路面生成方法、装置、存储介质、设备及车辆与流程
本技术涉及计算机,具体而言,涉及一种路面生成方法、装置、存储介质、设备及车辆。
背景技术:
1、电子地图是利用计算机技术,以数字方式存储和查阅的地图。人们在步行、骑行或者驾驶时,均可以通过查阅电子地图来获取去往目的地的路线,并且还可以通过开启智能导航功能实时导航。为了提高用户体验以及提高电子地图查询的准确度,已逐渐从二维电子地图发展为三维电子地图。
2、生成三维电子地图最关键的环节之一就是生成三维路面。相关技术中,主要依靠激光雷达采集路网三维点,并从路网三维点中提取路面三维点,基于路面三维点生成三维路面。然而,基于激光雷达生成三维路面的成本较高。
技术实现思路
1、本技术提供了一种路面生成方法、装置、存储介质、设备及车辆,能够解决基于激光雷达生成三维路面成本较高的问题。
2、具体的技术方案如下:
3、第一方面,本技术实施例提供了一种路面生成方法,所述方法包括:
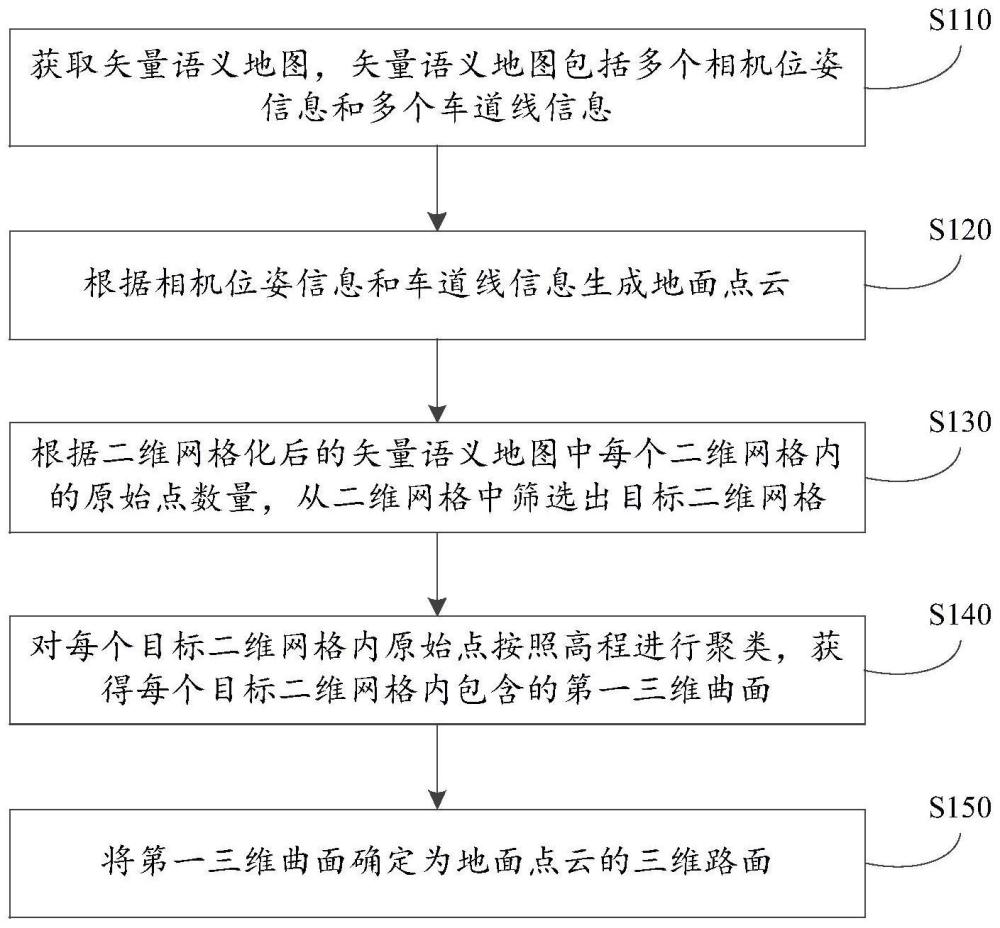
4、获取矢量语义地图,所述矢量语义地图包括多个相机位姿信息和多个车道线信息,每个所述相机位姿信息表示对应视频帧被采集时相机的位姿,所述相机为采集车上安装的相机;
5、根据所述相机位姿信息和所述多个车道线信息生成地面点云;
6、根据二维网格化后的所述矢量语义地图中每个二维网格内的原始点数量,从所述二维网格中筛选出目标二维网格,其中,所述地面点云中每个三维点为原始点;
7、对每个所述目标二维网格内所述原始点按照高程进行聚类,获得每个所述目标二维网格内包含的第一三维曲面;
8、将所述第一三维曲面确定为所述地面点云的三维路面。
9、通过上述方案可知,本技术实施例可以根据采集车相机生成的包括相机位姿信息和车道线信息的矢量语义地图生成地面点云,并通过先对地面点云进行水平拟合(即二维网格化),再进行竖向拟合(即高程聚类),生成三维路面,该实现方法是基于纯视觉的路面生成方法,无需依赖昂贵的激光雷达,从而可以降低成本。
10、在第一方面的第一种可能的实现方式中,在所述将所述第一三维曲面确定为所述地面点云的三维路面之前,所述方法还包括:
11、针对每个待拟合第一三维曲面,根据所述待拟合第一三维曲面内的所述原始点和与所述待拟合第一三维曲面连接的至少一个其他第一三维曲面内的所述原始点,对所述待拟合第一三维曲面进行二次曲面拟合,获得所述待拟合第一三维曲面对应的第二三维曲面,其中,所述待拟合第一三维曲面为待进行二次曲面拟合的所述第一三维曲面,各个所述第一三维曲面的连接关系根据所述高程以及各个所述第一三维曲面对应的所述目标二维网格之间的连接关系确定;
12、所述将所述第一三维曲面确定为所述地面点云的三维路面,包括:
13、将所述第一三维曲面对应的所述第二三维曲面确定为所述三维路面。
