一种全景摄像头标定方法与流程
1.本发明涉及摄像头标定技术领域,尤其涉及一种全景摄像头标定方法。
背景技术:
2.随着计算机视觉和图像技术的迅速发展,越来越多技术被应用到汽车电子领域,全景视觉辅助系统就是其中一项重要的应用。全景视觉系统要感知360
°
全方位的环境,因此多个视觉传感器相互协同配合作,形成全车周围一整套的视频图像。全景系统出厂前需要进行标定,以保证全景图像显示的准确度和精准性。目前全景标定图案大多采用黑白相间的图案(棋盘格图案),使用此种标定图案需要满足以下几个条件:
3.1)一般是需要四块标定布,前后左右各放置一块;
4.2)车辆放置位置和方向要相对精准;
5.3)棋盘格图案每个格子尺寸要精准;
6.鉴于上述条件,对实施人员操作熟练度和精准度要求较高,当操作出现误差时,拼接精度就会受到影响。
技术实现要素:
7.本发明要解决的技术问题是:为了解决现有技术中车辆摄像头的标定方法对实施人员操作熟练度和精准度要求较高,当操作出现误差时,拼接精度就会受到影响的问题,本发明提供了一种全景摄像头标定方法来解决上述问题。
8.本发明解决其技术问题所采用的技术方案是:一种全景摄像头标定方法,包括以下步骤:
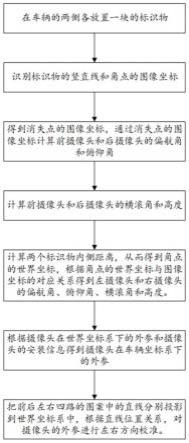
9.s1、在车辆的两侧各放置一块的标识物,所述标识物包括黑色的矩形外框和矩形外框内的空白区域,在所述空白区域上设置有四个角点,所述四个角点呈矩形分布并处于矩形的四个角上,两个所述标识物的长边平行并且短边共线;
10.s2、通过摄像头识别得到标识物的竖直线和角点的图像坐标,所述竖直线为标识物的长边所在直线;
11.s3、得到消失点的图像坐标,所述消失点为四条竖直线的交点,通过消失点的图像坐标计算前摄像头和后摄像头的偏航角和俯仰角;
12.s4、根据前摄像头和后摄像头的偏航角和俯仰角计算前摄像头和后摄像头的横滚角和高度;
13.s5、根据标识物的短边宽度、前摄像头和后摄像头的偏航角和俯仰角计算两个标识物内侧距离,从而得到角点的世界坐标,根据角点的世界坐标与图像坐标的对应关系得到左摄像头和右摄像头的偏航角、俯仰角、横滚角和高度。
14.具体的,在步骤s3中:
15.根据消失点的图像坐标p(u,v)和世界坐标(xw,yw,zw)转换关系得到以下等式:
[0016][0017]
其中λ是比例系数,m
intrinsical
是内参矩阵,m
extrinsical
是外参矩阵,p
world
是世界坐标系的点;h
3*4
=m
intrinsical
*m
extrinsical
;
[0018][0019][0020]
其中d
x
和dy是象元尺寸,(u0,v0)是图像中心坐标,f
x
=f/d
x
,fy=f/dy是x轴和y轴的归一化焦距,r是旋转矩阵,t是平移矩阵;
[0021][0022]
其中pitch是俯仰角,yaw是偏航角,roll是横滚角;c1是cos(pitch),c2是cos(roll),c3是cos(yaw),s1是sin(pitch),s2是sin(roll),s3是sin(yaw);对于地面上的点zw=0,假设横滚角roll=0简化得到以下等式:
[0023][0024]
在世界坐标系下,根据消失点的特性,xw=∞,yw=0得到以下等式:
[0025]
h(3,1)u-h(1,1)=0
[0026]
h(3,1)v-h(2,1)=0
[0027]
计算得出:
[0028]
pitch=atan((v
0-v)/fy),yaw=atan((u-u0)*atan(pitch)/f
x
)。
[0029]
作为优选,还包括以下步骤:
[0030]
s6,根据摄像头在世界坐标系下的外参和摄像头的安装信息得到摄像头在车辆坐标系下的外参。
[0031]
本发明的有益效果是,这种全景摄像头标定方法相对现有的标定方法更加简便和快捷,对实施人员操作熟练度和精准度要求不高,不易产生操作失误,从而提高了全景摄像的拼接精度。
附图说明
[0032]
下面结合附图和实施例对本发明进一步说明。
[0033]
图1是本发明的一种全景摄像头标定方法的最优实施例的流程图。
[0034]
图2是本发明的一种全景摄像头标定方法的标识物与车辆的放置示意图。
[0035]
图3是本发明的一种全景摄像头标定方法的竖直线的示意图。
具体实施方式
[0036]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
