一种交互式地基空间目标监视传感器模拟仿真系统的制作方法
1.本发明涉及传感器仿真领域,更具体涉及一种交互式地基空间目标监 视传感器模拟仿真系统。
背景技术:
2.空间目标监视系统的任务是对空间目标进行探测和精密跟踪,完成空 间目标定轨编目,预报空间事件,确定可能对航天系统构成威胁的航天器 的任务,尺寸、形状和轨道参数等重要目标特性。空间目标主要指卫星, 包括工作卫星和失效卫星,及各种空间碎片,如进入空间轨道的废弃航天 器、运载火箭残骸和碰撞碎片等。
3.地基空间目标监视装备(以下简称传感器)具有全天候工作、广域捕 获能力强等优点,可跟踪和预报空间之间物体的轨道,对可能发生的碰撞、 陨落等空间事件进行预警。
4.在调试传感器过程中,经常需要通过探测卫星的方式来验证传感器后 端软件系统探测跟踪目标和处理探测数据的能力。但传感器探测威力有限, 并不是随时都有目标或空间事件正好在传感器的探测威力范围内,且受硬 件条件和成本问题的影响,传感器亦难以时刻处于开发射状态。为了方便 传感器后端软件系统的调试,需要空间目标运动轨迹数据的支撑。第十一 届全国博士生学术年会——信息技术与安全专题论文集中北京理工大学丁 帅,付佗,高梅国于2013年10月18日发表的文献《空间目标监视系统及 其信息处理技术研究》从系统探测模型、关键处理算法及性能评估等方面, 论述了空间目标监视系统主要的信息处理技术,并探讨了影响该系统信息 处理能力的主要因素及相关改进策略。但是该文献没有对如何模拟空间目 标轨迹和空间事件进行研究,从而不能基于空间目标运动轨迹数据对传感 器后端软件系统进行调试。
技术实现要素:
5.本发明所要解决的技术问题在于现有技术缺乏模拟空间目标轨迹和空 间事件的相关研究,从而不能基于空间目标运动轨迹数据对传感器后端软 件系统进行调试,无法验证传感器后端软件系统探测跟踪目标和处理探测 数据的能力。
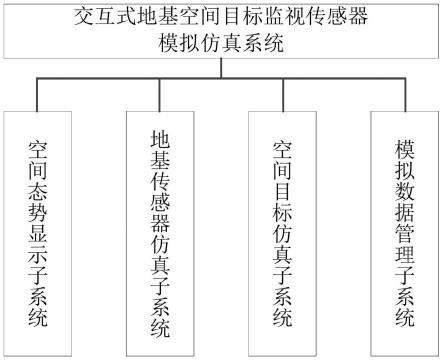
6.本发明通过以下技术手段实现解决上述技术问题的:一种交互式地基 空间目标监视传感器模拟仿真系统,包括地基传感器仿真子系统、空间目 标仿真子系统、空间态势显示子系统、模拟数据管理子系统,所述地基传 感器仿真子系统用于设置传感器的参数信息,生成仿真的传感器工作状态 并产生仿真的探测数据;空间目标仿真子系统用于根据输入的星历文件解 算星历信息并预报轨道,还用于依据输入的星历预报陨落、碰撞事件;空 间态势显示子系统用于对空间环境参数进行设置并对空间态势场景进行实 时动态显示;模拟数据管理子系统用于仿真场景、仿真探测数据及仿真参 数的管理。
7.本发明设置地基传感器的参数信息,生成仿真的传感器工作状态并产 生仿真的探测数据,根据输入的星历文件解算星历信息并预报轨道,完成 空间目标轨迹的仿真模拟,并且依据输入的星历预报陨落、碰撞事件,完 成空间事件的仿真模拟,从而当卫星或空
间事件不在传感器的探测威力范 围内或者传感器不在开发射状态时,仍然能够基于仿真模拟的空间目标运 动轨迹数据对传感器后端软件系统进行调试,验证传感器后端软件系统探 测跟踪目标和处理探测数据的能力。
8.进一步地,所述地基传感器仿真子系统包括传感器设置模块、传感器 工作状态仿真模块、探测数据生成模块,所述传感器设置模块用于设置传 感器的参数信息,包括:编号、名称、国别、传感器类型、位置坐标、观 测范围、数据率、观测时间范围、波束颜色;所述传感器工作状态仿真模 块用于生成仿真的传感器工作状态,如波束搜索、捕获、跟踪等状态;所 述探测数据生成模块依据传感器的探测范围、精度和数据率产生仿真的探 测数据,探测数据内容有雷达探测数据和光学装备探测数据,雷达探测数 据包括距离、方位角、俯仰角,光学装备探测数据包括赤经、赤纬。
9.更进一步地,所述距离、方位角、俯仰角的生成方法,包括:
10.1)设置好传感器的位置坐标,威力范围和探测精度,威力范围包括距 离范围、方位范围、角度范围,探测精度包括距离精度、方位精度、角度 精度;
11.2)按1分钟一点预报空间目标的轨道,并计算轨道上各点的经度、纬 度和高度;1分钟一点表示以1分钟为时间间隔;
12.3)根据目标的经度、纬度和高度,当目标进入地球北半球中国一侧, 即判定目标有可能被传感器捕获,判定目标可能进入传感器的观测范围内;
