基于短期观测的驾驶行为模式实时分类方法及系统
1.本发明属于智能交通数据分析技术领域,具体涉及一种基于短期观测的驾驶行为模式实时分类方法及其系统,是一种应用于智能车辆的利用短期观测数据对驾驶员驾驶行为模式进行分类的技术,通过在较短时间窗口内的观察数据,利用算法获得驾驶模式的分类结果,和不同驾驶行为模式的直观解释,可进一步用于车辆行为预测。
背景技术:
2.近年以来,人类在交通系统方面取得了长足进步,特别是随着先进传感器被安装于道路基础设施和车辆上,可以收集多种感知数据来实现情景感知和机器智能,从而实现智能交通系统(intelligent transportation)。在相关问题中,为了指导车辆和交通调度中心进行正确的决策,车辆轨迹和驾驶员行为的预测是一个至关重要的话题。对于这一话题,有三种主流的研究方向:基于模型的预测,基于意图的预测和交互感知预测。然而,上述的方法都没有考虑驾驶员不同的驾驶行为模式(包括驾驶行为倾向和状态)对预测结果的影响,而是同等地分析所有车辆的行为。但在实际驾驶中,驾驶行为有不同倾向(冲动、保守)或处在不同状态(正常、匆忙、醉酒)的驾驶员,可以有十分不同的驾驶行为。为了更好地进行预测,需要对不同的驾驶员进行个性化的处理。
3.因此,在业界也存在着大量的驾驶行为模式分析和识别的工作。其中最主流的方法应用了数据挖掘的方法进行驾驶行为模式的分类,其中较为典型的为数据聚类。一些早期的工作也使用基于模糊逻辑的方法进行驾驶行为模式识别。伴随着机器学习的迅速发展,许多研究人员倾向于使用基于机器学习的技术例如支持向量机(support vector machine,svm)来达到分类的目标。除此之外,为了提升分类精度或实现不同来源,不同格式的数据的融合,从时域到频域的域转换操作也十分常见。
4.在基于数据挖掘的工作中,通常使用主成分分析(principal component analysis,pca)和分层聚类算法(hierarchical clustering algorithm,hca)来处理原始驾驶数据,然而部分早期工作仅适用于非常有限的预选驾驶参数或特征,具体来说,仅限于车辆的速度、加速度和机械运转情况,尚未考虑位置相关参数。在一项近期工作中,更多的驾驶特征被引入,并且引入基于中心点的划分(partitioning around medoids,pam)和k均值聚类算法来将驾驶员分为几类。但此类工作往往需要较长的观测时间来获得充足的车辆与驾驶员数据,并不适用于对实时性要求较高的在线分析系统。而在另一项近期工作中,研究者通过半监督的svm在不降低性能的基础上减少数据标记的负担,但只关注了前进方向的行为,仅考虑了车速和油门状况。
5.总而言之,上述现有工作或是基于某些人为预先定义的驾驶行为模式进行分类,并且对于不同的交通条件而言,判断不同风格的规则十分不同,例如交通拥挤与否,黑夜和白天等,普适性较差;或是需要大量数据来达到预期的精度,然而在实际应用中难以收集到全部需要的数据。现有技术难以实现在任意实际环境中,仅通过较短时间内的观测数据,对驾驶行为模式进行实时连续的分类。
技术实现要素:
6.本发明提出了一种基于短期观测的驾驶行为模式实时分类方法及系统,是一个可以在智慧交通系统中实现实时应用的算法,分类方法有效性高,分类结果可解释性好,适用性强。
