一种基于多源遥感数据的森林变化驱动力分类方法
1.本发明涉及遥感影像处理技术领域,具体为一种基于多源遥感数据的森林变化驱动力分类方法。
背景技术:
2.森林变化是指森林扰动和恢复这两个过程,又可称为森林的损失和增益。森林扰动包括毁林和损失,毁林是森林状态突然转变为无森林状态,森林损失是森林覆盖部分的损失,如森林退化、选择性采伐和人为森林管理活动。森林恢复是森林扰动的反向过程,在改善的水热条件或人工抚育条件下森林覆盖度增加的过程。森林变化驱动力是引起森林扰动和恢复的原因,例如砍伐、火灾、森林退化、自然恢复、人工恢复等。明确这些驱动力可以为森林管理政策的制定与调整,区域可持续发展提供重要的数据支撑。
3.现有森林变化驱动力的分类得方法有实地调查、人工结合遥感影像勾绘、监督分类方法等,其中:1)实地调查是森林变化驱动力信息获取最准确的方法之一,实地调查需要林业工作人员或调查人员携带定位仪器到达森林变化区域进行目视调查与记录,记录森林变化点的实地坐标和属性信息,包括是否为森林迹地、是否为森林、扰动和恢复驱动力、边界范围等。但实地调查需要较高人力和其他资源,且不能在森林变化快、高山高寒高海拔区域进行持续性测量与记录。
4.2)人工结合遥感影像勾绘是获得森林变化驱动力一种方法,此类方法需要有专业背景的调查人员结合及时和历史遥感影像进行森林变化区域驱动力的识别。例如:燃烧严重程度监测趋势(mtbs)项目使用陆地卫星数据绘制了美国和阿拉斯加从1984年到现在的年度火灾面积和严重程度的地图。美国空中探测调查(ads)项目绘制了由昆虫和疾病引起的森林破坏的地图。但这种方法只能识别小范围的森林变化驱动力,且变化驱动力类型单一。
5.3)监督分类方法是近年来监测森林变化驱动力的一种探索方法,相比人工结合遥感影勾绘方式是一种改进的半自动提取方法。这类方法结合算法模型和先验知识,实现变更驱动信息的提取,利用检测到的森林扰动斑块受到扰动时间前后的光谱、纹理和地形等属性,并结合其他辅助数据,利用随机森林、回归树等分类器进行驱动力分类。但这只方法对于数据预处理的要求极高,尤其是在构建扰动时间前后的光谱、纹理信息的提取,只能够对森林扰动驱动力进行分类,目前没有对森林恢复驱动力进行分分类。
技术实现要素:
6.本发明的目的在于提供一种基于多源遥感数据的森林变化驱动力分类方法,以解决上述背景技术中提出的目前的三种方法对于数据预处理的要求极高,尤其是在监督分类中构建扰动时间前后的光谱、纹理信息提取难,森林扰动驱动力分类类型单一,目前没有对森林恢复驱动力进行分分类的问题。
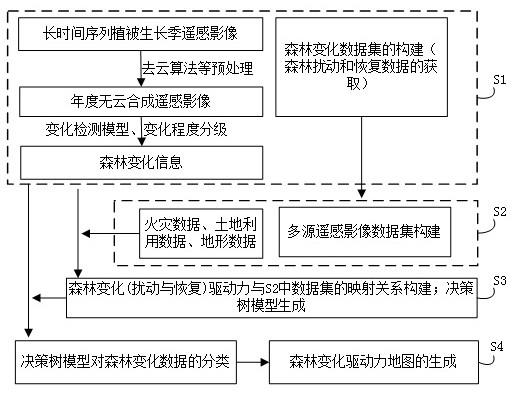
7.为实现上述目的,本发明提供如下技术方案:一种基于多源遥感数据的森林变化驱动力分类方法,该基于多源遥感数据的森林变化驱动力分类方法的具体步骤流程如下:s1、森林变化数据集的构建:s11、提取森林变化数据集的年度无云影像合成;s12、森林变化数据集提取;s13、森林变化、扰动和恢复程度数据level的生成;s2、多源遥感影像数据集构建;s3、决策树模型对森林变化数据的分类:s31、构建森林扰动驱动力与土地利用的关系映射;s32、确定森林恢复驱动力与土地利用、地形数据的空间关系;s33、根据s31和s32确定的映射关系和空间关系,构建决策树模型;s4、森林变化驱动力地图的生成:s41、森林变化数据集作为分类数据输入;s42、火灾驱动力识别;s43、识别其他干扰驱动力;s44、识别恢复驱动力;s45、森林变化、扰动驱动力地图生成。
