一种舰艇水平姿态摇摆周期的计算方法与流程
1.本发明属于船舰艇装备技术领域,具体涉及一种舰艇水平姿态摇摆周期的计算方法。
背景技术:
2.目前,海军舰艇装备的惯性导航类设备(包括基于静电陀螺仪、液浮陀螺仪、挠性陀螺仪、激光陀螺仪、光纤陀螺仪等的惯性导航设备、航姿设备、罗经设备等)均输出纵摇角、横摇角信息,但并未计算纵摇角、横摇角对应的往复周期值。但舰艇官兵在固定翼舰载机、舰载直升机出动回收等场景下,亟需了解舰艇摇摆周期,以对舰载机着舰等动作及时做出决策,以提高任务安全性等任务特性。
技术实现要素:
3.本发明的目的是在于克服现有技术的不足之处,提供一种舰艇水平姿态摇摆周期的计算方法。
4.本发明的上述目的通过如下技术方案来实现:
5.一种舰艇水平姿态摇摆周期的计算方法,其特征在于:摇摆周期选择峰值周期,包括如下步骤:
6.步骤1、面向用户实际需求的水平姿态摇摆周期边界值确定;
7.步骤2、对有效的水平姿态角数据分别进行曲线拟合和提取极值点,其中水平姿态角数据包括舰艇动态纵摇角数据和舰艇动态横摇角数据;
8.步骤3、舰艇水平姿态摇摆周期量化计算;
9.步骤4、面向用户实际需求的舰艇水平姿态摇摆周期定量显示。
10.进一步的:步骤1中进行水平姿态摇摆周期边界值确定,边界条件包括:惯导摇摆角采样频率不低于10hz;惯导摇摆角最大测量误差小于2角分;舰船摇摆角度不小于30角分。
11.进一步的:步骤2包括:
12.2.1、取1s数据采用3次多项式进行拟合,每次拟合后采用滑动窗方式滑动0.1s;设拟合多项式最高次为n,则多项式可表达为:
[0013][0014]
其中,y为姿态角测量值,t为时间,ai为待拟合参数;
[0015]
将惯导输出时刻tk及对应摇摆角yk带入上式,可得关于多项式系数的方程:
[0016]
[0017]
式中,时刻tk是相对于拟合数据段开始时刻的时间间隔,n为待拟合的数据总个数;记
[0018][0019]
根据最小二乘算法解得系数为:
[0020]
x=(a
t
a)-1aty…………………………………
(10)
[0021]
2.2、定义拟合误差为离散时间处拟合曲线与原曲线最大差值,拟合误差δy计算公式如下,设定本方案可接受最大拟合误差为1分;
[0022]
δy=max(y)
…………………………………
(11)
[0023]
式中,y={|y
i-y(ti)||i=1,
……
,n}表示各拟合时刻拟合误差的集合;
[0024]
2.3、计算拟合曲线导数和导数判别式,导数计算公式如下:
[0025][0026]
判别式计算公式如下:
[0027]
δ=(2a2)
2-12a3a1…………………………………
(13)
[0028]
2.4、计算极值点:
[0029]
当判别式大于0时,计算两个极值点,计算公式如下:
[0030][0031]
当a3大于0时,较小极值点为极大值点,较大极值点为极小值点,当a3小于0,较小极值点为极小值点,较大极值点为极大值点;
[0032]
当极值点处于区间[0.3,0.7]中,补偿拟合初始时间后,比同类极值点大0.4s时判定该极值点为有效极值点。
[0033]
进一步的:步骤3中舰艇水平姿态摇摆周期量化计算的规则为:连续两个极大值点中间包含一个极小值点,且两个极大值点与极小值点的摇摆角幅值差都大于30角分,定义两个极大值点时间间隔作为当前时刻摇摆周期;
[0034]
若没有搜索到有效极大值点,则在极大值点列中向前滑动一个极大值点再次进行判断,若距离当前时刻1min内无有效极大值点对,则认为当前舰船平稳,无明显摇摆。
[0035]
进一步的:步骤4中舰艇水平姿态摇摆周期定量显示包括:一、30s内舰艇水平姿态平均摇摆周期;二、60s内舰艇水平姿态平均摇摆周期;三、5min内舰艇水平姿态平均摇摆周期。
[0036]
本发明具有的优点和积极效果:
[0037]
本发明舰艇摇摆周期的计算方法,主要以舰艇动态纵摇角、横摇角参数为输入数据,通过滑窗拟合等方法建立摇摆周期计算方案,运用极值判断等方法进行赋值,最终实现舰艇摇摆周期动态确定,能够为用户提供在线计算的舰艇最近时刻摇摆周期及历时摇摆周期。
附图说明
[0038]
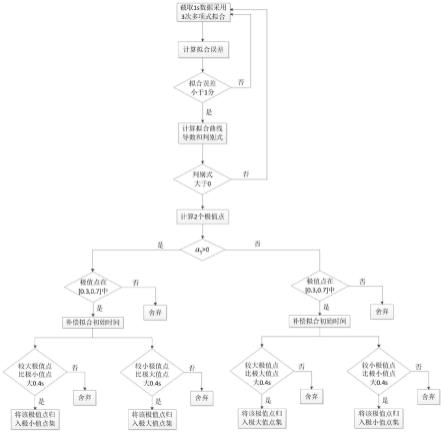
图1是本发明舰船摇摆峰值计算流程图。
具体实施方式
[0039]
以下结合附图并通过实施例对本发明的结构作进一步说明。需要说明的是本实施例是叙述性的,而不是限定性的。
