一种目标识别方法及远距离激光清洗方法和系统与流程
1.本发明涉及激光清洗技术领域,具体涉及一种目标识别方法及远距离激光清洗方法和系统。
背景技术:
2.变电站绝缘子连接件,刀闸触头等一些金属件长期暴露在室外,漆层会脱落,然后发生锈蚀,所以每年都要花费大量人力物力处理这些锈蚀,目前大都是采用人工除锈,必须要进行断电处理,这对变电站的稳定运行造成极大的影响。
3.激光清洗具有无研磨、非接触、无热效应和适用于各种材质的物体等清洗特点,被认为是最可靠、最有效的解决办法,同时,激光清洗可以解决采用传统清洗方式无法解决的问题。
4.变电站绝缘子瓷瓶、刀闸触头以及各种导电金具由于材料特性不同,激光清洗需要的工艺参数也不同,而目前在清洗时,基本统一采用同一工艺参数进行,效率低,安全性也不高。
技术实现要素:
5.本发明所要解决的技术问题是提供一种目标识别方法及远距离激光清洗方法和系统,以克服上述现有技术中的不足。
6.本发明解决上述技术问题的技术方案如下:一种目标识别方法,包括如下步骤:
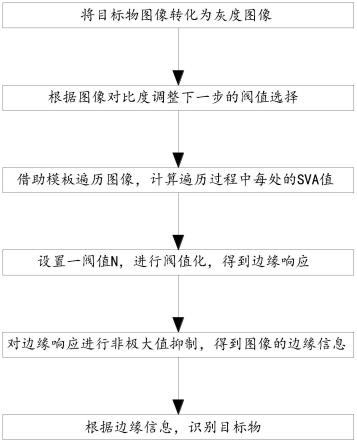
7.s10、将目标物图像转化为灰度图像;
8.s20、根据图像对比度调整下一步的阀值选择;
9.s30、借助模板遍历图像,计算遍历过程中每处的sva值;
10.s40、设置一阀值n,进行阀值化,得到边缘响应;
11.s50、对边缘响应进行非极大值抑制,得到图像的边缘信息;
12.s60、根据边缘信息,识别目标物。
13.在上述技术方案的基础上,本发明还可以做如下改进。
14.进一步,s20中阀值的确定方法如下:
15.确定图像最大灰度值p
max
和最小灰度值p
min
;
16.若p
max-p
min
>100,则阀值t=40~70;
17.若p
max-p
min
<100,则阀值t=10~40。
18.更进一步的,若p
max-p
min
>100,则阀值t=40;
19.若p
max-p
min
<100,则阀值t=20。
20.进一步,s30具体为:
21.s31、用一个模板在图像上移动,并将模板内的每一点的像素与中心像素进行比较,若像素差异值≤t,则模板内该点为有效点,若像素差异值>t,则模板内该点为无效点;
22.s32、将模板内所有有效点进行求和,为am,得到sva值。
23.进一步,s40具体为:
24.若n>am,则表明为边缘位置;
25.若n≤am,则表明为非边缘位置;
26.其中,n=a
max
×
5/6,a
max
为最大sva值。
27.进一步,模板为多边形模板。
28.更进一步,模板为正六边形模板。
29.本发明的有益效果是:
30.1)采用分段阈值策略,图像的对比度较大,则可选取较大的阈值,而图像的对比度较小,则可选取较小的阈值;
31.2)计算速度快,可以应用于实时场景中;
32.3)完全不涉及梯度的运算,因此其抗噪声能力很强,运算量也比较小;
33.4)具有很好的边缘检测性能;
34.5)可适应光线不同的场景拍出的图像;
35.6)正六边形模板适合棱角分明的图像目标识别。
36.基于上述目标识别方法,本发明还提供一种远距离激光清洗方法,包括如下步骤:
37.s100、采集目标物图像;
38.s200、基于所述目标识别方法识别目标物;
39.s300、基于识别结果,执行对应清洗参数,以完成对应目标物的激光清洗。
40.采用上述进一步的有益效果为:通过先分辨目标物,再根据分辨结果执行对应清洗参数,一方面可以确保清洗效率,另一方面不损坏设备。
41.基于上述远距离激光清洗方法,本发明还提供一种远距离激光清洗系统,包括:
42.图像采集模块,用以采集目标物图像;
43.目标识别模块,用以接收图像采集模块所采集的目标物图像,并根据图像识别目标物;
44.控制模块,用以接收目标识别模块的识别结果信息,并对应调用清洗参数;
45.远距离激光清洗模块,依据控制模块所调用的清洗参数执行清洗程序。
46.采用上述进一步的有益效果为:快速准确的识别目标后,调用相应的清洗参数,完成对应目标的激光远距离清洗,提高效率。
附图说明
47.图1为本发明所述目标识别方法的流程图;
48.图2为本发明所述远距离激光清洗方法的流程图;
49.图3为本发明所述远距离激光清洗系统的结构图;
50.图4为模板遍历图像的示意图。
具体实施方式
51.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
52.实施例1
53.如图1所示,一种目标识别方法,包括如下步骤:
54.s10、将目标物图像转化为灰度图像;
