一种车辆行为识别方法及装置与流程
本公开涉及车辆控制领域,具体涉及一种车辆行为识别方法及装置。
背景技术:
1、在现有技术中,用户在开车的过程中前车在特定条件下会有左转和前车左转和调头这两种情况,且左转和调头需要采取不同的应对方案,因此用户需要对这两种行车方式进行预判。然而,由于左转和调头的前车行为较为相似,因此人工进行行为预判时,会存在预判错误可能性,进而导致采用错误的跟车方式,给用户带来一定的安全隐患。
技术实现思路
1、有鉴于此,本公开实施例提供了一种车辆行为识别方法及装置,用于准确识别前车将要左转还是将要调头,提升车辆的安全性。
2、为了实现上述目的,本公开实施例提供技术方案如下:
3、第一方面,本公开实施例提供了一种车辆行为识别方法,包括:
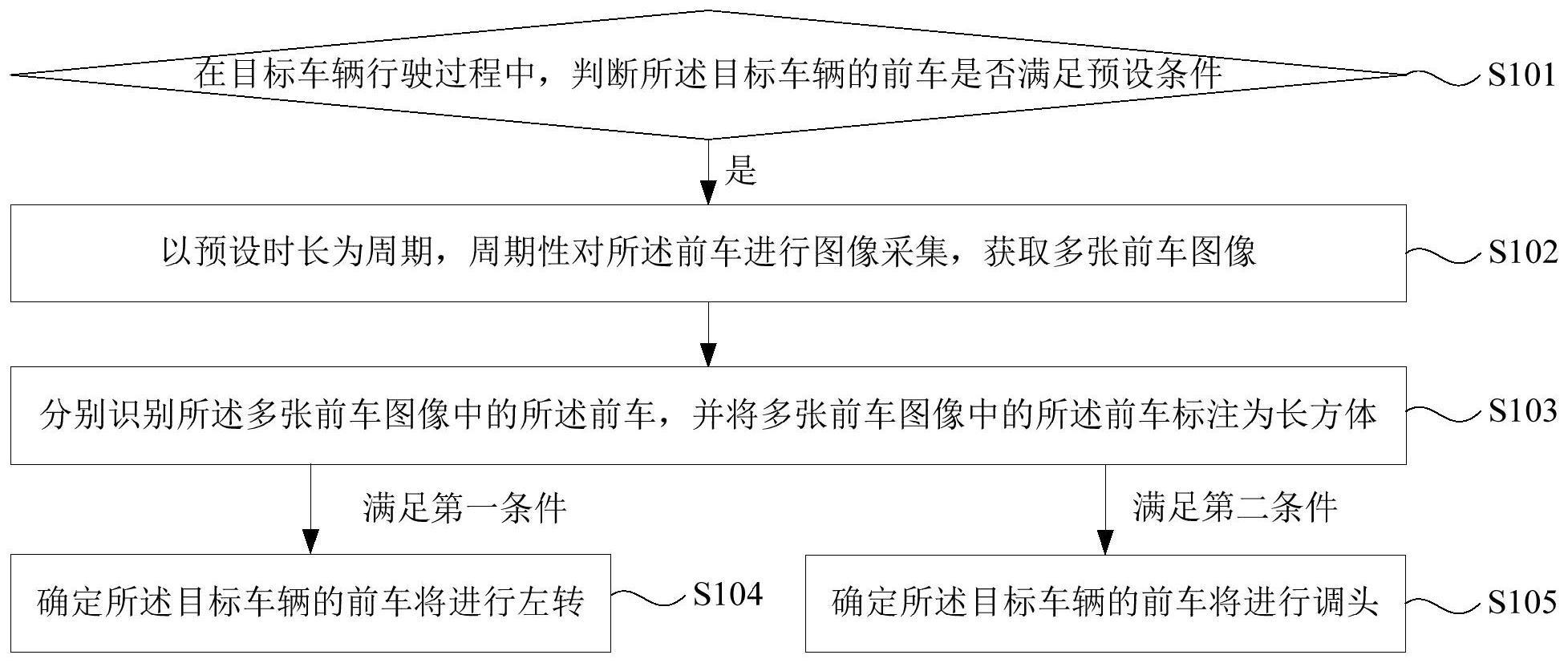
4、在目标车辆行驶过程中,判断所述目标车辆的前车是否满足行为识别条件;
5、若是,则以预设时长为周期,周期性对所述前车进行图像采集,获取多张前车图像;
6、分别识别所述多张前车图像中的所述前车,并将多张前车图像中的所述前车标注为长方体;
7、若所述多张前车图像中标注的所述长方体上用于表征所述前车的背面上的顶点之间的像素距离和左侧面上的顶点之间的像素距离的化趋势满足第一条件,则确定所述目标车辆的前车将进行左转;
8、若所述多张前车图像中标注的所述长方体上用于表征所述前车的背面上的顶点之间的像素距离、左侧面上的顶点之间的像素距离以及右侧面上的顶点之间的像素距离的化趋势满足第二条件,则确定所述目标车辆的前车将进行调头。
9、作为本公开实施例一种可选的实施方式,所述第一条件,包括:
10、按照图像采集顺序,所述多张前车图像中标注的所述长方体的第一顶点和第二顶点之间的像素距离依次减小,且所述多张前车图像中标注的所述长方体的第三顶点和第四顶点之间的像素距离依次增大;
11、其中,所述第一顶点和所述第二顶点分别为所述长方体上用于表征所述前车的背面的表面上水平高度相同的两个顶点;所述第三顶点和所述第四顶点分别为所述长方体上用于表征所述前车的背面的表面上水平高度相同的两个顶点。
12、作为本公开实施例一种可选的实施方式,所述第二条件,包括:
13、按照图像采集顺序,所述多张前车图像中标注的所述长方体的第一顶点和第二顶点之间的像素距离先依次减小,再依次增大,再依次减小,所述多张前车图像中标注的所述长方体的第三顶点和第四顶点之间的像素距离依次增大,所述多张前车图像中标注的所述长方体的第五顶点和第六顶点之间的像素距离先依次增大,再依次减小;
14、其中,所述第一顶点和所述第二顶点分别为所述长方体上用于表征所述前车的背面的表面上水平高度相同的两个顶点;所述第三顶点和所述第四顶点分别为所述长方体上用于表征所述前车的左侧面的表面上水平高度相同的两个顶点;所述第五顶点和所述第六顶点分别为所述长方体上用于表征所述前车的右侧面的表面上水平高度相同的两个顶点。
15、作为本公开实施例一种可选的实施方式,所述判断所述目标车辆的前车是否满足行为识别条件,包括:
16、获取所述目标车辆的前车的位置信息;
17、根据所述位置信息确定所述目标车辆的前车是否行驶于左转和调头合用车道;
18、若确定所述目标车辆的前车行驶于左转和调头合用车道,则确定所述前车满足所述行为识别条件。