[0040]
一种舰艇水平姿态摇摆周期的计算方法,主要包括:(1)面向用户实际需求的水平姿态摇摆周期边界值确定;(2)对有效的水平姿态角数分别据进行曲线拟合和提取极值点,其中水平姿态角数包括舰艇动态纵摇角数据和舰艇动态横摇角;(3)舰艇水平姿态摇摆周期量化计算;(4)面向用户实际需求的舰艇水平姿态摇摆周期定量显示。具体的:
[0041]
在海浪等外界激励作用下,舰船绕平衡位置作往复摇摆,由于外界激励作用的复杂性,使得舰船的摇摆运动曲线呈现复杂的形态,具有丰富的频谱成分,因此,舰船运动周期的定义也有多种方式,如峰值周期、谱峰周期、谱平均周期等。峰值周期定义为两次摇摆角峰值对应的时间间隔,体现摇摆运动的短时特性,反映上一个摇摆的周期,具有一定的延时特性;谱峰周期定义为一段时间内摇摆频谱成分中幅值最大的周期;谱平均周期是摇摆频谱的一种综合评价,反映一段时间内摇摆能量主要分布的周期。
[0042]
本发明主要以反映短时摇摆周期特性为目的,选择峰值周期作为舰船摇摆周期运动的计算方式。
[0043]
上述面向用户实际需求的水平姿态摇摆周期边界值确定为:在舰艇摇摆幅度过小时,计算摇摆周期的需求不存在。因此,本发明的应用条件如下:
[0044]
1、惯导摇摆角采样频率不低于10hz;
[0045]
2、惯导摇摆角最大测量误差小于2角分;
[0046]
3、舰船摇摆角度不小于30角分,低于30角分时认为舰船处于平稳状态。
[0047]
上述对有效的水平姿态角数分别据进行曲线拟合和提取极值点的计算过程如下:
[0048]
1、取1s数据采用3次多项式进行拟合,每次拟合后采用滑动窗方式滑动0.1s;设拟合多项式最高次为n,则多项式可表达为:
[0049][0050]
其中,y为姿态角测量值,t为时间,ai为待拟合参数。
[0051]
将惯导输出时刻tk及对应摇摆角yk带入上式,可得关于多项式系数的方程:
[0052][0053]
式中,时刻tk是相对于拟合数据段开始时刻的时间间隔,n为待拟合的数据总个数;记
[0054][0055]
根据最小二乘算法解得系数为:
[0056]
x=(a
t
a)-1aty…………………………………
(17)
[0057]
2、定义拟合误差为离散时间处拟合曲线与原曲线最大差值,拟合误差δy计算公式如下,设定本方案可接受最大拟合误差为1分;
[0058]
δy=max(y)
…………………………………
(18)
[0059]
式中,y={|y
i-y(ti)||i=1,
……
,n}表示各拟合时刻拟合误差的集合;
[0060]
3、计算拟合曲线导数和导数判别式,导数计算公式如下:
[0061][0062]
判别式计算公式如下:
[0063]
δ=(2a2)
2-12a3a1…………………………………
(20)
[0064]
4、计算极值点:
[0065]
当判别式大于0时,计算两个极值点,计算公式如下:
[0066][0067]
当a3大于0时,较小极值点为极大值点,较大极值点为极小值点,当a3小于0,较小极值点为极小值点,较大极值点为极大值点;
[0068]
当极值点处于区间[0.3,0.7]中,补偿拟合初始时间后,比同类极值点大0.4s时判定该极值点为有效极值点。
[0069]
上述舰艇水平姿态摇摆周期量化计算规则为:
[0070]
连续两个极大值点中间包含一个极小值点,且两个极大值点与极小值点的摇摆角幅值差都大于30角分,定义两个极大值点时间间隔作为当前时刻摇摆周期;
[0071]
若没有搜索到有效极大值点,则在极大值点列中向前滑动一个极大值点再次进行判断,若距离当前时刻1min内无有效极大值点对,则认为当前舰船平稳,无明显摇摆。
[0072]
面向用户实际使用需求,提供如下摇摆周期显示,供用户任务决策使用:一是30s内舰艇水平姿态平均摇摆周期;二是60s内舰艇水平姿态平均摇摆周期;三是5min内舰艇水平姿态平均摇摆周期。
[0073]
本发明可达到的性能指标如下:
[0074]
1、周期计算误差≤1s;
[0075]
2、周期计算延时≤1min。
[0076]
尽管为说明目的公开了本发明的实施例和附图,但是本领域的技术人员可以理解:在不脱离本发明及所附权利要求的精神范围内,各种替换、变化和修改都是可以的,因此,本发明的范围不局限于实施例和附图所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1