13.4)对于可能进入观测范围内的点,采用lagrange九阶插值法按传感器 的数据率计算对应时刻的坐标,再计算其到传感器的距离、方位角、俯仰 角,落入传感器威力范围的即为可被观测到的点;
14.5)按照传感器的探测精度对以上点的距离、方位角、俯仰角加白噪声。
15.更进一步地,所述赤经、赤纬的计算方法主要应用于地基光学设备跟 踪同步卫星,无需计算可见性,只需按照用户设定的观测时间计算赤经赤 纬,并按照传感器的精度给赤经赤纬加上白噪声即可。赤经赤纬计算方法 如下:
16.设观测矢量为r
obs
,α和δ表示赤经和赤纬观测量,那么观测矢量和α、 δ之间的关系为:
[0017][0018]
故赤经-赤纬观测量的测量方程表示为:
[0019][0020]
其中,x
obs
,y
obs
,z
obs
表示r
obs
的各分量,
[0021]
进一步地,所述空间目标仿真子系统包括星历设置模块、空间目标轨 道预报模块、空间事件计算模块,所述星历设置模块用于多种星历文件输 入,星历类型包括:tle星历、j2000.0坐标星历、ecef坐标星历,星历信 息包括:编号、名称、国别、历元、时间标记、预报圈数,且支持多选; 所述空间目标轨道预报模块用于解算星历信息,对于tle星历采用sgp4预 报方法预报,对于j2000.0坐标星历和ecef坐标星历则采用空间目标动力 学模型
预报;所述空间事件计算模块用于依据输入的星历预报陨落、碰撞 事件。
[0022]
更进一步地,所述sgp4预报方法,包括:
[0023]
1)sgp4预报软件读入tle星历并解算;
[0024]
2)采用sgp4模型预报tle星历;
[0025]
sgp4模型是采用lane和cranford广义分析理论导出的简化模型,考 虑了地球扁率、日月引力的长期和周期摄动影响以及大气主力模型参数的 引力共振和轨道衰退。其中引力模型采用brouwer解决方案,而大气模型 采用功率密度函数。
[0026]
sgp4模型由如下函数表述:
[0027]
yi=fi(e,i,ω,ω,f,n,b
*
),i=1,...7
[0028]
式中:e轨道偏心率,i轨道倾角,ω升交点赤经,ω近地点幅角,f真 近点角,n是平均轨道元的平均运动速度,b
*
是sgp4模型中使用的弹道系 数。
[0029]
更进一步地,预报陨落事件的过程包括:
[0030]
1)预报空间目标1个月以上的空间轨迹;
[0031]
2)计算目标高度变化,当目标高度不断降低,并最终小于120km时即 判定目标将会陨落。
[0032]
更进一步地,预报碰撞事件的过程包括:
[0033]
1)读入tle星历;
[0034]
2)计算tle星历中各目标的半长轴、半短轴、倾角;
[0035]
3)碰撞事件仅考察重要目标被碰撞的可能性。将重要目标设为主目标, 其他目标为辅目标。采用穷举法依次预报tle星历中的辅目标与主目标在未 来24小时内的间距,筛选碰撞事件:
[0036]
a)假设主目标的半长轴为a1,半短轴为b1,辅目标半长轴为a2,半短 轴为b2,若a1≤b2或b1≥a2,则两目标不可能发生碰撞;
[0037]
b)每隔5分钟预报两个目标的位置并计算间距,预报时长24小时, 其中,当两目标间距小于2000km,则按时间间隔30s预报目标位置并计算 间距;统计间距最小值r
min
,若r
min
≤300km,则判定二者有碰撞风险。
[0038]
c)进一步对有碰撞风险的目标进行筛选。按1s步长预报目标位置。当 辅目标进入以主目标为中心,半径25km范围内,即发出碰撞预警。
[0039]
进一步地,所述空间态势显示子系统包括空间环境参数设置模块、可 视化模块,所述空间环境参数设置模块用于地球重力场参数设置、大气环 境模型选择、三体力选择、潮汐力参数设置;所述可视化模块利用二维和 三维模型真实动态显示技术,根据观察点和观察方向对空间态势场景进行 实时动态显示。
[0040]
进一步地,所述模拟数据管理子系统包括数据库管理模块、数据输出 模块,所述数据库管理模块用于通过数据库管理仿真场景数据、仿真结果 数据、仿真参数;数据输出模块用于按模板输出仿真结果和中间过程文件, 模板也可由用户创建。
