一种无人机着降视觉位姿测量装置和方法与流程
本发明属于无人机,具体涉及一种无人机着降视觉位姿测量装置和方法。
背景技术:
1、传统的无人机自主定位包括惯性测量定位、雷达定位、高精度卫星定位等。惯性测量定位的效果主要取决于惯性测量单元的性能,高性能的惯性测量单元成本高且体积重量大,而微小型的惯性测量单元内置陀螺仪存在时漂现象,;雷达定位精度不高且设备复杂;高精度卫星定位借助卫星信号,容易受到干扰,在着降阶段难以保证其可靠性。而视觉位姿测量定位,主要应用单目或多目相机拍摄无人机着降区域场景图片,视觉处理器处理场景图片信息,基于透视投影模型,建立最优化模型,通过最优化目标函数解算无人机与无人机着降区域的相对位姿,实现无人机自主定位。而多目位姿测量系统中,多目相机安装精度要求很高,测量系统复杂,前期标定繁琐,单目视觉位姿测量系统,结构简单,安装难度较低,前期无需大量标定。
2、目前单目视觉无人机着降位姿测量靶标通常为特定图案的平面黑白标识或红外led。当光线不足时,视觉处理器将无法识别平面黑白标识图案,无人机夜间着降受限。目前使用红外led为单目视觉无人机着降位姿测量靶标进行位姿测量时,通常布置4红外led,且根据各靶标布置的相对位置确定靶标的3d-2d坐标匹配关系,受相机视场限制,当无人机偏离着降区域较远时,无法同时拍摄到所有靶标,位姿测量系统失效。增加红外led数量后,单纯根据靶标布置的相对位置关系,可能会出现靶标3d-2d坐标匹配错误的情况,影响位姿测量精度。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种无人机着降视觉位姿测量装置和方法。本发明方案能够解决上述现有技术中存在的问题。
2、本发明的技术解决方案:
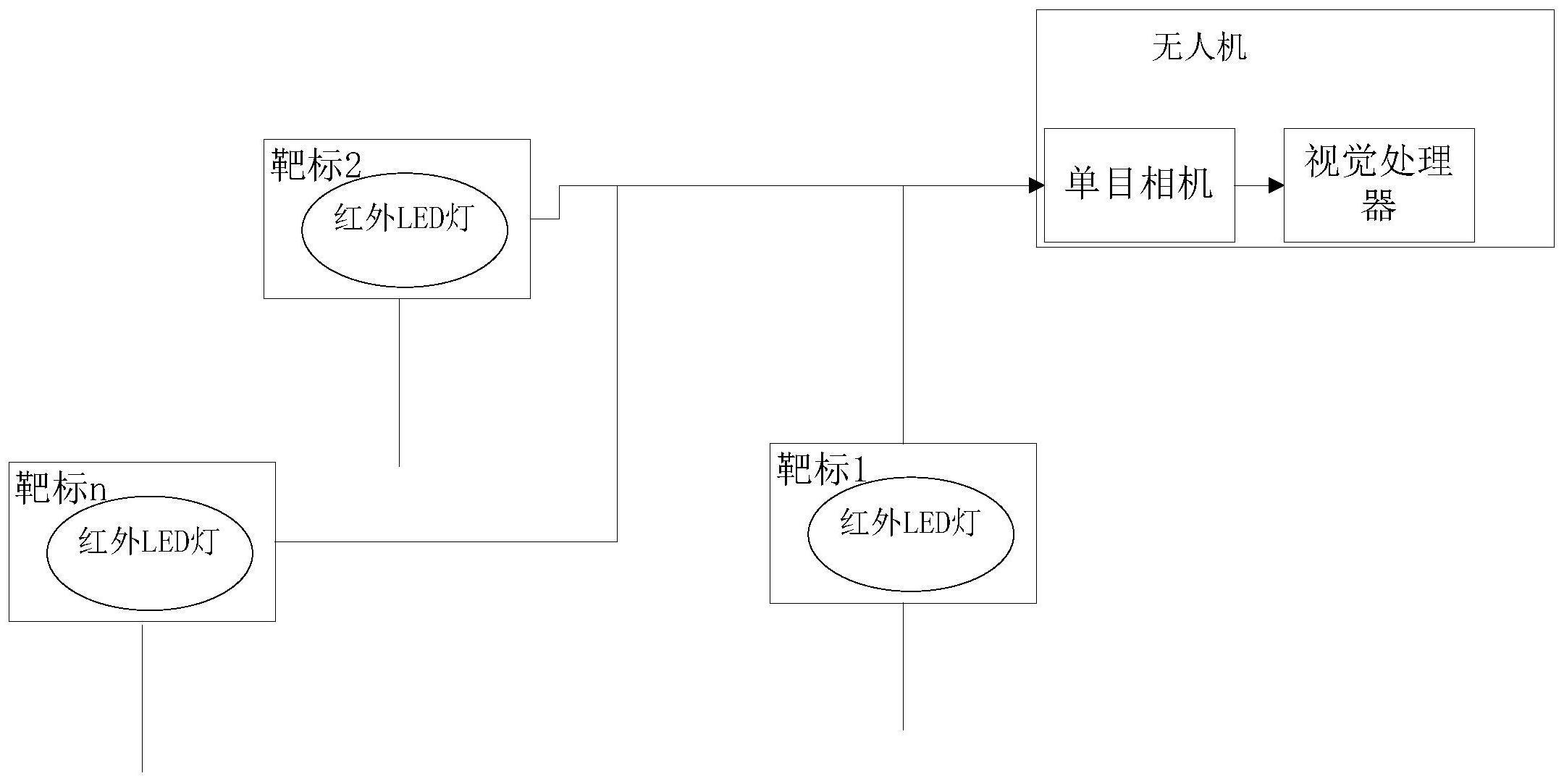
3、根据第一方面,提供一种无人机着降视觉位姿测量装置,包括无人机、单目相机、视觉处理器和n个靶标,所述的n个靶标固定在无人机着降跑道上,每个所述靶标上安装若干个红外led灯,所述的单目相机安装在所述无人机下方,获取着降区域的原始目标场景图像,所述的单目相机和视觉处理器相连,将获得的原始目标场景图像传送给所述的视觉处理器,所述的视觉处理器对原始目标场景图像进行处理,提出目标场景图像中的靶标特征,并根据靶标特征计算无人机相对于着降区域的相对位姿。
4、进一步的,所述的n大于10。
5、进一步的,所述靶标的高度不相同。
6、进一步的,所述的红外led灯外安装有匀光板。
7、进一步的,所述的单目相机镜头上安装红外滤光片。
8、根据第二方面,提供一种无人机着降视觉位姿测量方法,包括以下步骤:
9、无人机飞行至着降区域上空有效区域后,单目相机采集得原始目标场景图片;