8.优选的,所述s1中,森林变化数据需要满足以下几个特征:该森林变化数据需要为空间数据,并记录森林发生变化的年份、变化持续时间信息,该森林变化数据集的构建使用连续变化监测算法自主生产,所述步骤s11中,该年度无云影像合成使用landsat中长时间分辨率生长季的遥感影像,通过去云算法去除云、阴影、水、雪的影响,生成时间序列的年度无云遥感影像,并生成normalized burn ratio 、ndvi指数,对于影像合成时间,北半球和南半球、高纬度和低纬度均有差异,通过文献查询、modis植被指数数据分析得到,modis植被指数的分析使用可视化界面生成植被指数动画辅助完成;所述步骤s12中,该森林变化数据集提取使用变化监测算法对步骤s11中生成的数据进行分割,完成森林变化数据集的提取,变化监测算法包括但不限于landtrendr、植被变化追踪器、bfast、verdet 、ccdc、cold ,这些算法大多是基于遥感影像像素的时相-光谱分割算法,适用于中分辨率时间序列卫星影像的变化检测,森林变化数据集通过桌面端软件完成,或通过云计算平台完成;所述步骤s13中,森林变化、扰动和恢复程度数据level的生成会根据变化监测算法监测到步骤s11中指数的变化幅度,参考已发表文献或结合高分辨率影像目视判读,按照整个区域内的情况将森林扰动分为轻度、中度和重度,数据被标记为level,并将该数据加入森林变化数据集。
9.优选的,所述s2中,多源遥感影像数据集用于s3中的决策树模型分类,这里的多源遥感影像包括s1中生产的森林变化数据集,任意来源的土地利用数据集、火灾数据集或地形数据集四类数据,火灾数据集的时间需要与森林变化数据集保持一致,土地利用数据集时间为森林变化数据集的最后一年。
10.优选的,所述s3中,步骤s31会根据不同区域森林变化特征,参照区域特点划分森林变化驱动力,森林扰动驱动力与土地利用之间的映射关系:森林受到扰动后变为耕地,则驱动力为农业转移;森林受到扰动后依然为森林,则驱动力是商品林种植或者是受到自然灾害扰动,两者通过距离人为活动的范围来判定;森林受到扰动后土地利用类型变为草地、灌木、湿地,则考虑森林退化为森林变化的主要驱动力;森林受到扰动后土地利用类型变为人工地表,则考虑驱动力为人类活动包括建设活动和采矿;森林受到扰动后土地利用类型变为裸地,则考虑驱动力为砍伐;森林受到扰动后土地利用类型为积雪和冰川,则考虑驱动力为潜在的自然灾害;所述步骤s32中,森林恢复驱动力包括自然恢复和人工恢复,根据不同区域的特点确定如下两个参数:第一是人类活动影响森林的最远距离,设定距离耕地与人工地表的缓冲区,缓冲区内为人工恢复,缓冲区外为自然恢复;第二是植树造林的坡度限
制,根据区域特点确定区域内植树造林能到达的最大坡度为45
°
。
11.优选的,所述s4中,根据步骤s33生成的决策树模型,按照以下步骤获得森林变化驱动力地图;所述步骤s41中,输入森林变化数据,包括变化时间信息“年”、变化的时间长度“持续时间”和变化的程度“水平”3个波段,记录了森林变化的年份、持续时间和水平信息;所述步骤s42中,利用时间匹配方法,将输入的扰动数据与火灾数据在时间和空间上进行匹配,如果在时间和空间上都能实现匹配,则将这些区域记录为火灾引起的扰动;所述步骤s43中,森林退化、商品林种植、农业转移、人类活动和潜在的自然灾害干扰是通过s31建立的映射关系确定的;所述步骤s44中,自然恢复和人工恢复由s32生成的两个阈值来判断,一个是恢复区与人工地表和耕地的距离,另一个是恢复区的坡度数据;所述步骤s45中,根据步骤s42和步骤s43生成的数据合并生成,将步骤s44生成的数据生成森林变化恢复驱动力地图。