19、作为本公开实施例一种可选的实施方式,所述判断所述目标车辆的前车是否满足行为识别条件,包括:
20、获取所述目标车辆的前车的位置信息;
21、根据所述位置信息确定所述目标车辆的前车是否行驶于最左侧车道;
22、若确定所述目标车辆的前车行驶于最左侧车道,则确定所述目标车辆的前车的左转向灯是否处于开启状态;
23、若确定所述目标车辆的前车的左转向灯处于开启状态,则确定所述前车满足所述行为识别条件。
24、作为本公开实施例一种可选的实施方式,所述方法还包括:
25、当确定所述目标车辆的前车将进行左转时,通过第一控制策略对所述目标车辆进行控制;
26、当确定所述目标车辆的前车将进行调头时,通过第二控制策略对所述目标车辆进行控制。
27、作为本公开实施例一种可选的实施方式,
28、所述通过第一控制策略对所述目标车辆进行控制,包括:控制所述目标车辆与所述前车保持第一车距;
29、所述通过第二控制策略对所述目标车辆进行控制,包括:控制所述目标车辆与所述前车保持第二车距;
30、其中,所述第一车距大于所述第二车距。
31、第二方面,本公开实施例提供了一种车辆行为识别装置,包括:
32、处理单元,用于在目标车辆行驶过程中,判断所述目标车辆的前车是否满足行为识别条件;
33、图像采集单元,用于在所述目标车辆的前车满足所述行为识别条件的情况下,则以预设时长为周期,周期性对所述前车进行图像采集,获取多张前车图像;
34、图像标注单元,用于分别识别所述多张前车图像中的所述前车,并将多张前车图像中的所述前车标注为长方体;
35、行为识别单元,用于在所述多张前车图像中标注的所述长方体上用于表征所述前车的背面上的顶点之间的像素距离和左侧面上的顶点之间的像素距离的化趋势满足第一条件的情况下,确定所述目标车辆的前车将进行左转;在所述多张前车图像中标注的所述长方体上用于表征所述前车的背面上的顶点之间的像素距离、左侧面上的顶点之间的像素距离以及右侧面上的顶点之间的像素距离的化趋势满足第二条件的情况下,确定所述目标车辆的前车将进行调头。
36、作为本公开实施例一种可选的实施方式,所述行为识别单元,具体用于在按照图像采集顺序所述多张前车图像中标注的所述长方体的第一顶点和第二顶点之间的像素距离依次减小,且所述多张前车图像中标注的所述长方体的第三顶点和第四顶点之间的像素距离依次增大的情况下,确定所述前车将进行左转;
37、其中,所述第一顶点和所述第二顶点分别为所述长方体上用于表征所述前车的背面的表面上水平高度相同的两个顶点;所述第三顶点和所述第四顶点分别为所述长方体上用于表征所述前车的背面的表面上水平高度相同的两个顶点。
38、作为本公开实施例一种可选的实施方式,所述行为识别单元,具体用于在按照图像采集顺序所述多张前车图像中标注的所述长方体的第一顶点和第二顶点之间的像素距离先依次减小,再依次增大,再依次减小,所述多张前车图像中标注的所述长方体的第三顶点和第四顶点之间的像素距离依次增大,所述多张前车图像中标注的所述长方体的第五顶点和第六顶点之间的像素距离先依次增大,再依次减小的情况下,确定所述前车将进行调头;
39、其中,所述第一顶点和所述第二顶点分别为所述长方体上用于表征所述前车的背面的表面上水平高度相同的两个顶点;所述第三顶点和所述第四顶点分别为所述长方体上用于表征所述前车的左侧面的表面上水平高度相同的两个顶点;所述第五顶点和所述第六顶点分别为所述长方体上用于表征所述前车的右侧面的表面上水平高度相同的两个顶点。