10、对原始目标场景图片进行处理,提出目标场景图片中靶标的边缘轮廓;
11、对获得的边缘轮廓进行处理,获得备选靶标相同或相似的图形;
12、对获得的备选相同或相似的图形进行筛选,选择大小满足设定范围的备选备选相同或相似的图形作为目标图形;
13、根据获得的目标图形的数目n',判断原始目标图片的处理是否合理,若合理则进行下一步,若不合理则返回对原始目标场景图片重新处理;
14、根据靶标中心在无人机着降区域的坐标{(xi,yi,zi)|i=1,2,3...n}、目标图形中心在图像坐标系下的坐标{(xi,yi)|i=1,2,3...n'}和单目相机的焦距f,建立全局目标函数e:
15、
16、其中,mjk为对应关系权重系数,m=s(r1,tx),n=s(r2,ty),s=f/tz,无人机着降区域坐标系到图像坐标系之间的平移矩阵为t=[tx ty tz]t,无人机着降区域坐标系到图像坐标系之间的旋转矩阵为r=[r1 r2 r3]t,wk(k=1,2,3…n)=1,sk=(xk,yk,zk)t;
17、根据全局目标函数求解对应关系权重系数mjk、无人机着降区域坐标系到图像坐标系之间的旋转矩阵r、无人机着降区域坐标系到图像坐标系之间的平移矩阵t;
18、根据相机坐标系到无人机坐标系之间的旋转矩阵r’与平移矩阵t’、对应关系权重系数mjk、无人机着降区域坐标系到图像坐标系之间的旋转矩阵r、无人机着降区域坐标系到图像坐标系之间的平移矩阵t,求解无人机的着降位姿。
19、进一步的,所述的对原始目标场景图片进行处理,提出目标场景图片中靶标的边缘轮廓的方法,包括以下步骤:
20、对原始场景图片的线性畸变进行校正,得到目标场景图片1;
21、求得目标场景图片1的阈值h,并利用阈值h对目标场景图片1进行二值化处理,得到目标场景图片2;
22、提出目标场景图片2中靶标的边缘轮廓。
23、进一步的,对获得的边缘轮廓进行处理,获得靶标相同或相似图形的方法为:
24、根据获得的靶标的边缘轮廓进行拟合,获得与靶标形状相同或相似的图形,将具有相似尺寸与中心位置的图形作为备选图形。
25、进一步的,尺寸满足设定范围为:rsmin<rs<rsmax,其中,rsmin=(led灯组成图形尺寸/跑道宽度)×图片宽度×0.5,rsmax=(led灯组成图形尺寸/跑道宽度)×图片宽度×1.5。
26、进一步的,所述的判断原始目标图片的处理是否合理的标准为:4≤n'≤n,则原始目标图片处理合格,反之,不合格。
27、本发明与现有技术相比的有益效果:
28、(1)本发明只需简单安装单目相机,在前期无需大量标定,节省时间;
29、(2)本发明通过建立多个靶标3d-2d坐标的匹配系数,并在迭代求解最优化模型过程时不断更新,避免因靶标3d-2d坐标错误匹配而导致位姿测量失效,提高无人机位姿确定的精度,保证无人机着降的安全。