12.与现有技术相比,本发明的有益效果是:该基于多源遥感数据的森林变化驱动力分类方法优点在于(1)分类的森林变化驱动力类型多样,在之前的研究或工作中,森林变化驱动力分类由于采用数据源或方法单一,通常只能由专业人员通过高分辨影像勾绘森林变化驱动力,这种勾绘往往只能识别单一的森林变化驱动力,例如森林火灾或某种森林病虫害,本发明利用多源遥感数据结合决策树模型能够有效解决这些以往驱动力分类单一的问题;(2)构建的基于多源遥感影像和决策树模型可用于多个尺度上的森林变化驱动力信息提取,计算简单、计算效率高;(3)构建的优化和扩充样本能够在短时间内达到对研究区解译的最好精度,使影像解译结果能够快速、准确地应用于各行各业;(4)提取的森林变化驱动力分类结果很长的时间序列,森林变化受短期和长期变化,例如森林退化通常发生在几年或者十几年的时间序列上。以往提取方法没有很好地实现长时间序列的驱动力分类与提取。本发明提出的方法能够实现30年时间序列森林变化驱动力信息的提取;(5)本发明提出的方法不依赖于大量实地调查和高分辨影像勾绘,减少以往驱动力信息提取过程中繁重的工作量。
附图说明
13.图1为本发明技术路线图;图2为本发明中森林变化扰动数据集结果图;图3为本发明中森林变化恢复数据集结果图;图4为本发明中构造的决策树模型图;图5为本发明中森林变化扰动驱动力分类结果图;图6为本发明中森林变化恢复驱动力分类结果图。
具体实施方式
14.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
15.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
16.实施例一:请参阅图1-6,本发明提供一种技术方案:一种基于多源遥感数据的森林变化驱动力分类方法,该基于多源遥感数据的森林变化驱动力分类方法的具体步骤流程如下:s1、森林变化数据集的构建:s11、提取森林变化数据集的年度无云影像合成;s12、森林变化数据集提取;s13、森林变化、扰动和恢复程度数据level的生成;s2、多源遥感影像数据集构建;s3、决策树模型对森林变化数据的分类:s31、构建森林扰动驱动力与土地利用的关系映射;s32、确定森林恢复驱动力与土地利用、地形数据的空间关系;s33、根据s31和s32确定的映射关系和空间关系,构建决策树模型;s4、森林变化驱动力地图的生成:s41、森林变化数据集作为分类数据输入;s42、火灾驱动力识别;s43、识别其他干扰驱动力;s44、识别恢复驱动力;s45、森林变化、扰动驱动力地图生成。
17.所述s1中,森林变化数据需要满足以下几个特征:该森林变化数据需要为空间数据,并记录森林发生变化的年份、变化持续时间信息,该森林变化数据集的构建使用连续变化监测算法自主生产,所述步骤s11中,该年度无云影像合成使用landsat中长时间分辨率生长季的遥感影像,通过去云算法去除云、阴影、水、雪的影响,生成时间序列的年度无云遥感影像,并生成normalized burn ratio 、ndvi指数,对于影像合成时间,北半球和南半球、高纬度和低纬度均有差异,通过文献查询、modis植被指数数据分析得到,modis植被指数的分析使用可视化界面生成植被指数动画辅助完成;所述步骤s12中,该森林变化数据集提取使用变化监测算法对步骤s11中生成的数据进行分割,完成森林变化数据集的提取,变化监测算法包括但不限于landtrendr、植被变化追踪器、bfast、verdet 、ccdc、cold ,这些算法大多是基于遥感影像像素的时相-光谱分割算法,适用于中分辨率时间序列卫星影像的变化检测,森林变化数据集通过桌面端软件完成,或通过云计算平台完成;所述步骤s13中,森林变化、扰动和恢复程度数据level的生成会根据变化监测算法监测到步骤s11中指数的变化幅度,参考已发表文献或结合高分辨率影像目视判读,按照整个区域内的情况将森林扰动分为轻度、中度和重度,数据被标记为level,并将该数据加入森林变化数据集。