[0041]
本发明的优点在于:本发明设置地基传感器的参数信息,生成仿真的 传感器工作状态并产生仿真的探测数据,根据输入的星历文件解算星历信 息并预报星历,完成空间目标轨迹的仿真模拟,并且依据输入的星历预报 陨落、碰撞事件,完成空间事件的仿真模拟,从而当卫星或空间事件不在 传感器的探测威力范围内或者传感器不在开发射状态时,仍
然能够基于仿 真模拟的空间目标运动轨迹数据对传感器后端软件系统进行调试,验证地 基传感器后端软件系统探测跟踪目标和处理探测数据的能力。
附图说明
[0042]
图1为本发明实施例所提供的一种交互式地基空间目标监视传感器模 拟仿真系统的结构框图;
[0043]
图2为本发明实施例所提供的一种交互式地基空间目标监视传感器模 拟仿真系统的工作流程图;
[0044]
图3为本发明实施例所提供的一种交互式地基空间目标监视传感器模 拟仿真系统中星历选择模块的显示界面图;
[0045]
图4为本发明实施例所提供的一种交互式地基空间目标监视传感器模 拟仿真系统中空间目标tle星历预报的流程图;
[0046]
图5为本发明实施例所提供的一种交互式地基空间目标监视传感器模 拟仿真系统中传感器设置模块的显示界面图;
[0047]
图6为本发明实施例所提供的一种交互式地基空间目标监视传感器模 拟仿真系统中空间事件计算模块的显示界面图;
[0048]
图7为本发明实施例所提供的一种交互式地基空间目标监视传感器模 拟仿真系统中一部传感器的仿真探测数据存入数据库界面图。
[0049][0050]
具体实施方式
[0051]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本 发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然, 所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发 明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得 的所有其他实施例,都属于本发明保护的范围。
[0052]
如图1所示,一种交互式地基空间目标监视传感器模拟仿真系统,包 括地基传感器仿真子系统、空间目标仿真子系统、空间态势显示子系统、 模拟数据管理子系统,所述地基传感器仿真子系统用于设置传感器的参数 信息,生成仿真的传感器工作状态并产生仿真的探测数据;空间目标仿真 子系统用于根据输入的星历文件解算星历信息并预报星历,还用于依据输 入的星历预报陨落、碰撞事件;空间态势显示子系统用于对空间环境参数 进行设置并对空间态势场景进行实时动态显示;模拟数据管理子系统用于 仿真场景、仿真探测数据及仿真参数的管理。
[0053]
所述地基传感器仿真子系统包括传感器设置模块、传感器工作状态仿 真模块、探测数据生成模块,所述传感器设置模块用于设置传感器的参数 信息,包括:编号、名称、国别、传感器类型、位置坐标、观测范围、数 据率、观测时间范围、波束颜色;所述传感器工作状态仿真模块用于生成 仿真的传感器工作状态,如波束搜索、捕获、跟踪等状态;所述探测数据 生成模块依据传感器的探测范围、精度和数据率产生仿真的探测数据,探 测数据内容有雷达探测数据和光学装备探测数据,雷达探测数据包括距离、 方位角、俯仰角,光学装
备探测数据包括赤经、赤纬。
[0054]
所述距离、方位角、俯仰角的生成方法,包括:
[0055]
1)设置好探测装备(也即上文提到的传感器)的位置坐标,威力范围 (包括距离范围、方位范围、角度范围)和探测精度(包括距离精度、方 位精度、角度精度);
[0056]
2)按1分钟一点预报空间目标的轨道,并计算轨道上各点的经度、纬 度和高度;1分钟一点表示以1分钟为时间间隔;
[0057]
3)根据目标的经度、纬度和高度,当目标进入地球北半球中国一侧, 即判定目标有可能被探测装备捕获;
[0058]
4)对于可能进入观测范围内的点,采用lagrange九阶插值法按探测装 备的数据率计算对应时刻的坐标,再计算其到探测装备的距离、方位角、 俯仰角,落入传感器威力范围的即为可被观测到的点;