[0037]
流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更多个用于实现特定逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本发明的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本发明的实施例所属技术领域的技术人员所理解。
[0038]
如图1所示,本发明提供了一种全景摄像头标定方法,包括以下步骤:
[0039]
s1、如图2所示,在车辆的两侧各放置一块的标识物,标识物包括黑色的矩形外框和矩形外框内的空白区域,在空白区域上设置有四个“十”字形角点,四个角点呈矩形分布并处于矩形的四个角上,两个标识物的长边平行并且短边共线;标识物设置在车辆两侧,此实例中,对两个标识物的距离、车辆具体停放位置没有严格固定的要求,只需要原图满足摄像头拍摄和后续处理的要求即可。车辆如尽量放置在两个标识物的中间位置,既可以保证四方的原图中有完整的图案,图案清楚完整,也会减少计算过程的累计误差。
[0040]
s2、通过摄像头拍摄图案,然后通过opencv视觉算子识别标识物的线型轮廓,从线型轮廓中筛选出直线点集,进行直线拟合得到竖直线,竖直线为标识物的长边所在直线。通过opencv视觉算子还可以识别出角点的图像坐标。
[0041]
s3、如图3所示,根据四条竖直线得到消失点的图像坐标,消失点为四条竖直线的交点,通过消失点的图像坐标计算前摄像头和后摄像头的偏航角和俯仰角:
[0042]
根据消失点的图像坐标p(u,v)和世界坐标(xw,yw,zw)转换关系得到以下等式:
[0043][0044]
其中λ是比例系数,m
intrinsical
是内参矩阵,m
extrinsical
是外参矩阵,p
world
是世界坐标系的点;h
3*4
=m
intrinsical
*m
extrinsical
;
[0045][0046]
[0047]
其中d
x
和dy是象元尺寸,(u0,v0)是图像中心坐标,f
x
=f/d
x
,fy=f/dy是x轴和y轴的归一化焦距,r是旋转矩阵,t是平移矩阵;
[0048][0049][0050]
其中pitch是俯仰角,yaw是偏航角,roll是横滚角;c1是cos(pitch),c2是cos(roll),c3是cos(yaw),s1是sin(pitch),s2是sin(roll),s3是sin(yaw);俯仰角、偏航角和横滚角是摄像头的外参,也是旋转矩阵中的参数。平移矩阵中的参数包括水平位置和高度,水平位置是已知的,所以只需要求得摄像头的高度就能获得摄像头的平移矩阵,这也是它的外参。
[0051]
对于地面上的点zw=0,假设横滚角roll=0简化得到以下等式:
[0052][0053]
在世界坐标系下,根据消失点的特性,xw=∞,yw=0得到以下等式:
[0054]
h(3,1)u-h(1,1)=0
[0055]
h(3,1)v-h(2,1)=0
[0056]
计算得出:
[0057]
pitch=atan((v
0-v)/fy),yaw=atan((u-u0)*atan(pitch)/f
x
)。
[0058]
s4、根据前摄像头和后摄像头的偏航角和俯仰角计算前摄像头和后摄像头的横滚角和高度;
[0059]
s5、根据标识物的短边宽度、前摄像头和后摄像头的偏航角和俯仰角计算两个标识物内侧距离,从而得到角点的世界坐标,利用opencv就可以根据角点的世界坐标与图像坐标的对应关系得到左摄像头和右摄像头的偏航角、俯仰角、横滚角和高度。
[0060]
s6,根据摄像头在世界坐标系下的外参和摄像头的安装信息得到摄像头在车辆坐标系下的外参。
[0061]
s7、把前后左右四路的图案中的直线分别投影到世界坐标系中,根据直线位置关系,对摄像头的外参进行左右方向校准。
[0062]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对所述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0063]
以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术
性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1