18.所述s2中,多源遥感影像数据集用于s3中的决策树模型分类,这里的多源遥感影像包括s1中生产的森林变化数据集,任意来源的土地利用数据集、火灾数据集或地形数据集四类数据,火灾数据集的时间需要与森林变化数据集保持一致,土地利用数据集时间为森林变化数据集的最后一年。
19.所述s3中,步骤s31会根据不同区域森林变化特征,参照区域特点划分森林变化驱动力,森林扰动驱动力与土地利用之间的映射关系:森林受到扰动后变为耕地,则驱动力为农业转移;森林受到扰动后依然为森林,则驱动力是商品林种植或者是受到自然灾害扰动,两者通过距离人为活动的范围来判定;森林受到扰动后土地利用类型变为草地、灌木、湿地,则考虑森林退化为森林变化的主要驱动力;森林受到扰动后土地利用类型变为人工地表,则考虑驱动力为人类活动包括建设活动和采矿;森林受到扰动后土地利用类型变为裸
地,则考虑驱动力为砍伐;森林受到扰动后土地利用类型为积雪和冰川,则考虑驱动力为潜在的自然灾害;所述步骤s32中,森林恢复驱动力包括自然恢复和人工恢复,根据不同区域的特点确定如下两个参数:第一是人类活动影响森林的最远距离,设定距离耕地与人工地表的缓冲区,缓冲区内为人工恢复,缓冲区外为自然恢复;第二是植树造林的坡度限制,根据区域特点确定区域内植树造林能到达的最大坡度为45
°
。
20.所述s4中,根据步骤s33生成的决策树模型,按照以下步骤获得森林变化驱动力地图;所述步骤s41中,输入森林变化数据,包括变化时间信息“年”、变化的时间长度“持续时间”和变化的程度“水平”3个波段,记录了森林变化的年份、持续时间和水平信息;所述步骤s42中,利用时间匹配方法,将输入的扰动数据与火灾数据在时间和空间上进行匹配,如果在时间和空间上都能实现匹配,则将这些区域记录为火灾引起的扰动;所述步骤s43中,森林退化、商品林种植、农业转移、人类活动和潜在的自然灾害干扰是通过s31建立的映射关系确定的;所述步骤s44中,自然恢复和人工恢复由s32生成的两个阈值来判断,一个是恢复区与人工地表和耕地的距离,另一个是恢复区的坡度数据;所述步骤s45中,根据步骤s42和步骤s43生成的数据合并生成,将步骤s44生成的数据生成森林变化恢复驱动力地图。
21.案例选择在67
°
e-85
°
e,30
°
n-39
°
n,案例选用了landsat长时间序列遥感影像和landtrendr时相-光谱分割算法,利用构建的决策树模型生成了森林变化驱动力的地图。构建森林变化验证数据集,验证了本方案的有效性,结果表明决策树能够实现大范围森林变化驱动力信息提取,减少投入的工作量。具体如下:(一)森林变化数据集的构建(森林扰动和恢复数据的获取)(1)用于提取森林变化数据集的年度无云影像合成使用的时间序列数据landsat来自于usgs,包括tm、etm和oli传感器。数据具有高分辨率、较短重访周期以及数据易于访问和处理的优点。本研究使用google earth engine(gee)作为主要数据处理平台,gee平台提供了landsat所有传感器的大气校正表面反射率数据接入。共使用landsat时间序列遥感影像8203幅,landsat 7 etm+ slc-off 数据在本研究中不被使用。