55.s20、根据图像对比度调整下一步的阀值选择;
56.s30、借助模板遍历图像,计算遍历过程中每处的sva值;
57.s40、设置一阀值n,进行阀值化,得到边缘响应;
58.s50、对边缘响应进行非极大值抑制,得到图像的边缘信息;
59.s60、根据边缘信息,识别目标物。
60.实施例2
61.本实施例为在实施例1的基础上对其所进行的进一步改进,具体如下:
62.所述s20中阀值的确定方法如下:
63.确定图像最大灰度值p
max
和最小灰度值p
min
;
64.若p
max-p
min
>100,则阀值t=40~70,可以优选为40;
65.若p
max-p
min
<100,则阀值t=10~40,可以优选为20;
66.采用分段阈值策略,图像的对比度较大,则可选取较大的阈值,而图像的对比度较小,则可选取较小的阈值。
67.实施例3
68.本实施例为在实施例2的基础上对其所进行的进一步改进,具体如下:
69.所述s30具体为:
70.s31、用一个模板在图像上移动,并将模板内的每一点的像素与中心像素进行比较,若像素差异值≤t,则模板内该点为有效点(认为该点与中心像素具有相同的灰度,其中,中心像素也被称为核nucleus),满足该条件的像素组成的区域就称为sva(same value area),若像素差异值>t,则模板内该点为无效点;
71.s32、将模板内所有有效点进行求和,为am,得到sva值。
72.用公式表达如下:
[0073][0074]
其中,im是中心像素,i
m0
是模板内的其他像素,t是像素差异阈值。
[0075]
从图4中可看出,d完全在阴影区域外,该模板处的sva是最大的,模板运行到角点处a时,此时的sva值最小,可以得出边缘处的点的sva小于或等于最大值一半,可知在边缘处的值最小,可以根据sva区域的大小来检测边缘特征的位置和方向信息,b代表模板大部分处于阴影区域内,c代表模板完全处于阴影区域内,而阴影区域即为目标区域。
[0076]
实施例4
[0077]
本实施例为在实施例1~3任一实施例的基础上对其所进行的进一步改进,具体如下:
[0078]
所述s40具体为:
[0079]
若n>am,则表明为边缘位置;
[0080]
若n≤am,则表明为非边缘位置;
[0081]
用公式表达如下:
[0082][0083]
其中,n=a
max
×
5/6,a
max
为最大sva值(指遍历过程中所出现的最大sva值),sva值越小,边缘的响应就越强。
[0084]
sva为:模板中心所在像素和模板内所有像素相近的区域大小,模板完全在目标阴影外和模板完全在目标阴影内都是sva最大,求和后可知模板内有多少个和模板中心点相似,称为有效点,比如说:模板完全在目标阴影里时占据100个像素,那么此时就是sva的最大值,并且认为有5/6的值处在目标阴影里,该地方便为它的边缘。实施例5
[0085]
如图4所示,本实施例为在实施例1~4任一实施例的基础上对其所进行的进一步改进,具体如下:
[0086]
模板为多边形模板,更进一步的:模板优选为正六边形模板,采用六边形模板进行像素检测更适合带有棱角的物体识别。
[0087]
对于上述各实施例而言,非极大值抑制为现有技术,故在此不详细赘述原理。
[0088]
实施例6
[0089]
如图2所示,一种远距离激光清洗方法,包括如下步骤:
[0090]
s100、采集目标物图像;
[0091]
s200、基于所述目标识别方法识别目标物;
[0092]
s300、基于识别结果,执行对应清洗参数,以完成对应目标物的激光清洗。
[0093]
实施例7
[0094]
如图3所示,一种远距离激光清洗系统,包括:
[0095]
图像采集模块、目标识别模块、控制模块和远距离激光清洗模块;
[0096]
图像采集模块的信号输出端与目标识别模块的信号输入端电连接,目标识别模块的信号输出端与控制模块的信号输入端电连接,控制模块的信号输出端与远距离激光清洗模块的信号输入端电连接;
[0097]
图像采集模块可以优选为相机,而控制模块可以优选为处理器,目标识别模块执行上述目标识别方法进行目标识别;
[0098]
其中,图像采集模块,用以采集目标物图像;
[0099]
目标识别模块,用以接收图像采集模块所采集的目标物图像,并根据图像识别目标物;
[0100]
控制模块,用以接收目标识别模块的识别结果信息,并对应调用清洗参数;
[0101]
远距离激光清洗模块,依据控制模块所调用的清洗参数执行清洗程序。
[0102]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1