14、通过上述方案可知,本技术实施例通过结合与待拟合第一三维曲面连接的至少一个其他第一三维曲面内的原始点,对待拟合第一三维曲面进行二次拟合,可以进一步提高待拟合第一三维曲面与周围其他第一三维曲面之间衔接的光滑度,从而提高了三维路面的拟合质量。
15、在第一方面的第二种可能的实现方式中,在所述将所述第一三维曲面对应的所述第二三维曲面确定为所述三维路面之前,所述方法还包括:
16、丢弃距离均值大于或者等于预设平均距离阈值的所述第二三维曲面,其中,所述距离均值为所述待拟合第一三维曲面内的所述原始点和与所述待拟合第一三维曲面连接的至少一个其他第一三维曲面内的所述原始点,分别到所述待拟合第一三维曲面对应的所述第二三维曲面的垂直距离的平均值。
17、在第一方面的第三种可能的实现方式中,在所述将所述第一三维曲面对应的所述第二三维曲面确定为所述三维路面之后,所述方法还包括:
18、当同一个目标二维网格内存在至少两个所述第二三维曲面时,针对所述至少两个所述第二三维曲面中相邻两个所述第二三维曲面,若所述相邻两个所述第二三维曲面的平均高程之差小于或者等于第一预设高程差阈值,则将所述相邻两个所述第二三维曲面中所述原始点数量最小的所述第二三维曲面删除,并将与被删除的所述第二三维曲面连接的所述第二三维曲面删除,其中,各个所述第二三维曲面的连接关系根据所述高程以及各个所述第二三维曲面对应的所述目标二维网格之间的连接关系确定。
19、通过上述方案可知,本技术实施例可以当同一个目标二维网格内相邻两个第二三维曲面的平均高程之差小于或者等于第一预设高程差阈值时,将相邻两个第二三维曲面中原始点数量最小的第二三维曲面及其连接的第二三维曲面删除,从而可以删除不合实际的、冗余的第二三维曲面,进而可以避免出现路面飘飞现象。
20、在第一方面的第四种可能的实现方式中,各个所述第一三维曲面的连接关系和/或各个所述第二三维曲面的连接关系的确定方法包括:
21、针对每个待处理目标三维曲面,确定与所述待处理目标三维曲面对应的所述目标二维网格连接的其他目标二维网格;
22、将每个所述其他目标二维网格内包含的目标三维曲面中与所述待处理目标三维曲面的平均高程之差最小且所述平均高程之差小于或者等于第二预设高程差阈值的目标三维曲面,确定为与所述待处理目标三维曲面具有连接关系的所述目标三维曲面;
23、其中,所述目标三维曲面包括所述第一三维曲面或者所述第二三维曲面。
24、在第一方面的第五种可能的实现方式中,所述根据二维网格化后的所述矢量语义地图中每个二维网格内的原始点数量,从所述二维网格中筛选出目标二维网格,包括:
25、针对所述二维网格化后的所述矢量语义地图中每个待判断的二维网格,在所述待判断的二维网格内所述原始点数量大于或者等于预设数量阈值的情况下,确定所述待判断的二维网格为所述目标二维网格,在所述待判断的二维网格内所述原始点数量小于所述预设数量阈值的情况下,确定所述待判断的二维网格不是所述目标二维网格。