使用oli到etm+的调和函数(harmonic function)进行数据的一致性处理,以减少两个传感器之间反射波长的差异。使用图像质量评估带qa和cfmask波段去除云、雪、水和阴影。对于影像合成时间的选择,需要根据区域的不同选择植被生长季的影像,本案例结合modis植被指数的分析可使用可视化界面(https://streamlit.geemap.org/)生成了ndvi植被指数动画,通过目视判读获得影像合成时间。本研究选择了1990-2020年7月15日至10月1日所有可用的植被生长季的遥感影像。通过中值合成的方式生成年度合成图像。
22.基于年度合成影像,本案例生成了表2中的指数结合(1)中的光谱波段用于森林变化数据集的提取。
[0023] 表1 本研究使用的指数
在年度无云遥感影像合成的过程中,遵循本发明实施方法s11中所述:
①
通过去云算法去除云、阴影、水、雪的影响;
②
影像合成时间通过相关可视化界面生成植被指数动画,通过目视解译方法确定影像合成时间。
[0024]
(2)森林变化数据集提取结合(1)中生成的年度无云合成影像,使用landtrendr算法实现森林变化数据集的提取。landtrendr是一种基于遥感影像像素的时相-光谱分割算法,适用于中分辨率时间序列卫星影像的变化检测。landtrendr算法使用基于回归和点对点拟合光谱指数作为时间函数的时间分割策略,允许捕获缓慢发展的过程,如恢复和意外事件。landtrendr时间分割算法被认为是一种有效检测森林扰动和恢复的方法,生成的光谱时间序列数据的轨迹几乎没有年际信号噪声。该算法通过从时间序列数据中提取地表反射率变化趋势,捕捉短期扰动和长期恢复趋势。本研究使用gee平台完成森林变化数据集的提取。图2和图3展示森林变化(扰动和恢复)数据集的提取结果。
[0025]
(3)森林变化(扰动和恢复)程度数据level的生成根据(2)中生成的森林变化数据集中的变化幅度数据(magnitude),结合高分辨率影像目视判读,按照整个区域内的情况将森林扰动分为轻度、中度和重度,将数据标记为level,并将该数据加入森林变化数据集。
[0026]
表2 不同扰动和恢复的程度分级
(二)多源遥感影像数据集构建多源遥感影像数据集在本案例中将用于森林变化驱动力分类。本案例中多源遥感数据包括(一)中生产的森林变化数据集,globaland30土地利用数据集、火灾数据集、地形数据集四类数据,火灾数据集的时间需要与森林变化数据集保持一致,土地利用数据集时间为森林变化数据集的最后一年。
[0027]
表3 多源遥感影像数据集构建
在多源遥感影像数据集构建的过程中,遵循本发明实施方法s2中所述:
①
多源遥感影像包括s1中生产的森林变化数据集,任意来源的土地利用数据集、火灾数据集、地形数据集四类数据。
[0028]
(三)决策树模型对森林变化数据的分类(1)构建森林扰动驱动力与土地利用的关系映射本案例根据案例区域森林变化特征,参照区域特点划分了森林变化驱动力,并建立了森林扰动驱动力与土地利用的关系映射。
[0029]
森林扰动驱动力与土地利用之间的映射关系:森林受到扰动后变为耕地,则驱动力为农业转移;森林受到扰动后依然为森林,则驱动力可能是商品林种植,或者是受到自然灾害扰动,森林自我恢复后土地利用类型仍然为森林,则驱动力为潜在的自然灾害,两者可以通过距离人为活动的范围来判定;森林受到扰动后土地利用类型变为草地、灌木、湿地,则考虑森林退化为森林变化的主要驱动力;森林受到扰动后土地利用类型变为人工地表,则考虑驱动力为人类活动包括建设活动和采矿;森林受到扰动后土地利用类型变为裸地,则考虑驱动力为砍伐;森林受到扰动后土地利用类型为积雪和冰川,则考虑驱动力为潜在的自然灾害。
