一种基于农业物联网的元宇宙交互系统及其方法与流程
1.本发明属于元宇宙技术领域,尤其涉及一种基于农业物联网的元宇宙交互系统及其方法。
背景技术:
2.农业物联网系统利用温度传感器、湿度传感器、ph值传感器、电导率传感器、光照度传感器、co2传感器等设备,检测环境中的温度、相对湿度、ph值、ec值、光照强度、土壤养分、co2浓度等物理量参数,并通过系统处理,保证农作物有一个良好的、适宜的生长环境。元宇宙是把现实世界中采集的静态数据和动态数据投送到虚拟世界的构成设计中,形成一个在同一时间轴上与现实世界平行的虚拟世界。农业物联网在国内已经获得广泛应用。元宇宙建立虚拟世界,提供“虚拟人”与人类互动,人类也可以“化身”为“虚拟人”,在虚拟世界里互相交流,甚至可以进行商业活动,如举行会议、签订合同等,中国专利《一种元宇宙系统》(申请日:2021.12.12,申请号:202111513293.x,申请公布号:cn114359519a)已有公开,此外,中国专利《基于dikwp模型的元宇宙虚拟交互方法》(申请日:2021.12.31,申请号:202111675871.x,申请公布号:cn114359523 a)、外国申请人于中国申请《元宇宙数据融合系统》(申请日:2020.05.15,申请号:202080041118.2,申请公布号:cn 114223008a)也有应用。农业物联网和元宇宙两方面,技术均成熟,但是目前国内外暂无把两者结合起来形成一个适用于农村或者农业土地上新系统的技术方案。
技术实现要素:
3.针对上述现有技术存在的缺陷,本发明提供一种基于农业物联网的元宇宙交互系统及其方法。
4.为了实现以上目的,本发明采用的技术方案为:一种基于农业物联网的元宇宙交互系统,包括农业物联网架构单元和虚拟交互单元,所述的农业物联网采集现实农田的动态数据,所述的数据包括农田地形图,所述的农业物联网架构单元包括感知层、网络层和应用层,农业物联网采集的数据传输至虚拟交互单元,所述的虚拟交互单元包括展示互动层和执行机构层;所述的展示互动层展示虚拟农田、监测数据、人机互动;所述的执行机构层执行虚拟交互单元下达指令。
5.进一步的,感知层采集数据通过网络层传输至应用层,所述的应用层依据农田地形图数据搭建虚拟农田环境。
6.进一步的,所述的展示互动层的设备包括3d环幕模块、vr眼镜和人体穿戴设备;所述的人体穿戴设备中搭载人体动作传感器;
7.所述的执行机构层的设备包括无人植保机、水肥一体化自动灌溉设备及农机协作单元。
8.再进一步的,所述的感知层上的感知设备包括农情哨兵采集端、农情无人侦察机、农情气象站,感知层的感知设备上设置数据采集设备;所述的数据采集设备包括温度、湿
度、电导率、ph值传感器,rfid设备,视频监控设备;所述的农情无人侦察机飞巡全域农田或抵近侦察无农情哨兵采集端农田区域;所述的农情气象站获得当地气象数据;农机协作单元的农机上设置gps定位装置和动作传感器;
9.所述的网络层通过lan或wlan或4g或5g或wifi构成高速网络系统;
10.所述的应用层包括服务器和路由器、交换机、防火墙网络设备构成的企业网络,网络设备与因特网互联,还包括虚拟农田的演示和人机互动模块、农情传感器的数据收集及存储模块,所述的虚拟农田的演示和人机互动模块与展示互动层互联。
11.再进一步的,感知设备和/或执行机构层的设备所设区域布置gps基准站,gps基准站采集的载波相位发给感知设备和/或执行机构层的设备的用户接收机。
12.再进一步的,所述的农情哨兵采集端采集的数据包括土壤墒情的数据,样株生长数据和健康状态数据;所述的农情无人侦察机采集的数据包括农作物生长情况数据和病虫害灾情数据;所述的农情气象站采集的数据包括当地气象数据。
13.再进一步的,所述的应用层还包括农业生产环境监测和优化单元、农事安排单元、农作物病虫害识别与治理单元、农情预测单元;