[0059]
5)按照装备的探测精度对以上点的距离、方位角、俯仰角加白噪声。
[0060]
所述赤经、赤纬的计算方法主要应用于地基光学设备跟踪同步卫星, 无需计算可见性,只需按照用户设定的观测时间计算赤经赤纬,并按照传 感器的精度给赤经赤纬加上白噪声即可。赤经赤纬计算方法如下:
[0061]
设观测矢量为r
obs
,α和δ表示赤经和赤纬观测量,那么观测矢量和α、 δ之间的关系为:
[0062][0063]
故赤经-赤纬观测量的测量方程表示为:
[0064][0065]
其中,x
obs
,y
obs
,z
obs
表示r
obs
的各分量,
[0066]
所述空间目标仿真子系统包括星历设置模块、空间目标轨道预报模块、 空间事件计算模块,所述星历设置模块用于多种星历文件输入,星历类型 包括:tle星历、j2000.0坐标星历、ecef坐标星历,星历信息包括:编号、 名称、国别、历元、时间标记、预报圈数,且支持多选;所述空间目标轨 道预报模块用于解算星历信息,对于tle星历采用sgp4预报方法预报,对 于j2000.0坐标星历和ecef坐标星历则采用空间目标动力学模型预报;所 述空间事件计算模块用于依据输入的星历预报陨落、碰撞事件。
[0067]
所述sgp4预报方法,包括:
[0068]
1)sgp4预报软件读入tle星历并解算;
[0069]
2)采用sgp4模型预报tle星历;
[0070]
sgp4模型是采用lane和cranford广义分析理论导出的简化模型,考 虑了地球扁率、日月引力的长期和周期摄动影响以及大气主力模型参数的 引力共振和轨道衰退。其中引力模型采用brouwer解决方案,而大气模型 采用功率密度函数。
[0071]
sgp4模型由如下函数表述:
[0072]
yi=fi(e,i,ω,ω,f,n,b
*
),i=1,...7
[0073]
式中:e轨道偏心率,i轨道倾角,ω升交点赤经,ω近地点幅角,f真 近点角,n是平均轨道元的平均运动速度,b
*
是sgp4模型中使用的弹道系 数。
[0074]
空间目标动力学模型的具体内容如下:
[0075]
空间目标绕地运行会受到各种摄动力的影响,这些摄动力归为两类: 保守力和非保守力。保守力包括:地球中心引力、地球非球形引力、日月 等三体引力、地球固体潮和海潮、广义相对论摄动等,它们的大小只与空 间目标的位置有关,与目标的速度及表面特征无关,因此,可以使用“位 函数”的形式进行描述。非保守力包括大气阻力、太阳光压和地球辐射压 等,非保守力不仅与目标的位置相关,还与其速度、几何形状以及表面特 性存在密切关系,不能使用“位函数”来表达,只能使用力模型的微分形 式来表示。
[0076]
1)地球引力
[0077]
根据理论力学可知,若将地球视为一个密度均匀分布的正球体,则它 对空间目标的吸引可以等效于一个质点,则地球与目标构成一个二体系统。 根据牛顿第二定律,目标运动方程为:
[0078][0079]
其中,μ=gm为地球引力常数,根据第16届国际大地测量协会和国际 天文联合会推荐,μ=3.986005
×
10
14
m3/s2。
[0080]
2)非球形引力
[0081]
在地固坐标系中,地球的形状摄动位函数可以展开成球谐函数的形式:
[0082][0083]
其中,
[0084]
为归一化的地球引力场系数;
[0085]
为归一化的缔结legendre函数;
[0086]
分别为卫星到地心的径向距离、纬度和经度;
[0087]
gme,ae分别为地球的引力常数和平均赤道半径。
[0088]
3)日月等行星引力
[0089]
除地球引力外,空间目标还受到太阳、月球及其他天体引力的影响。 太阳、月球和行星的引力摄动可以近似用质点来描述。根据牛顿万有引力 定律,点质量m引起的空间目标加速度为:
[0090][0091]
式中,gm表示星体的引力常数;和分别为空间目标和m的地心位 置矢量。
[0092]
4)地球潮汐
[0093]
日月引力会对地球本体产生作用,使地球产生一个随时间变化的形变。 固体地球的小规模周期性形变称为固体地球潮。海洋对日月潮汐摄动的响 应方式不同,称为海潮。所有这些形变,除几何上引起地面测站坐标变化 外,还会引起地球引力位球谐系数c