26、在第一方面的第六种可能的实现方式中,所述根据所述相机位姿信息和所述车道线信息生成地面点云,包括:
27、将所述相机位姿信息对应的对地参数向量与所述地面的交点确定为所述垂点;
28、按照预设采样频率对所述车道线信息进行采样,获得多个采样点;
29、将所述矢量语义地图中包含的所述垂点和所述采样点确定为所述地面点云。
30、第二方面,本技术实施例提供了一种路面生成装置,所述装置包括:
31、获取单元,用于获取矢量语义地图,所述矢量语义地图包括多个相机位姿信息和多个车道线信息,每个所述相机位姿信息表示对应视频帧被采集时相机的位姿,所述相机为采集车上安装的相机;
32、生成单元,用于根据所述相机位姿信息和所述车道线信息生成地面点云;
33、筛选单元,用于根据二维网格化后的所述矢量语义地图中每个二维网格内的原始点数量,从所述二维网格中筛选出目标二维网格,其中,所述地面点云中每个三维点为原始点;
34、聚类单元,用于对每个所述目标二维网格内所述原始点按照高程进行聚类,获得每个所述目标二维网格内包含的第一三维曲面;
35、路面确定单元,用于将所述第一三维曲面确定为所述地面点云的三维路面。
36、通过上述方案可知,本技术实施例可以根据采集车相机生成的包括相机位姿信息和车道线信息的矢量语义地图生成地面点云,并通过先对地面点云进行水平拟合(即二维网格化),再进行竖向拟合(即高程聚类),生成三维路面,该实现方法是基于纯视觉的路面生成方法,无需依赖昂贵的激光雷达,从而可以降低成本。
37、在第二方面的第一种可能的实现方式中,所述装置还包括:
38、拟合单元,用于在所述将所述第一三维曲面确定为所述地面点云的三维路面之前,针对每个待拟合第一三维曲面,根据所述待拟合第一三维曲面内的所述原始点和与所述待拟合第一三维曲面连接的至少一个其他第一三维曲面内的所述原始点,对所述待拟合第一三维曲面进行二次曲面拟合,获得所述待拟合第一三维曲面对应的第二三维曲面,其中,所述待拟合第一三维曲面为待进行二次曲面拟合的所述第一三维曲面,各个所述第一三维曲面的连接关系根据所述高程以及各个所述第一三维曲面对应的所述目标二维网格之间的连接关系确定;
39、所述路面确定单元,用于将所述第一三维曲面对应的所述第二三维曲面确定为所述三维路面。
40、在第二方面的第二种可能的实现方式中,所述装置还包括:
41、丢弃单元,用于在所述将所述第一三维曲面对应的所述第二三维曲面确定为所述三维路面之前,丢弃距离均值大于或者等于预设平均距离阈值的所述第二三维曲面,其中,所述距离均值为所述待拟合第一三维曲面内的所述原始点和与所述待拟合第一三维曲面连接的至少一个其他第一三维曲面内的所述原始点,分别到所述待拟合第一三维曲面对应的所述第二三维曲面的垂直距离的平均值。
42、在第二方面的第三种可能的实现方式中,所述装置还包括:
43、删除单元,用于在所述将所述第一三维曲面对应的所述第二三维曲面确定为所述三维路面之后,当同一个目标二维网格内存在至少两个所述第二三维曲面时,针对所述至少两个所述第二三维曲面中相邻两个所述第二三维曲面,若所述相邻两个所述第二三维曲面的平均高程之差小于或者等于第一预设高程差阈值,则将所述相邻两个所述第二三维曲面中所述原始点数量最小的所述第二三维曲面删除,并将与被删除的所述第二三维曲面连接的所述第二三维曲面删除,其中,各个所述第二三维曲面的连接关系根据所述高程以及各个所述第二三维曲面对应的所述目标二维网格之间的连接关系确定。
44、在第二方面的第四种可能的实现方式中,所述装置还包括:
45、连接关系确定单元,用于确定各个所述第一三维曲面的连接关系和/或各个所述第二三维曲面的连接关系;
46、所述连接关系确定单元,包括:
47、第一确定模块,用于针对每个待处理目标三维曲面,确定与所述待处理目标三维曲面对应的所述目标二维网格连接的其他目标二维网格;
48、第二确定模块,用于将每个所述其他目标二维网格内包含的目标三维曲面中与所述待处理目标三维曲面的平均高程之差最小且所述平均高程之差小于或者等于第二预设高程差阈值的目标三维曲面,确定为与所述待处理目标三维曲面具有连接关系的所述目标三维曲面;
49、其中,所述目标三维曲面包括所述第一三维曲面或者所述第二三维曲面。
50、在第二方面的第五种可能的实现方式中,所述筛选单元,用于针对所述二维网格化后的所述矢量语义地图中每个待判断的二维网格,在所述待判断的二维网格内所述原始点数量大于或者等于预设数量阈值的情况下,确定所述待判断的二维网格为所述目标二维网格,在所述待判断的二维网格内所述原始点数量小于所述预设数量阈值的情况下,确定所述待判断的二维网格不是所述目标二维网格。
51、在第二方面的第六种可能的实现方式中,所述生成单元,包括:
52、第三确定模块,用于将所述相机位姿信息对应的对地参数向量与所述地面的交点确定为所述垂点;
53、采样模块,用于按照预设采样频率对所述车道线信息进行采样,获得多个采样点;
54、第四确定模块,用于将所述矢量语义地图中包含的所述垂点和所述采样点确定为所述地面点云。
55、第三方面,本技术实施例提供一种存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如第一方面中任一可能的实现方式所述的方法。
56、第四方面,本技术实施例提供一种电子设备,所述电子设备包括:
57、一个或多个处理器;
58、存储装置,用于存储一个或多个程序,
59、当所述一个或多个程序被所述一个或多个处理器执行,使得所述电子设备实现如第一方面中任一可能的实现方式所述的方法。
60、第五方面,本技术实施例提供一种车辆,所述车辆包含如第二方面中任一可能的实现方式所述的装置,或者包含如第四方面所述的电子设备。
- 还没有人留言评论。精彩留言会获得点赞!