14.所述的农业生产环境监测和优化单元上包括农作物成熟度研判模块和ar测量模块;所述的农事安排单元采用决策树模型;所述的农作物病虫害识别与治理单元上包括基于机器视觉的农作物病虫害检测模块;所述的农情预测单元包括气象灾害预测分析模块;
15.所述的气象灾害预测分析模块的数据包括农情哨兵采集端提供gps坐标位置、实时土壤墒情数据;土壤墒情历年数据集;农情气象站数据;降雨量阈值;降雨量阈值。
16.再进一步的,所述的农情传感器的数据收集及存储模块储存应用层收集从农情哨兵采集端传来的土壤墒情数据包及图片/影像资料、农情无人侦察机传来的图片/影像资料、农情气象站传来的气象数据包、水肥一体化自动灌溉设备的施肥、施药量动态数据。
17.一种基于农业物联网的元宇宙交互方法,
18.所述的农作物成熟度研判模块采用农作物成熟度研判使用色卡比较发、农作物果实尺寸/色卡比较法:
19.其中,农作物成熟度色卡库z1{r,g,b}、果实成熟度色卡库z2{r,g,b}和果实成熟度尺寸库r2{x,y};
20.农情无人侦察机飞巡农田拍摄图片,通过对比色卡库数据,确定农作物成熟度;和/或通过农情哨兵采集端微距拍摄样株照片,并通过ar测量模块获得农作物果实尺寸,对比色卡库数据、果实成熟度尺寸库的果实颜色、尺寸确定农作物成熟度;
21.所述的基于机器视觉的农作物病虫害检测模块,执行包括以下步骤:
22.1)、图像采集:
23.农情哨兵采集端采集样株的图片,通过网络传送至应用层;
24.2)、图像预处理:
25.应用层使用边缘检测分割方法,利用边缘检测滤波器检测叶片图像的边缘,增强图像,对图片进行对比度变换、颜色扰动、高斯噪声、缩放、旋转、仿射变换处理;
26.3)、提取图像特征,获取特征向量:
27.对图像颜色特征、hsv特征、纹理特征、方向梯度直方图特征,使用大数据聚类分析,获取图像的特征向量;
28.4)、病虫害分析:
29.根据获得的图像的特征向量和从拍摄的众多农作物叶片图像中随机选择若干张建立模型训练的样本库,在支持向量机模型、循环神经网络模型以及卷积神经网络模型中进行对比分析将健康叶片、某种病虫害叶片进行精细分析;
30.所述的气象灾害预测分析模块上设置触发模块,当采集数据超出阈值,触发模块启动。
31.进一步的,所述的hsv特征包括色调h、饱和度s和亮度v;
32.所述的土壤墒情数据计算式:
33.θ
a,t+1
=к
t
(θ
a,t
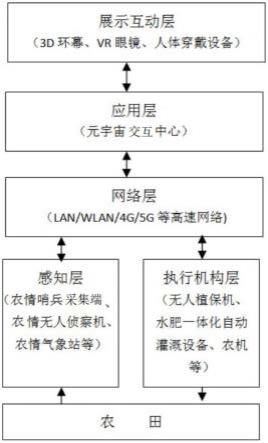
+р
t
+φ
t
)
34.θ为墒情指数,为土壤含水量,t为日期,р为降水量,φ为灌水量,к为土壤水分消减指数。
35.本发明的技术效果在于:本发明的一种农情元宇宙(交互)系统在农村土地上进行的生产、经营活动,在尺寸之间以虚拟世界的方式展示,缩短了时空距离,形式新颖、生动、直观,映射现实世界的内容真实、准确。同时推动了农业生产的高效化、精细化、绿色化发展,改善农业生态环境,改造升级农业产业链,提高农业管理水平,为可持续农业发展作出贡献。
附图说明
36.图1为本发明系统的构造图,图中箭头表示数据传输方向;
37.图2为本发明的农事安排单元的一个具体决策树模型图;
38.图3为本发明现场状态的构造图。
具体实施方式
39.以下将对本发明各实施例的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例;基于本发明的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施例,都属于本发明所保护的范围。
40.本发明涉及的元宇宙系统为一种农情元宇宙(交互)系统,该农情元宇宙(交互)系统是元宇宙(交互)在农业生产管理中的应用,是农业物联网和元宇宙(交互)结合形成的一种系统。农业物联网采集现实农田的动态数据,元宇宙(交互)系统(即虚拟交互单元)利用这些数据和农田地形图,使用视觉沉浸技术,把现实世界的农田映射成为同一时间轴上虚拟世界的“虚拟农田”,并实施农事管理。