40、作为本公开实施例一种可选的实施方式,所述处理单元,具体用于获取所述目标车辆的前车的位置信息;根据所述位置信息确定所述目标车辆的前车是否行驶于左转和调头合用车道;若确定所述目标车辆的前车行驶于左转和调头合用车道,则确定所述前车满足所述行为识别条件。
41、作为本公开实施例一种可选的实施方式,所述处理单元,具体用于获取所述目标车辆的前车的位置信息;根据所述位置信息确定所述目标车辆的前车是否行驶于最左侧车道;若确定所述目标车辆的前车行驶于最左侧车道,则确定所述目标车辆的前车的左转向灯是否处于开启状态;若确定所述目标车辆的前车的左转向灯处于开启状态,则确定所述前车满足所述行为识别条件。
42、作为本公开实施例一种可选的实施方式,所述车辆行为识别装置,还包括:
43、控制单元,用于当确定所述目标车辆的前车将进行左转时,通过第一控制策略对所述目标车辆进行控制;当确定所述目标车辆的前车将进行调头时,通过第二控制策略对所述目标车辆进行控制。
44、作为本公开实施例一种可选的实施方式,所述控制单元,具体用于当确定所述目标车辆的前车将进行左转时,控制所述目标车辆与所述前车保持第一车距;用于当确定所述目标车辆的前车将进行调头时,控制所述目标车辆与所述前车保持第二车距;
45、其中,所述第一车距大于所述第二车距。
46、第三方面,本公开实施例提供了一种电子设备,包括:存储器和处理器,所述存储器用于存储计算机程序;所述处理器用于在执行计算机程序时,使得所述电子设备实现上述任一实施例所述的车辆行为识别方法。
47、第四方面,本公开实施例提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,当所述计算机程序被计算设备执行时,使得所述计算设备实现上述任一实施例所述的车辆行为识别方法。
48、第五方面,本公开实施例提供了一种车辆,包括:第二方面提供的车辆行为识别装置或第三方面提供的电子设备。
49、本公开实施例提供的车辆行为识别方法包括:在目标车辆行驶过程中,判断所述目标车辆的前车是否满足行为识别条件;若所述目标车辆的前车满足所述行为识别条件,则以预设时长为周期,周期性对所述前车进行图像采集,获取多张前车图像;并分别识别所述多张前车图像中的所述前车,并将多张前车图像中的所述前车标注为长方体,以及所述多张前车图像中标注的所述长方体上用于表征所述前车的背面上的顶点之间的像素距离和左侧面上的顶点之间的像素距离的化趋势满足第一条件时,确定所述目标车辆的前车将进行左转;在所述多张前车图像中标注的所述长方体上用于表征所述前车的背面上的顶点之间的像素距离、左侧面上的顶点之间的像素距离以及右侧面上的顶点之间的像素距离的化趋势满足第二条件时,确定所述目标车辆的前车将进行调头。由于车辆在左转或调头时,标注车辆图像中的车辆到的长方体上用于表征所述前车的背面上的顶点之间的像素距离、左侧面上的顶点之间的像素距离、右侧面上的顶点之间的像素距离会有特定的变化趋势,因此本公开实施例提供的车辆行为识别方法可以利用左转和调头时标注前车图像中的前车到的长方体的顶点间的像素距离的变化趋势准确识别前车将进行左转还是将进行调头,从而提升车辆的安全性。
- 还没有人留言评论。精彩留言会获得点赞!