7.本发明利用来源于车载传感器和路侧单元(road side units,rsu)的驾驶行为数据,包括车辆的位置、速度、加速度等。在技术上,通过数据过滤,域变换和降维的方法提取来自不同来源的驾驶数据的特征,之后利用当前道路环境中的历史观测数据集作为训练集进行无监督学习,将驾驶行为模式分为几个不同的类别,建立起对后续任意新观测车辆的驾驶行为模式进行分类的分类策略。经过开源数据集的验证表明,本方法可以成功地将驾驶员按驾驶行为模式分为几类,同时分类具有较好的可解释性。除此之外,可以通过对较短时间的观测数据进行分类,因此可以在实时性要求较高的交通场景中实时应用。本发明的分类结果可以输入给现有的车辆行为预测算法,为预测提供新的参考数据,以改善车辆行为预测分析的结果。
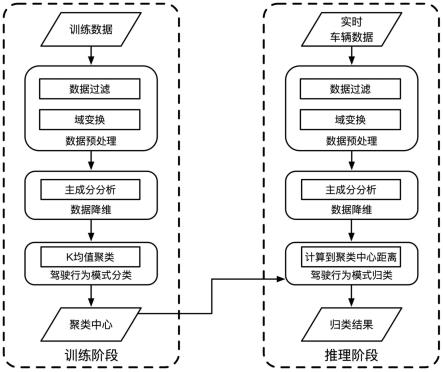
8.具体实施时,本发明提出的基于短期观测的驾驶行为模式实时分类方法包括训练阶段和推理阶段;其中,训练阶段以历史短期观测数据作为输入,先后经过数据预处理,数据降维和驾驶行为分类步骤,得到历史观测数据的几个聚类中心,作为驾驶行为模式的类别;之后,推理阶段以实时的车辆数据作为输入,经历同样的数据预处理和数据降维过程后,根据推理阶段得到的聚类中心,对实时车辆数据进行归类,得到驾驶行为模式的归类结果,作为算法最终的输出。
9.基于短期观测的驾驶行为模式实时分类方法包括如下步骤:
10.1)将当前交通环境下的历史短期观测数据作为训练数据,输入到训练阶段的数据预处理模块,对历史观测数据进行预处理;
11.数据预处理模块首先通过数据过滤模块选择与车辆状态或相邻车辆相对状态相关的参数整合为状态观测向量,之后选取宽度为n的时间窗口,将窗口内的所有时刻观测数据整合为状态观测矩阵,其中矩阵的每一列为一个时刻的状态观测向量,矩阵共n列,对观测矩阵做傅立叶变换到频域,得到频域观测矩阵。
12.2)为了选取数据中对聚类作用显著的成分并且降低计算复杂度,对1)中的频域观测矩阵进行主成分分析降维,根据设定的阈值确定数据降维后的维度,得到降维频域观测矩阵数据,作为后续聚类算法的输入。
13.3)通过k均值聚类算法,将2)中输出的所有车辆对应的降维频域观测矩阵数据分成k个类别,并且通过calinski-harabasz指标(ch指标)对聚类的效果进行评估,选取ch指标最大的k值作为类别数,并且输出每一类别的聚类中心,作为训练阶段的输出结果,供推理阶段使用。
14.4)在推理阶段,对于新观测的车辆数据,进行1)中的数据预处理和2)中的数据降维,得到新观测车辆的降维频域观测矩阵,确保数据形式的统一,以备后续驾驶行为模式归类模块使用。
15.5)利用4)中处理得到的降维频域观测矩阵和3)中输出的训练结果,可以计算得到新观测车辆的降维频域观测矩阵到训练得到的聚类中心的距离,通过归一化的概率密度表示,可以评估车辆数据属于某一类别的概率,通过取最大值,对降维频域观测矩阵进行归
类,最终输出为归类结果,即为车辆驾驶员的驾驶行为模式。
16.6)当交通场景不变时,在经过步骤1)—3)进行一次训练后,可以循环执行步骤4)-5),对所有途经车辆数据进行实时的归类,得到车辆驾驶员驾驶行为模式实时归类结果),作为智能交通系统其他模块的参考数据,如果交通场景发生变化,则需重新执行1)-3)的训练阶段重新训练,得到新场景下的聚类结果,之后再循环4)-5)的步骤。
17.通过上述步骤,实现对驾驶员驾驶行为模式的实时分类。
18.基于上述实时分类方法,本发明具体实施时实现了一种基于短期观测的驾驶行为模式实时分类系统,包括:数据预处理模块(包括数据过滤模块和域转换模块)、数据降维模块、驾驶行为模式分类模块和驾驶行为模式归类模块。其中,驾驶行为模式分类模块用于在训练阶段,以历史观测数据作为训练数据输入,输出驾驶行为模式分类中心;驾驶行为模式归类模块用于在推理阶段,以实时观测数据作为输入,输出驾驶行为模式归类结果。
19.与现有技术相比,本发明的有益效果:
20.本发明提供的基于短期观测的驾驶行为模式实时分类算法,由于推理阶段仅需要短期观测数据,更好的适应交通场景下实时性的要求,可以在线部署于智能交通系统;采用数据驱动的思想,充分利用交通系统中数据,经过域变换和降维,在降低计算负担的同时,更好地凸显数据的特征,提高分类效果;且对于不同驾驶环境,根据数据自身的分布确定聚类结果,无需人为确定分类策略,并具有较好的可解释性。
21.本发明提供的驾驶行为模式分类方法具有以下优点:
22.(一)考虑到驾驶行为模式对特定驾驶行为发生的绝对时间不敏感,而受驾驶行为的相对关系影响较大,通过域转换的思想,将时间窗口上采集的数据转换至频域,更好地反映行为趋势。
23.(二)在进行数据处理前,对数据进行主成分分析和降维,强调数据的显著特征的同时,减少平均分布在各个维度上的噪声,并且在保证信息量大于阈值的前提下降低计算负担,提升效率。
24.(三)应用数据驱动的思想,在训练阶段采用无监督学习,在聚类时根据历史数据本身的特点决定驾驶行为模式分类的类别总数和分类标准,且当环境改变时,只需重新采集数据进行训练,无需人为评估环境,对分类规则进行调整。
25.(四)当环境固定时,算法经一次训练后可对后续车辆的观测数据进行实时地分析,仅需要以短时间的观测作为输入,并且推理阶段计算复杂度较低,适合对效率要求较高的智能交通系统。
附图说明
26.图1是本发明具体实施提供的驾驶行为模式实时分类算法的流程框图。
27.图2是本发明具体实施时数据降维模块的工作流程框图。
28.图3是本发明具体实施时驾驶行为模式分类模块的工作流程框图。
29.图4是本发明具体实施时驾驶行为模式归类模块的工作流程框图。
具体实施方式
30.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实
施方式对本发明作进一步详细的说明。
31.本发明方法的整体流程如图1所示,包括训练阶段和推理阶段先后两个部分,具体实施实现了驾驶行为模式实时分类,训练阶段和推理阶段二者共有的算法模块包括数据预处理模块,数据降维模块,其中数据预处理模块包括数据过滤模块和域转换模块,数据预处理模块用于收集并筛选适用的数据,生成状态观测矩阵,域转换模块用于将时域的状态观测矩阵转换为频域;训练阶段特有的模块为驾驶行为模式分类模块,训练阶段以历史观测数据作为训练数据输入,输出驾驶行为模式分类中心;推理阶段特有的模块为驾驶行为模式归类模块,推理阶段以实时观测数据作为输入,输出驾驶行为模式归类结果。
32.本发明中的训练阶段利用特定交通环境下的历史观测数据进行计算,得到的结果作为推理阶段的数据,推理阶段由实时数据作为输入,对车辆的驾驶行为模式进行实时分类,具体工作步骤如下:
33.s10:将当前交通环境下的历史观测数据作为训练数据,输入训练阶段的数据预处理模块,对数据进行预处理,首先通过数据过滤模块选择与车辆状态或相邻车辆相对状态相关的参数整合为状态观测向量,其中,状态观测向量的每个元素为一个状态相关参数,参数的选择可以根据系统中传感器类型决定,但同一系统内应保持统一。之后选取宽度为n的时间窗口,具体实施时n可取200,一般对应20秒左右的观测数据,将窗口内的所有时刻观测数据按列排列,整合为状态观测矩阵,状态观测矩阵的每一列为一个时刻的状态观测向量,共n列,再对状态观测矩阵做傅立叶变换到频域。
34.s20:为了选取数据中对聚类作用显著的成分并且降低计算复杂度,对s10中的频域观测矩阵进行如图2所示的主成分分析降维,根据人工设定的阈值确定数据降维后的维度,得到降维的频域观测矩阵降维,作为后续聚类算法的输入。