lm
和s
lm
的变化,从而导致相应引力位的 变化。
[0094]
5)相对论效应
[0095]
近地空间目标的运动应严格与广义相对论框架保持一致。通过引入新 的引力理论对牛顿引力理论框架进行修正,即所谓的后牛顿 (post-newtonian)效应改正,以更高精度地描述空间目标的运行。后牛顿 效应改正的摄动方程为:
[0096][0097]
式中,分别表示空间目标单位位置向量和单位速度向量;c为光速; gm为地心引力常数。
[0098]
6)大气阻力
[0099]
大气阻力是作用在低轨空间目标上的最大非引力摄动。低轨区域作为 空间碎片最为集中区域,在计算低轨目标的轨道摄动时,必须对大气阻力 进行精确描述。
[0100]
大气阻力摄动引起的空间目标加速度为:
[0101][0102]
式中,ρ为大气密度;cd为大气阻力系数,用来描述大气与空间目标 表面材料的相互作用,一般取值为1.5~3.0;a为空间目标垂直于vr方向的 横截面积;m为空间目标的质量;vr为空间目标相对于大气的运行速度;为vr方向的单位向量。
[0103]
7)太阳光压
[0104]
暴露在太阳辐射下的空间目标会受到太阳光子吸收或反射所产生的微 小力的作用,称为太阳光(辐射)压。太阳光压产生的加速度,与太阳光 强度、空间目标受到的照射面积、照射面与太阳光线的几何关系以及照射 面的发射和吸收特性等有关。太阳光压摄动引起的空间目标加速度为:
[0105][0106]
式中,γ为地影模型因子,常采用锥型地影模型;cr为太阳光压系数, 一般等于反射率ε与常数1之和,即cr=1+ε,ε的典型取值为0.2~0.9;p
sun
为太阳的辉光度,约为4.56
×
10-6
n/m2;a/m为空间目标的面质比;分别 为空间目标和太阳的地心向量。
[0107]
8)地球辐射压
[0108]
地球受太阳照射,除自身吸收一部分能量外,地面或海洋还将反射一 部分太阳能量返回太空;同时,因地球自身的热辐射,也会对近地空间目 标产生一个微小的压力,这些压力统称为地球辐射压。地球辐射压摄动对 空间目标引起的加速度随着高度升高而减小。低轨目标典型的地球辐射压 引起的加速度量级占太阳光压的10%~35%。
[0109]
9)经验力模型
[0110]
尽管空间目标轨道确定与预报计算涉及到的力模型精度已足够完善, 但要进一步改进模型精度却越来越困难,主要受制于模型的复杂程度和计 算量,尤其是非保守力模型并不完美。
[0111]
在高精度摄动力模型基础上,通过在空间目标轨道运动方程中引入一 些经验力
模型,来描述未模型化的小摄动力。模型误差大多发生在每圈一 次的频率上,相应地,采用常数项和每圈一次的经验加速度来构建经验力 模型,具体表示为:
[0112][0113]
式中,a、ac和as为待估参数;λ
t
为真近点角。经验加速度的方向 一般在星基坐标系中定义,分别指向沿迹、法向和径向三个方向。实际轨 道计算过程中,需要通过转换矩阵将星基坐标系转换到惯性坐标系。
[0114]
预报陨落事件的过程包括:
[0115]
1)预报空间目标1个月以上的空间轨迹;
[0116]
2)计算目标高度变化,当目标高度不断降低,并最终小于120km时即 判定目标将会陨落。
[0117]
预报碰撞事件的过程包括:
[0118]
1)读入tle星历;
[0119]
2)计算tle星历中各目标的半长轴、半短轴、倾角;
[0120]
3)碰撞事件仅考察重要目标被碰撞的可能性。将重要目标设为主目标, 其他目标为辅目标。采用穷举法依次预报tle星历中的辅目标与主目标在未 来24小时内的间距,筛选碰撞事件:
[0121]
a)假设主目标的半长轴为a1,半短轴为b1,辅目标半长轴为a2,半短 轴为b2,若a1≤b2或b1≥a2,则两目标不可能发生碰撞;
[0122]
b)每隔5分钟预报两个目标的位置并计算间距,预报时长24小时, 其中,当两目标间距小于2000km,则按时间间隔30s预报目标位置并计算 间距;统计间距最小值r
min
,若r
min
≤300km,则判定二者有碰撞风险;
[0123]
c)进一步对有碰撞风险的目标进行筛选。按1s步长预报目标位置。当 辅目标进入以主目标为中心,半径25km范围内,即发出碰撞预警。
