基于数据融合的变电站故障诊断方法与流程
1.本发明涉及变电站故障诊断技术领域,具体涉及一种基于数据融合的变电站故障诊断方法。
背景技术:
2.随着我国电网负荷的持续增长、环境监管的愈加严格,以及跨区域电网规模的不断扩大、结构和运行的日益复杂,变电站中影响其稳定运行的各种不确定因素也有所增加,变电站故障引起大规模停电事故的风险亦有所升高。在这种情况下,在故障时快速准确的对其进行分析,以便及时消除故障的影响,保障变电站安全、稳定运行,也随之更加具有现实意义。
3.当电力系统中发生故障时,调度自动化系统会在较短时间内将大量的信息提供给运行人员,不仅给运行人员的分析带来不便,其中也包含了大量不必要上传的无用信息,这给故障的及时处理带来了严重的阻碍。另外,scada/ems所能提供的信息有限,这些信息并不能完全满足运行人员对故障进行全面分析的需求。保护和开关的误动、拒动,以及因通信信道干扰所造成的信息缺失,也均会使基于单一信息源的故障分析的准确性受到严重影响。
技术实现要素:
4.针对现有技术的不足,本发明提供一种基于数据融合的变电站故障诊断方法,该方法能够有效地精简用于故障分析的信息,并充分地利用故障录波等智能设备的信息,通过冗余、异构的多信息源数据融合,有效地减小因保护及开关的误动、拒动、以及因信道干扰造成的信息缺失等的影响。该方法有助于运行人员对故障的正确分析,进而保证及时对故障进行处理,从而保障变电站的安全、稳定运行。
5.本发明采取的技术方案为:
6.基于数据融合的变电站故障诊断方法,包括以下步骤:
7.步骤一:获取故障信号,包括电气设备振动信号、电气设备声波信号;
8.步骤二:通过hht对电气设备故障信号进行分析,并提取故障的特征;
9.步骤三:构建基于rbf神经网络的动态网络结构在线训练算法;
10.步骤四:基于hht与rbf神经网络,进行初步故障诊断;
11.步骤五:基于d-s证据理论数据融合,得到故障诊断结果。
12.所述步骤二包括如下步骤:
13.步骤2.1、经验模态分解emd:
14.以采集的振动信号为例,首先确定振动信号s(t)全部最大值点和最小值点,然后用三次样条差值拟合最大值点和最小值点,从而得到上下包络线的均值m1(t),最后利用式(1)得到原始信号s(t)与包络线均值m1(t)之间的差值。
15.h1(t)=s(t)-m1(t)
ꢀꢀꢀ
(1);
16.上述过程称为一次筛分,在正常的情况下h1(t)就是第一个imf分量,可大多时候并不能满足,需要多次重复上述“筛分”的过程,直得h
1k
(t)符合imf分量的要求。然后把h1(t)当作一个崭新的原始信号,不断重复上述过程k次,直至符合判据(2)。
[0017][0018]
其中:sd表示的是两个连续处理结果之间的标准差,一般情况sd的值介于0.2—0.3时,能确保固有模态函数的线性和稳定性,t表示信号的时间跨度,h
1(k-1)
(t)表示第k-1次的固有模态函数,h
1k
(t)表示第k次的固有模态函数;
[0019]
重复进行筛分k次得:
[0020]h1k
(t)=h
1(k-1)
(t)-m
1k
(t)
ꢀꢀꢀ
(3);
[0021]h1k
(t)表示第k次的固有模态函数,m
1k
(t)为h
1k
(t)的包络平均值。
[0022]
记c1(t)=h
1k
(t),c1(t)即为通过分解得到的第一个固有模态函数imf分量,c1(t)是信号中较高频率的部分,将其从原始振动信号s(t)中分离,如式(4)得到低频率的部分r1(t)。
[0023]
r1(t)=s(t)-c1(t)
ꢀꢀꢀ
(4);
[0024]
将r1(t)作为原始振动信号,重复上述过程,得到第二个固有模态函数imf分量c2(t);
[0025]
重复n次,得到n个imf分量:
[0026][0027][0028]
其中,r1(t)表示第一次分解得到的低频率部分,r2(t)表示上述第二次分解后得到的低频率部分,c2(t)表示第二个固有模态函数imf分量;
[0029]rn
(t)表示第n次分解得到的低频率部分,r