35.s30:通过如图3所示的k均值聚类算法,将s20中输出的所有车辆对应的降维频域观测矩阵分成k个类别,并且通过calinski-harabasz指标(ch指标)对聚类的效果进行评估,选取ch指标最大的k值作为类别数,并且输出每一类别的聚类中心,作为训练阶段的输出结果,供推理阶段使用。
36.s40:在推理阶段,对于新观测的车辆状态观测矩阵,进行s10中的数据预处理和s20中的数据降维,确保数据形式的统一,以备后续驾驶行为模式归类模块使用。
37.s50:利用s40中处理生成的降维频域观测矩阵和s30中输出的训练结果,可以计算降维频域观测矩阵到训练得到的聚类中心的距离,通过归一化的概率密度表示,可以评估车辆数据属于某一类别的概率,通过取最大值,可以对车辆驾驶员的驾驶行为模式进行归类,归类流程如图4所示,最终输出为归类结果。
38.s60:当交通场景不变时,在一次训练后,算法可以循环执行s40-s50的步骤,对所有途径车辆的驾驶员驾驶行为模式进行实时的归类,作为智能交通系统其他模块的参考数据,如果交通场景发生变化,则需重新执行s10-s30的训练阶段,得到新场景下的聚类结果,之后再循环s40-s50的步骤。
39.在步骤s10:需要通过对输入训练数据的预处理,得到可以直接供后续模块使用的数据形式,该步骤包含以下流程s11~s14:
40.s11:输入训练数据为当前环境下多种传感器采集的,可包括多种与车辆状态相关的冗余数据,首先将与某车辆相关的数据整合为统一的状态向量x
t
=[x1,x2,
…
,xn]
t
,其中
每一个元素代表与车辆相关的一种数据,n为数据种类的总数,t代表数据对应的时刻;t表示转置。
[0041]
s12:根据数据与车辆行为的相关性,从全部的n种数据中,筛选与车辆自身动态或相邻车辆有关系的k种数据,生成实际应用于后续算法的状态子向量在实际应用中,可以根据情况选择车辆位置、速度、加速度、与前车相对位置、相对速度等数据;
[0042]
s13:在一段包含n个时间点的时间区间t内,存储该车辆的状态子向量,形成k*n的状态矩阵:
[0043][0044]
s14:对状态矩阵的每一行进行傅立叶变换,将数据从时间域转换为频域,相比于时间数据更加符合聚类的需求,完成对数据的预处理:
[0045][0046]
在步骤s20:对预处理过的状态矩阵频域数据进行降维,选取最有利于聚类的数据以降低计算负担,该步骤包含以下流程s21~s22:
[0047]
s21:通过应用主流的线性降维方法主成分分析(principal component analysis,pca)法,对步骤s10中的频域数据矩阵xk×n进行降维,根据pca流程,首先对矩阵求协方差矩阵并且对协方差矩阵进行特征值分解,得到特征值和特征向量;
[0048]
s22:确定降维后的维度为r,首先将特征向量按特征值从大到小排列,每个特征向量表示线性变换后的一个维度,特征值大小反应该维度上方差的大小,由某个特征向量i的特征值和所有特征值之和的比值,可以得到方差系数vi,r可以表示为:
[0049][0050]
其中v
th
为人为设定的阈值参数,r为使方差系数之和大于v
th
的最小维数,v
th
越大降维后保留的信息越完整但维数越高,反之亦然。
[0051]
s23:根据r将步骤s14的频域观测矩阵投影到特征值最大的r个特征向量组成的空间上,即为频域观测矩阵降维数据。
[0052]
在步骤s30:通过对预处理和降维后的数据进行聚类,得到多个聚类结果,作为驾驶行为模式类别,完成训练阶段,该步骤包含以下流程s31~s34:
[0053]