[0124]
所述空间态势显示子系统包括空间环境参数设置模块、可视化模块, 所述空间环境参数设置模块用于地球重力场参数设置、大气环境模型选择、 三体力选择、潮汐力参数设置;所述可视化模块利用二维和三维模型真实 动态显示技术,根据观察点和观察方向对空间态势场景进行实时动态显示。
[0125]
所述模拟数据管理子系统包括数据库管理模块、数据输出模块,所述 数据库管理模块用于通过数据库管理仿真场景数据、仿真结果数据、仿真 参数;数据输出模块用于按模板输出仿真结果和中间过程文件,模板也可 由用户创建。
[0126]
如图2所示,本发明的工作过程为:
[0127]
1)用户首先通过初始参数文件配置空间环境参数,构建空间环境;
[0128]
2)用户基于星历设置模块提供的人机界面,如图3所示,选择需要模 拟的空间目标,并输入仿真控制参数,包括:仿真起始时间、仿真 结束时间、仿真步长,星历类型。星历选择模块将用户选择的星历 信息和输入的仿真控制信息传给空间目标仿真子系统。
[0129]
3)用户基于传感器设置模块提供的人机界面,如图5所示,选择需要 模拟的传感器,并输入仿真参数,包括:经纬度、探测范围、杂波、 干扰等传给空间目标仿真子系统。
[0130]
4)空间目标轨道预报模块根据输入的星历信息和仿真控制信息,生成 空间目标
运动轨迹,流程如图4所示。生成的空间目标运动轨迹由 一串点组成,每个点的信息包括:
[0131]
a)时间;
[0132]
b)地心地球固联坐标系(ecef)下的位置坐标x、y、z值;
[0133]
c)ecef坐标系下的速度分离v
x
,vy,vz值;
[0134]
生成的空间目标运动轨迹传给可视化模块。
[0135]
5)根据步骤4)中的目标运动轨迹,计算各点高度,当高度持续下降 且最终≤120km时,判定目标陨落,如图6所示,判定结果显示在 界面上;
[0136]
6)按照步骤4)方法预报24小时内主辅目标的目标运动轨迹,并计算 各时刻目标间距,当距离≤300km时,判定目标有碰撞风险,进一 步按1s步长预报目标位置并计算目标间距,当辅目标进入以主目 标为中心的半径25km以内即发出碰撞预警,如图6所示,判定结 果显示在界面上;
[0137]
7)根据传感器探测范围依次计算各空间目标的可观测弧段,在动态推 演时依次给各观测点的距离、方位、俯仰加上高斯白噪声;(按照 传感器仿真子系统生成可观测弧段的方法进行,也即按照探测数据 生成模块产生仿真的探测数据的过程中得出可观测点以后将观测 点连线生成可观测弧段)。由于传感器在跟踪目标时由于各种原因, 测量值会存在一定误差。按照传感器的精度(包括距离精度、方位 角精度、俯仰角精度)产生正态分布的噪声,对应加到距离、方位、 俯仰上。
[0138]
8)可视化模块根据传入的空间目标运动轨迹,展示在三维场景显示和 二维星下点两种显示模式下的模拟场景,并提供推演功能,支持按 照时间节拍,动态显示空间目标的实时位置。
[0139]
9)用户按需求将仿真数据上传数据库,数据库表如图7所示。
[0140]
通过以上技术方案,本发明提供一种交互式地基空间目标监视传感器 模拟仿真系统,支持基于星历选择需要模拟的空间目标,可以生成空间目 标运动轨迹,用户可以设置多部传感器。该系统所有的参数设置均可通过 人机界面输入,用户使用门槛低。该系统为整个模拟场景设计了三维场景 显示和二维星下点显示两种展示模式,并支持动态推演,为用户全方位观 察生成的空间目标运动轨迹、空间事件过程提供了友好直观的界面支持。
[0141]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照 前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解: 其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分 技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本 质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1