41.具体的,农业物联网架构单元为三层,(物联网)感知层、(物联网)网络层和(物联网)应用层。农情元宇宙(交互)的虚拟交互单元为了展示虚拟农田、监测数据、人机互动的需要,增加了展示互动层,且为了下达指令进行农事活动,增加执行机构层。从拓扑机构上来说:农业物联网(架构单元)是一个需要人工干预的开环监测监控系统,而农情元宇宙(交互)的虚拟交互单元是一个全自动的闭环监测监控系统。这样形成的农业物联网与元宇宙(交互)结合,构成农情元宇宙(交互)系统,形成有生动、沉浸式的人机互动界面,全自动的农事管理,提高了农业生产管理的现代化水平。
42.具体的,本发明的农情元宇宙(交互)系统(即虚拟交互单元)构建在农业物联网系统的基础上,架构设计为五层:(物联网)感知层、(物联网)网络层、(物联网)应用层、展示互动层和执行机构层,如图1所示。
43.所述的感知层主要是由农情哨兵采集端、农情无人侦察机、农情气象站等构成,搭载着温度、湿度、电导率、ph值等传感器、rfid设备、视频监控设备等数据采集设备。农情哨兵采集端是固定式农情感知设备,按照实际所需的密度布置在农田中,采集土壤墒情数据,监视样株生长数据和健康状态数据。农情无人侦察机飞巡全域农田或抵近侦察无农情哨兵采集端农田区域,观察(采集)农作物生长情况数据和病虫害灾情数据。农情气象站(采集)获得当地气象数据。所述的网络层通过lan,wlan,4g/5g构成高速网络系统,实现现场数据信息和上层控制命令实时准确地传输与交互。所述的应用层主要包括农业生产环境监测和优化单元、农事安排单元、农作物病虫害识别与治理单元、农情预测单元等农业应用系统,这样,构成一个农情元宇宙(交互)系统(即虚拟交互单元),实现对由感知层采集的海量数据进行分析和处理,以及对农业生产现场的智能化控制与管理。
44.展示互动层(的设备)包括3d环幕模块、vr眼镜、人体穿戴设备(包括人体动作传感器),用于展示虚拟农田和人机互动。执行机构层(的设备)包括无人植保机、水肥一体化自动灌溉设备及农机协作单元,执行元宇宙(交互)系统(即虚拟交互单元)下达指令,实施对农作物生长环境进行优化,农田耕作、灌溉、施肥、收获等农事活动的执行。
45.本发明的一种农情元宇宙(交互)系统在农村土地上进行的生产、经营活动,在尺寸之间以虚拟世界的方式展示,缩短了时空距离,形式新颖、生动、直观,映射现实世界的内容真实、准确。同时结合视觉沉浸技术、4g/5g技术、大数据技术、人工智能等技术,推动了农业生产的高效化、精细化、绿色化发展,改善农业生态环境,改造升级农业产业链,提高农业管理水平,为可持续农业发展作出贡献。
46.再次参照附图,本发明的具体的一种农情元宇宙(交互)系统包括农情元宇宙(交互)中心(即应用层),虚拟农情管家单元(即展示互动层),农情无人侦察机、无人植保机、农情哨兵采集端(即感知层),农情气象站、水肥一体化自动灌溉设备及农机协作单元(即执行机构层)。
47.应用层的硬件上包括一组服务器和路由器、交换机、防火墙等网络设备构成的企业网络(intranet),(网络设备)并与因特网互联。并具有与3d环幕、vr眼镜、人体穿戴动作捕获等设备连接虚拟农田的演示和人机互动模块(即与展示互动层互联),用于虚拟农田的演示和人机互动。
48.进一步的说明,农情元宇宙(交互)中心(即应用层)依据地形图和农田的范围,搭建虚拟农田环境,包括田块、田间道路、机耕路、沟渠、桥梁、涵洞、防护林等。这样,可以在3d环幕/vr眼镜观察虚拟农田,穿上人体穿戴设备,(人体穿戴)设备中搭载人体动作传感器,捕获人们的动作,这样就可以在虚拟农田中漫游,可以看到农情哨兵采集端的位置标注着土壤墒情的数据,农情无人侦察机、无人植保机从天空中飞过,虚拟农田里各种农机正在耕作。
49.农情传感器的数据收集及存储模块储存元宇宙(交互)中心(即应用层)收集从农情哨兵采集端传来的土壤墒情数据包及图片/影像资料、农情无人侦察机传来的图片/影像资料、农情气象站传来的气象数据包、水肥一体化自动灌溉设备的施肥、施药量等动态数
据,并存储设定历史阶段的数据,用于农产品追溯、历史数据对比和数据挖掘。