s31:通过应用主流的聚类算法(k均值聚类算法),可以对历史观测数据中所有车辆数据经过s20步骤降维后的训练数据进行聚类,通过设定不同的k,可以将数据分为k个类别,即为驾驶行为模式的类别,并且计算出每个类别的聚类中心,首先通过改变不同的k,得到若干个结果以备后续筛选。
[0054]
s32:为了确定最优的类别k,通过calinski-harabasz指标(ch指标)作为评估标
准,首先计算类方差总和sw(k):
[0055][0056]
其中,k为聚类个数,为第i类所有数据的集合,x为数据,mi为k均值算法输出的聚类中心,||.||2代表取欧氏距离;
[0057]
s33:之后计算类间方差总和sb(k):
[0058][0059]
其中,m代表所有数据的中心,ni为第i类内数据的个数,其余定义同s32;
[0060]
s34:根据ch指标的计算公式:
[0061][0062]
其中n为数据总数,根据s31中计算的不同k的结果,比较不同k时ch的取值,选取使ch指标取最大值的k,将其记为m,作为最终的聚类数量,并且输出m个聚类中心。
[0063]
在步骤s40:在推理阶段,输入实时观测的车辆数据,对新观测到的车辆数据进行预处理和降维,为归类作准备,该步骤包含以下流程s41~s42:
[0064]
s41:收集车辆在同样包括n个时间点的一段时间中的数据,进行步骤s10中的数据预处理,得到频域数据矩阵xk×n;
[0065]
s42:对频域数据矩阵进行步骤s20中的数据降维,其中降低后的维度取训练阶段中的r,确保数据的格式统一,可供后续操作。
[0066]
在步骤s50:利用s40中处理的车辆数据,对该车辆驾驶员的驾驶模式进行归类,其中归类的类别依据是训练过程中输出的聚类中心,该步骤包含以下流程s51~s53:
[0067]
s51:根据s40中处理的降维后的车辆频域数据,和s30中输出的m个聚类中心mi,可以计算出车辆数据到每个聚类中心的欧式距离di;
[0068]
s52:根据中心极限定理,可以认为车辆的数据服从高斯分布,因此车辆数据属于第i类别的概率密度函数可以表示为:
[0069][0070]
其中a和b为归一化常数,不影响最终结果。
[0071]
s53:由于数据的归类结果受属于某一类别的概率和属于其他类别的概率的比值影响,
[0072]
因此需要经过概率归一化,得到最终的属于第i类别的概率:
[0073][0074]
其中分母代表属于所有类别的概率密度之和,分子代表属于第i类别的概率密度,计算所有m个类别的pi(di),其中取到最大值的i即为最终的聚类结果,作为算法的最终输出。
[0075]
在步骤s60:车辆通过对当前交通场景下的经过车辆的数据进行采集,循环进行推理阶段,持续输出归类结果,如果交通场景发生改变,则重新进行训练阶段后再进行推理阶段,该步骤包含s61~s62:
[0076]
s61:对于当前交通场景,会实时的经过若干车辆,当有新的车辆途径时,算法将利用对新车辆的短期观测结果,重复推理阶段的s40-s50步骤,实时地输出车辆的驾驶员驾驶模式归类结果,可以为智能交通系统其他模块提供数据参考;
[0077]
s62:如果交通场景发生变化,例如部署在新的路段,或道路发生施工时,需要重复一次s10-s30的训练阶段,生成新场景下的分类结果,之后当车辆途径新场景时,可以继续执行流程s61,实时输出结果;
[0078]
需要注意的是,公布实施例的目的在于帮助进一步理解本发明,但是本领域的技术人员可以理解:在不脱离本发明及所附权利要求的范围内,各种替换和修改都是可能的。因此,本发明不应局限于实施例所公开的内容,本发明要求保护的范围以权利要求书界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1