n-1
(t)第n-1次分解得到的低频率部分,cn(t)表示得到的第n个imf分量;
[0030]
上述分解的过程停止的条件:若rn(t)分解为一个单调函数则停止,由于单调函数不能再分解出固有模态函数。
[0031]
由式(4)和式(5)可得:
[0032][0033]
如式(6),原振动信号s(t)被分解为n个imf分量ci(t)和一个剩余分量rn(t);ci(t)表示第i个固有模态函数imf分量;
[0034]
步骤2.2、hilbert分析和hilbert边际谱:
[0035]
振动信号s(t)的hilbert变换定义为
[0036][0037]
式中:pv代表柯西主值,一般取1。
[0038]
s(τ)表示时间常数τ的函数;
[0039]
τ表示时间常数;
[0040]
则s(t)的解析信号z(t)为:
[0041]
z(t)=s(t)+jy(t)=a(t)e
jθ(t)
ꢀꢀꢀ
(8);
[0042]
j表示虚数单位,e
jθ(t)
表示欧拉公式的基本形式;
[0043]
式中:为瞬时幅值,表示相位;
[0044]
在此基础上定义瞬时频率:
[0045][0046]
假如已经得到一个振动信号s(t)的固有模态函数,就能将每个固有模态函数进行希尔伯特变换,再根据公式(10)来计算瞬时频率;式(6)的每个imf进行hilbert变换可以得到
[0047][0048]
上式中,re表示的是实部,在计算过程中省去了rn(t),由于其是一个单调函数或表示一个常量,在进行希尔伯特时频变换时一般情况下不涉及剩余分量,因为它代表了长期的趋势,是长周期的振荡,能量较大,所以我们更加关注的是高频低能量部分。
[0049]ai
(t)表示瞬时幅值;θ(t)表示相位;ωi(t)表示瞬时频率;
[0050]
将振幅显示在频率-时间平面上,则可得到hilbert谱h(ω,t)
[0051][0052]
进一步能定义边际谱h(ω):
[0053][0054]
其中,t是振动信号的全部采样持续的时间,h(ω,t)是振动信号的希尔伯特时频谱。
[0055]
步骤2.3、提取特征变量:
[0056]
为更好利用hht对电气设备故障信号进行分析,并提取故障的特征现定义振动信号分解后各模态的平均能量为:
[0057][0058]
其中,n表示每个模态函数的数据点数,为式(8)中瞬时幅值,ei表示各模态的平均能量。
[0059]
分解后每层的总平均能量为:
[0060][0061]
则能量归一化处理后每层所占的能量比为:
[0062][0063]
由于hht分解后的第一层、第二层和其余剩余各层的能量比之和可以较好地表征故障信息,所以选取这3个能量比作为特征变量,分别为m1、m2、m3,即作为步骤3中rbf神经网络的输入,同理声波信号的特征量提取方法与振动信号相同,声波信号提取的特征量为m
*1
、m
*2
、m
*3
。
[0064]
所述步骤三包括如下步骤:
[0065]
步骤3.1:分析rbf神经网络的变换关系:
[0066]
rbf神经网络是一种三层前馈网络,包括输入层、隐含层、输出层,一般情况下采用高斯函数作为径向基函数,又用径向基函数组成隐含层空间,输入层空间到隐含层空间的变换是非线性的,而隐含层空间到输出层空间的变换是线性的,即对隐单元输出的线性加权求和可以得到输出。
[0067]
假设输入数据的维数是n,隐含层的单元数是p,输出量的维数是o,则神经网络的变换关系可以分解成两部分:
[0068]
输入到隐含层的非线性变换:
[0069]
将高斯函数作为隐含层的径向基函数的表达式如式(16)所示,即第i个隐单元输出为:
[0070][0071]
式中,m表示n维输入量,即m=[m1,m2,
…
,mn]
t
;m1,m2,
…
,mn表示输入量中的元素;ti表示权值;σi表示基函数单元的宽度,表示第i节点的中心向量;
[0072]
表示中心向量元素;||
·
||表示范数,p表示隐含层单元数。
[0073]
从隐含层到输出层的线性变换,第j个输出量:
[0074][0075]
式中,表示式(16)第i个隐单元输出,ω
ij
表示第i个隐单元与第j个输出量之间的连接权,ωj表示校正量;p隐含层是的单元数,o是输出量的维数。
[0076]
步骤3.2、构建rbf神经网络的在线训练算法:
[0077]
在线训练算法实事上就是一种变结构的rbf神经网络,当输入数据时,可以同时选择“中心”位置并校正网络参数,若数据集合由n个样本组成,对第i[mi,yi]个样本。该算法主要是两个部分组成:
[0078]
在线分配隐含层单元(确定合适的中心):
[0079]
假设输入的维数是n,隐含层单元的数量为p,输出维数是o,对给定样本[m,y],假设神经网络的输出为t,设e=y-t,若满足:
[0080]
||e||≥ε
ꢀꢀꢀ
(18);
[0081]
||m-c
*
||≥δ(t)
ꢀꢀꢀ
(19);
[0082]
就可以分配一个隐含层单元,其中心位置cn=m,连接的相关权值w=e,变换单元
的宽度σ=k
·
σ(t),式中c
*
表示神经网络所有“中心”位置中与m最近的一个中心ε,δ(t)表示给定的阈值,m表示输入量,w=[ω1,ω2,
…
,ωn]表示各输入数据与神经元之间的连接权值向量。
[0083]
网络参数调整:
[0084]
rbf神经网络的训练主要是通过校正网络的三个参数,包括中心位置c,变换单元的宽度σ,以及权值ωi,这样使网络训练性能趋向于最优解,同时可以满足误差及精度的要求。
[0085]
取性能指标e
p
为:
[0086][0087]
其中,o为输出维数,yi为期望输出值,为实际输出值。
[0088]
结合式(16)、式(17)以及上式(20)可得:
[0089][0090]
从公式(21)中就可以看出性能指标e
p
是关于线性连接权值ωi、中心位置和宽度σi的函数,即当性能指标e
p
达到极小值时,此时神经网络趋向于最优解。
[0091]
所述步骤四,具体如下:
[0092]
利用步骤二中hht方法提取到的3个能量比特征量m1、m2、m3作为rbf神经网络的输入,神经网络输出的目标值设为1,用编号0、1、2、3分别对应于变电站电气设备的正常状态、机械动作失灵、机构卡涩和基座松动故障;
[0093]
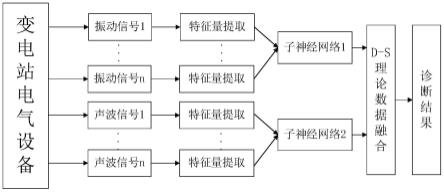
对变电站电气设备振动信号和声波信号分别用基于hht和rbf相结合的方法组成两个不同的子网络,用子网络1和子网络2表示,如图1所示。
[0094]
首先,分别选取20组变电站电气设备正常状态、机械动作失灵、机构卡涩和基座松动时振动信号提取的特征量m1、m2、m3作为样本用于rbf神经网络的训练,然后选取典型数据来检测rbf神经网络,网络的隐含层节点数为18个,可以得出子神经网络1的故障诊断结果,
[0095]
例如:发生基座松动故障时,子神经网络1的输出结果为正常状态概率m1(a1)、机械动作失灵m1(a2)、机构卡涩m1(a3)、基座松动m1(a4)、不确定性故障(其他故障)m1(θ)。同理可以选取20组变电站电气设备正常状态、机械动作失灵、机构卡涩和基座松动时声波信号提取的特征量m
*1
、m
*2
、m
*3
作为样本用于rbf神经网络的训练,也以发生基座松动故障时为例,可以得出子神经网络2的故障诊断结果正常状态概率m2(a2)、机械动作失灵m2(a2)、机构卡涩m2(a3)、基座松动m2(a4)、不确定性故障(其他故障)m2(θ)。
[0096]
所述步骤五,具体如下:
[0097]
5.1、d-s证据理论:
[0098]
假设用θ表示一个识别框架,它由全体对象θi组成,θ=[θ1,θ2...θn]。其可能存在的子集2
θ
由θ全部子集组成,如果m:2
θ
→
[0,1]是基本概率分配函数,它能够满足式(22)。
[0099][0100]
其中,a为证据体、m(a)为a基本概率赋值,表示的是对a的信任程度,m称为在框架θ上的信任函数分配,φ为空集,m(φ)表示空集基本概率赋值。
[0101]