50.再进一步的说明带来额技术效果,农事活动的规划及安排:
51.根据事先制定的农业生产预案,元宇宙(交互)中心(即应用层)在设定的时间节点上安排农事活动。如根据计划种植的农作物的不同种类,在耕地、播种、灌溉、施肥、收获时节,预先从因特网上获取当地15天内的天气预报,根据天气情况及时租用或出动相关的农机。再如可以根据需要,在因特网上自动订购种子、农药、化肥等农业生产资料的品种和数量。
52.再进一步的说明带来的技术效果,基于机器视觉的农作物生长情况判断与应对:
53.对农作物生长情况的判断主要从两个方面:一是农作物的生长情况可以体现在大片农作物的色彩上,利用机器视觉原理和农情无人侦察机传来的图片/影像资料,与田块历史拍摄的图片/影像资料纵向进行比较,与周边田块的色彩横向进行比较,判断田块的农作物长势的优劣。另一方面可以对样株进行观察,样株是农情哨兵采集端附近几株农作物,生长环境和周边的农作物一致,只是其位置比较利于农情哨兵采集端进行拍摄和观察。利用机器视觉,分析样株及果实尺寸、形状、色彩、光泽度等参数,也能获得农作物的生长情况。再从该田块的农情哨兵采集端传来的土壤墒情数据,分析土壤缺水、缺肥的情况,产生对应的水肥配比,指挥水肥一体化自动灌溉设备对相应田块进行灌溉。
54.再进一步的说明带来的技术效果,基于机器视觉的农作物虫害识别与应对:
55.农情哨兵采集端的摄像设备捕获微小物体运动,可以对空中、植株上运动的虫类进行跟踪拍摄。元宇宙(交互)中心(即应用层)根据这些图片/影像资料,利用机器视觉分析虫类的种类、数量、分布、密度和范围,以及观察植株受损情况,判断虫害的严重程度,指挥无人植保机按照一定配比配置农药,对指定区域农田进行喷洒。
56.再进一步的说明带来的技术效果,基于机器视觉的农作物病害识别与应对:
57.农作物产生病害,在植株上相应部位的色彩、形状上会有所反映,比如植株的叶片出现变形、白粉、煤污、锈粉、霜霉等。在农情哨兵采集端传来的图片/影像资料中,机器视觉技术可以把病害植株从正常植株中分辨出来。通过对比与识别,确定农作物病害的种类和使用农药配比,再由农情无人侦察机抵进侦察,确定农药的喷洒范围,指挥无人植保机进行农药的喷洒。
58.再进一步的说明带来的技术效果,基于大数据分析、人工智能技术的农情预测:
59.利用采集的历史数据、农艺经验和相应的数学模型等,采用大数据分析、人工智能技术进行农情预测,并在虚拟农田上标识预测结果。例如农作物生长情况预测:观测农作物生长情况,结合气象因子和农田土壤墒情数据,预测农作物成熟时期、农作物收成,及时安排收获和销售;病虫害灾情影响预测:发现农作物病虫害后,从病虫害的发生范围、种类、数量,预测病虫害给农作物造成损失情况,在虚拟农田标识病虫害损失的影响范围和损失程度;气象灾害损失预测:如遇见百年不遇的旱灾、水灾、雪灾等情况,根据农情气象站数据和从因特网获取的天气预报,结合农田地形,预测极端天气可能造成损失情况,在虚拟农田标识受灾范围和程度。
60.再进一步的说明带来的技术效果,对农作物生长环境的优化:
61.根据农情哨兵采集端上传的数据,元宇宙(交互)中心(即应用层)可以根据农田中不同农作物、不同生长时期的需水、需肥特点,以及不同农田区域的土壤环境和养分含量状
况,动态调整水肥配比,下指令给水肥一体化自动灌溉设备,对指定区域的农田进行灌溉,使农作物主要根系土壤始终保持疏松、适宜的含水量和土壤肥力,保证农作物优良的生长环境。
62.再进一步的说明带来的技术效果,农田尾水“双残检测”及处理:
63.对集水沟、集水井中的农田尾水进行农药、肥料含量实时监测。对于不达标的农田尾水,不能直接排放到自然水体。一般采用两种办法处理农田尾水:一是启动农田尾水复用设备,将尾水沉淀、净化、过滤后重新利用。二是启动水泵排入人工湿地,利用湿地中植物进行吸收降解尾水中的农药、肥料。
64.再进一步的说明带来的技术效果,对控制中心的技术效果:
65.通过数据链控制农情无人侦察机定时按规划路径巡航拍摄农田图片/影像资料,也可以控制农情无人侦察机去指定地点抵近侦察;控制农情哨兵采集端通过云台的调整,观察样株的生长情况;控制水肥一体化自动灌溉设备按照指定的水肥配比对指定农田进行灌溉;启动农田尾水复用设备等。
66.再进一步的说明带来的技术效果,提供数据至农业管理系统的接口:
67.通过数据接口向管理部门提供农业企业生产和经营的有关数据,如农药、化肥、种子等农资的来源、品种、使用量、使用时间;使用农机型号、农机证、机手姓名、作业时间等;农产品的品种、产出量、销售量等。依据这些数据对全域农业生产情况进行监测,开展农资、农产品的追溯工作,控制农业面源污染,保证生态平衡,调整农业政策,以保证农业生产的健康发展。
68.虚拟农情管家单元(即展示互动层)是元宇宙虚拟世界中的一个“虚拟人”,提供一个人机交互生动形式。虚拟农情管家单元(即展示互动层)采用语音识别/合成技术、机器视觉技术、3d全息投影技术,可以使用自然语言、肢体语言跟其交谈。如听取农业生产情况汇报,调整农业生产预案中安排,下指令调取相关图片/影像资料等。
69.下面是执行机构层的具体说明:
70.农情无人侦察机:是用于侦察农业生产的情况。其包括高精度的定位系统、高分辨率的摄像/照相机,长时间的续航、微距摄影。在农业生产过程中,它每日定时飞越全域农田,拍摄高清晰度照片,并将照片通过4g/5g/wifi网络,传送到农情元宇宙(交互)中心(即应用层)进行分析。农情元宇宙(交互)中心(即应用层)依据影像分析,如发现可能发生了农作物病虫灾害,需要抵近侦察,就会给出需要侦察地点的经纬度坐标。农情无人侦察机接到坐标数据,自动飞行到指定地点进行抵近侦察,拍摄现场的微距影像,以供农情元宇宙(交互)中心(即应用层)验证分析结果,采取应对措施。
71.无人植保机:使用在现代农业生产中,主要由飞行平台(固定翼、直升机、多轴飞行器)、导航飞控、喷洒机构三部分组成。还包括电池自动安装/卸载机构。药剂/粉剂自动配比、通过罐装机构(罐装)后,无人植保机实现工作全程无人工干预。无人植保机通过4g/5g网络,接收农情元宇宙(交互)中心(即应用层)安排的规划路线,对指定区域农田喷洒药剂、种子、粉剂。
72.农情哨兵采集端:按照所需设定的密度设置在农田内,搭载着传感器,检测空气温度、空气相对湿度、土壤ph值、土壤ec值、土壤温度、土壤水分、co2浓度等物理参数,形成土壤墒情数据包,通过4g/5g网络传送至元宇宙(交互)中心(即应用层)。同时农情哨兵采集端
搭载高清晰摄像设备,不仅可以对农作物样株进行全景微距拍摄,观察样株的生长情况和健康情况,还可以对微小运动物体捕获和拍摄,将相关图片、影像发往元宇宙(交互)中心(即应用层),供元宇宙(交互)中心(即应用层)分析农作物生长情况、健康情况和农作物病虫害检测。
73.农情气象站:采集农田日照强度、日照时间、降雨量、气压、风向、风速/风力等级等气象参数,形成气象数据包,通过4g/5g网络传送至元宇宙(交互)中心(即应用层),进行农作物生长的气象环境分析。
74.水肥一体化自动灌溉设备:接受元宇宙(交互)中心(即应用层)的指令,按照指令要求,自动进行可溶性固体或液体肥料和灌溉水的配比,对指定区域的农田进行均匀、定时、定量地灌溉。
75.农机协作单元:农机协作单元的各类农机安装gps定位装置和动作传感器,并有数据链连接元宇宙(交互)中心(即应用层),以显示在作业时农机在农田中的位置、动作。
76.基于上述感知设备和执行机构(层的设备),设置gps基准站。农情无人侦察机、无人植保机和农机等设备工作时,需要高精度厘米级别的定位功能。为了提供给无人机、农机等设备高精度定位,建设一个或若干个gps基准站,这些gps基准站的经纬度坐标经实地测绘,精度达到毫米级别。采用rtk(real-time kinematic,实时动态)载波相位差分技术,将gps基准站采集的载波相位发给无人机、农机上的用户接收机,进行求差解算坐标,以使无人机、农机的定位精度达到厘米级别。