[0030]
(2)确定森林恢复驱动力与土地利用、地形数据的空间关系在案例研究区域,森林恢复驱动力主要分为自然恢复和人工恢复,根据区域的特点确定如下两个参数:
①
人类活动影响森林的最远距离为5km,设定距离耕地与人工地表的
缓冲区,缓冲区内为人工恢复,缓冲区外为自然恢复;
②
植树造林的坡度限制为45
°
,根据区域特点确定区域内植树造林能到达的最大坡度。
[0031]
(3)根据(1)和(2)确定的映射关系和空间关系,构建决策树模型本案例根据(1)森林扰动驱动力与土地利用的关系映射和(2)森林恢复驱动力与土地利用、地形数据的空间关系,构建了图4的决策树模型用于森林变化驱动力的分类与信息提取。
[0032]
(四)森林变化驱动力地图的生成(1)森林变化数据集作为分类数据输入,参照图4设计的决策树模型中的数据处理流程,输入森林变化数据,包括变化时间信息“年”、变化的时间长度“持续时间”和变化的程度“水平”3个波段,记录了森林变化的年份、持续时间和水平信息;(2)火灾驱动力识别;利用时间匹配方法,将输入的扰动数据与火灾数据在时间和空间上进行匹配,如果在时间和空间上都能实现匹配,则将这些区域记录为火灾引起的扰动;(3)识别其他干扰驱动力;森林退化、商品林种植、农业转移、人类活动和潜在的自然灾害干扰是通过(四)建立的映射关系确定的;(4)识别恢复驱动力;自然恢复和人工恢复由两个阈值来判断,一个是恢复区与人工地表和耕地的距离,另一个是恢复区的坡度数据;(5)森林变化驱动力地图生成;根据(2)和(3)步骤生成的数据合并生成森林变化(扰动)驱动力地图,将(4)步骤生成的数据生成森林变化(恢复)驱动力地图。图5和图6展示了森林变化驱动力分类结果。
[0033]
(五)森林变化驱动力分类精度的评估为验证本案例获得森林变化驱动力结果的有效性和精确性,本案例采集了以下三种数据源生成森林变化驱动力验证样本,使用混淆矩阵评价驱动力的分类结果。验证验证数据源包括:
①
全球火灾图集与个体火灾特征数据(mcd64a1);
②
歌地球高空间分辨率图像采样;
③
)landsat图像可视化界面的互动采样(https://emaprlab.users.earthengine.app/view/lt-geepixel-time-series)。
[0034]
表4和表5展示了本案例对案例区域森林变化驱动力分类结果的评价精度。精度评价结果显示,本方法可以有效区分森林变化驱动力。不同的森林变化(扰动和恢复)驱动力都显示出较高的生产者和用户精度。
[0035]
从扰动驱动力的识别结果来看,总体准确率为81.56%,kappa系数为0.75。不同类别的扰动驱动力的用户准确度和生产者准确度来看,所有类别的扰动驱动力去取得了较好的评价结果。从恢复驱动力的分类评价结果来看,总体准确率为85.28%,kappa系数为0.69。人工恢复林和自然恢复驱动力都取得了较高的生产者准确性和使用者准确性。
[0036]
表4 森林变化(扰动)驱动力分类结果的精度评价
表5 森林变化(恢复)驱动力分类结果的精度评价以上显示和描述了本发明的基本原理和主要特征和本发明的优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明;因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
[0037]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1