技术特征:
1.一种无人机着降视觉位姿测量装置,其特征在于,包括无人机、单目相机、视觉处理器和n个靶标,所述的n个靶标固定在无人机着降跑道上,每个所述靶标上安装若干个红外led灯,所述的单目相机安装在所述无人机下方,获取着降区域的原始目标场景图像,所述的单目相机和视觉处理器相连,将获得的原始目标场景图像传送给所述的视觉处理器,所述的视觉处理器对原始目标场景图像进行处理,提出目标场景图像中的靶标特征,并根据靶标特征计算无人机相对于着降区域的相对位姿。
2.根据权利要求1所述的一种无人机着降视觉位姿测量装置,其特征在于,所述的n大于10。
3.根据权利要求2所述的一种无人机着降视觉位姿测量装置,其特征在于,所述靶标的高度不相同。
4.根据权利要求2或3所述的一种无人机着降视觉位姿测量装置,其特征在于,所述的红外led灯外安装有匀光板。
5.根据权利要求2或3所述的一种无人机着降视觉位姿测量装置,其特征在于,所述的单目相机镜头上安装红外滤光片。
6.使用如权利要求1-5任一所述的一种无人机着降视觉位姿测量方法,其特征在于,所述方法包括以下步骤:
7.根据权利要求6所述的一种无人机着降视觉位姿测量方法,其特征在于,
8.根据权利要求6所述的一种无人机着降视觉位姿测量方法,其特征在于,对获得的边缘轮廓进行处理,获得靶标相同或相似图形的方法为:
9.根据权利要求8所述的一种无人机着降视觉位姿测量方法,其特征在于,尺寸满足设定范围为:rsmin<rs<rsmax,其中,rsmin=(led灯组成图形尺寸/跑道宽度)×图片宽度×0.5,rsmax=(led灯组成图形尺寸/跑道宽度)×图片宽度×1.5。
10.根据权利要求6所述的一种无人机着降视觉位姿测量方法,其特征在于,所述的判断原始目标图片的处理是否合理的标准为:4≤n'≤n,则原始目标图片处理合格,反之,不合格。
技术总结
本发明提供一种无人机着降视觉位姿测量装置和方法,包括无人机、单目相机、视觉处理器和n个靶标,n个靶标固定在无人机着降跑道上,每个靶标上安装若干个红外LED灯,单目相机安装在无人机下方,获取着降区域的原始目标场景图像,单目相机和视觉处理器相连,将获得的原始目标场景图像传送给视觉处理器,视觉处理器对原始目标场景图像进行处理,提出目标场景图像中的靶标特征,并根据靶标特征计算无人机相对于着降区域的相对位姿。本发明提高无人机位姿确定的精度,保证无人机着降的安全。
技术研发人员:祖亚慧,刘柳,张妍,刘忠诚
受保护的技术使用者:海鹰航空通用装备有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!