端与上层板之间抵触,从而限制翻转板无法继续旋转。
16.本实用新型具有以下有益效果:
17.1、本实用新型通过设置通信组件,在确保通讯与信息的融合运用的同时,通过翻转板的转动,实现对显示屏与摄像头的防护,确保显示屏与摄像头在不使用时不会因长期暴露而老化损坏。
18.2、本实用新型通过设置防护组件对通信组件的防护,实现确保在特殊环境下显示屏与摄像头的正常工作,维持自动化装置工作的稳定性。
附图说明
19.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
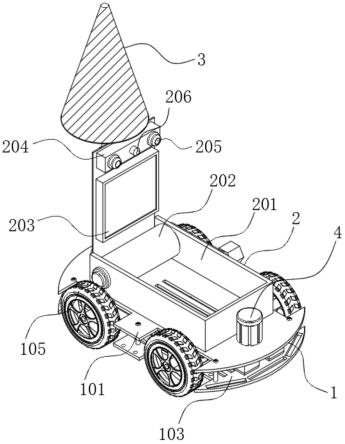
20.图1为本实用新型主体结构前部示意图;
21.图2为本实用新型主体结构后部示意图;
22.图3为本实用新型侧视示意图。
23.附图中,各标号所代表的部件列表如下:
24.1、底座;101、上层板;102、连杆;103、下层板;104、驱动马达;105、车轮;2、通信组件;201、外壳;202、翻转板;203、显示屏;204、支座;205、摄像头;206、抵触块;207、传动配件;208、电机;3、防护组件;301、套筒;302、防护伞;4、信号端;5、限位块。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
26.请参阅图1-3所示,本实用新型为一种基于融合通信的全流程自动化装置,包括底座1,底座1包括的上层板101上侧中间位置固定连接有通信组件2,且上层板101上侧尾部中间位置固定连接有防护组件3,本实用中所涉及的装置将通信技术与信息技术融合,通过通信组件2实现与外界的通信以及信息传输,而防护组件3则是用于对通信组件2的防护;
27.通信组件2包括的外壳201内部尾端活动连接有翻转板202,且翻转板202内侧中部固定连接有显示屏203,翻转板202内侧上部固定连接有支座204,且支座204内侧端部设置有摄像头205,且支座204中部设置有抵触块206;
28.翻转板202在外力驱动作用下实现翻转,而翻转板202的翻转则直接带动显示屏203以及摄像头205的旋转,在显示屏203以及摄像头205的不使用时,控制翻转板202与外壳
201开口重合,实现对显示屏203以及摄像头205的保护,反之,在显示屏203以及摄像头205使用时,根据显示屏203以及摄像头205的工作范围,进行调节改变翻转板202与外壳201之间的角度,显示屏203与摄像头205用于传递信息的同时也负责外界对现场的通讯;
29.防护组件3包括的套筒301底端固定连接在上层板101上侧尾部中间位置,且套筒301内部固定连接有防护伞302的底端,防护伞302伞面高度大于翻转板202竖直状态时的高度;
30.在强光以及恶劣天气下,控制防护伞302撑开伞面,此处的防护伞302时电动控制,属于现有常见技术,故不作较多介绍,防护伞302撑开之后,其伞面将翻转板202上方遮挡,对显示屏203以及摄像头205进行防护,避免显示屏203以及摄像头205因外界因素而影响其自身作业效果。
31.其中如图1所示,上层板101前端中间位置固定连接有信号端4,且信号端4与外界控制端之间无线连接,信号端4用于接收与发射信息,外界控制端将指令信息通过信号端4传递至装置,反之,装置自身所采集的信息用过信号端4传递至外界控制端。
32.其中如图2所示,外壳201固定连接在上层板101中间位置,且外壳201底部呈镂空设置,外壳201呈开口箱状设置,当外界异物掉落至外壳201内部时,最终从外壳201底部的镂空区域掉落,避免杂物在外壳201内部堆积;
33.外壳201尾部侧边设置有传动配件207,且传动配件207与翻转板202之间固定连接,传动配件207外侧端部固定连接有电机208,通过外界控制端控制电机208作业,电机208输出端带动传动配件207内部输送带等结构转动,最终实现对翻转板202的驱动;
34.翻转板202上侧尾端中间位置固定连接有限位块5,且限位块5与上层板101之间的角度变化范围在零到九十度之间,限位块5与翻转板202保持同步转动,当翻转板202处于竖直状态时,限位块5一端与上层板101之间抵触,从而限制翻转板202无法继续旋转。
35.其中如图3所示,上层板101下侧通过连杆102固定连接有下层板103,且下层板103上侧呈对称固定连接有驱动马达104,驱动马达104输出端连接有车轮105,驱动马达104位于上层板101与下层板103之间,驱动马达104作业时,且输出端带动车轮105进行转动,而车轮105与接触面之间存在摩擦,导致装置整体在车轮105的驱动下进行移动。
36.以上仅为本实用新型的优选实施例,并不限制本实用新型,任何对前述各实施例所记载的技术方案进行修改,对其中部分技术特征进行等同替换,所作的任何修改、等同替换、改进,均属于在本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1