77.本发明的一种基于农业物联网的元宇宙交互系统能够以步行/车行/飞行器的视角漫步虚拟农田之中,可以直接看到农田的土壤墒情数据,抵进观察农作物的生长情况;农情无人侦察机按时飞抵农田,农情哨兵采集端24小时不间断地监视,农作物的生长状态了然于目;无人植保机随时待命起飞,防治农作物病虫害;水肥一体化自动灌溉设备保证了农作物良好的生长环境。
78.进一步的,有关技术要点的说明:
79.农业生产环境监测和优化单元的农作物成熟度研判模块:采用农作物成熟度研判使用色卡比较发、农作物果实尺寸/色卡比较法。
80.其中,农作物成熟度色卡库z1{r,g,b}、果实成熟度色卡库z2{r,g,b}和果实成熟度尺寸库r2{x,y}。
81.色卡库和尺寸库建库方法:一是通过一个农作物生长周期,由人工指令确定,机器自学习建立。二是人工输入图片、数据确定。
82.本发明系统一方面通过农情无人侦察机飞巡农田拍摄图片,通过对比色卡库数据,确定农作物成熟度;另一方面通过农情哨兵采集端微距拍摄样株照片,并通过ar测量模块获得农作物果实尺寸,对比色卡库数据、果实成熟度尺寸库的果实颜色、尺寸确定农作物成熟度。
83.农事安排单元:采用决策树模型,农事根据年度计划、田块种植历史,农作物种植时节、历年种植经验数据,安排种植相应农作物或者、休耕养地。主要方法是以田块划分为决策枝,农作物为决策项,通过机器学习历年农作物的种植样本数据,生成一个带时间轴的最优决策树来安排农事活动。
84.基于机器视觉的农作物病虫害检测模块,其执行包括以下步骤:
85.1)、图像采集:
86.农情哨兵采集端采集样株的图片,通过4g/5g网络传送农情元宇宙(交互)中心(即应用层);
87.2)、图像预处理:
88.农情元宇宙(交互)中心(即应用层)使用边缘检测分割方法,利用边缘检测滤波器检测叶片图像的边缘。增强图像,对图片进行对比度变换、颜色扰动、高斯噪声、缩放、旋转、仿射变换(方法)处理。
89.3)、提取图像特征,获取特征向量:
90.对图像颜色特征、hsv特征(色调h、饱和度s和亮度v)、纹理特征、方向梯度直方图特征,使用大数据聚类分析,获取图像的特征向量。
91.4)、病虫害分析:
92.根据获得的图像的特征向量和从拍摄的众多农作物叶片图像中随机选择若干张建立模型训练的样本库,在支持向量机模型、循环神经网络模型以及卷积神经网络模型中进行对比分析将健康叶片、某种病虫害叶片进行精细分析。
93.气象灾害预测分析模块,其执行:
94.气象灾害预测主要依据数据及数据的作用:(1)、农情哨兵采集端提供gps坐标位置、实时土壤墒情数据(地下50cm、20cm、10cm);(2)、土壤墒情历年数据集;(3)、农情气象站提供近期气象数据,近期累计降雨量;(4);历年气象数据,按年、月累计降雨量;(5)、蓄水塘实时水位、高位警戒水位(水灾、低位警戒水位(旱灾);(6)、客水来源、由外部区域流入区域的雨水(水灾)、可由外部提供客水(旱灾)数据;(7)、指定时期最低降雨量阈值(可能引起旱灾)、指定时期最高降雨量阈值(可能引起水灾);(8)、地区年蒸发量数据;(9)、农田地形图(等高线)。
95.气象灾害分析触发条件:(1)、降雨量超出阈值;(2)、蓄水塘水位超出阈值;(3)、客水影响:雨季降雨量大引起外来客水、旱季无外来客水;
96.以旱情预测为例:
97.即旱情评估指标体系:旱情等级分为轻度干旱、中度干旱、严重干旱和特大干旱4个等级。以降水量、灌水量、连续无雨日、土壤湿度、地下水水位等划分。
98.土壤墒情(数据)指数计算式:
99.θ
a,t+1
=к
t
(θ
a,t
+р
t
+φ
t
)
100.θ为墒情指数,为土壤含水量,t为日期,р为降水量,φ为灌水量,к为土壤水分消减指数,反映土壤特性、农作物生长需水情况、气象影响。
101.进行多指标综合分析,使用频次法,以发生频次高的等级为最后综合分析结果。
102.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1