如果证据理论的结果在某个区间内,则代表对于某种事件可能性的大小,它的最小值被称为信任函数,如式(22)所示,而它的最大值被称为似然函数,如式(23)
[0102][0103]
其中函数bel(a)为识别框架上的信任函数,b为证据体、m(b)为b基本概率赋值。
[0104]
pl(a)=∑
b∩a≠φ
m(b)
ꢀꢀꢀ
(23);
[0105]
其中:函数pl(a)为识别框架上的似真度函数,又称作似然函数,指的是信任程度的上限估计。
[0106]
d-s证据理论的基本原理是将证据集合划分为几个不相关的子集,然后分别利用它们对识别框架独立地进行判断,最后利用证据理论组合规则将它们组合起来。例如设m1,m2...,mn是2
θ
的基本概率分配函数,则有:
[0107][0108]
其中,
[0109]
则式(24)就是合成法则,k表示不确定因子,用于表征各个证据之间的矛盾,且0≤k≤1,k的值若变大表示各个证据之间的矛盾变大,当k=1时则完全矛盾,就不能将它们进行基本概率赋值组合。
[0110]
证据理论输出结果包含着对识别框架单元的基本概率赋值,对证据理论输出的决策如下:
[0111]
设满足:
[0112][0113][0114]
若有:
[0115][0116]
那么:a1就是判决结果,其中ε1,ε2为预先设好的门限,其中各变量的含义在上文中均有解释。
[0117]
5.2、数据融合:
[0118]
由步骤四两个子神经网络进行初步诊断得到的结果用公式(24)融合,我们将变电站电气设备故障诊断的识别框架表示为{正常状态,机械动作失灵,机构卡涩,基座松动},
幂元素集为{(正常状态),(机械动作失灵),(机构卡涩),(基座松动),(其他故障)},其中元素(其他故障)代表的是不能区分的故障,利用证据理论的数据融合规则来计算变电站电气设备振动信号和声波信号结果。
[0119]
以正常状态计算的方法为例:
[0120][0121][0122][0123]
其他各种状态的计算方法与上面相同。
[0124]
通过上述步骤,完成基于数据融合的变电站电气设备故障诊断方法。
[0125]
本发明提出一种基于数据融合的变电站电气设备故障诊断方法,技术效果如下:
[0126]
1)本发明hht(hilbert-huang transform希尔伯特-黄变换)对解决非线性问题具有非常不错的效果,非线性信号经过经验模态分解后得到的各个imf代表着故障信号的基本信息,hht相对于傅里叶变换与小波变换,由于变换中的基函数选取完全来源于信号本身,所以其具有非常好的自适应性。
[0127]
2)本发明基于rbf神经网络和d-s证据理论融合的故障诊断过程,实用简单,能快速有效的对变电站电气设备进行故障诊断,有效保证故障诊断的计算效率和精度。
[0128]
3)该方法实用简单,能快速有效的对变电站电气设备进行故障诊断,保证故障诊断的计算效率和精度,且利用神经网络与证据理论的结合,能够有效地提高了诊断系统对故障类型的分类识别能力,并减小因为保护及开关的误动、拒动和因信道干扰造成的信息缺失等的影响。
附图说明
[0129]
图1为本发明总故障诊断模型示意图。
具体实施方式
[0130]
如图1所示,基于数据融合的变电站故障诊断方法,包括以下步骤:
[0131]
步骤1:获取故障信号;
[0132]
步骤1.1获取电气设备振动信号:
[0133]
使用lc0519加速度传感器来获取变电站电气设备振动信号,通过高速采集卡usb-7648a将加速度传感器采集到的信号通过usb数据总线传输到主机,在没有负载的情况下,数据采集卡用20khz/s的采样频率来采集电气设备运行中的振动信号,采样时间为0.25s,将获取的振动信号记作s(t)。
[0134]
步骤1.2:获取电气设备声波信号:
[0135]
由于电气设备在动作过程中会发出不同的声响,我们选择能够表示设备运行状态
的声音信号来进行监测。可以利用chz型3hz-18khz的电容传感器来获取声波信号,并用传感器摆放位置不同使其具有不同的声强变化。在选择频率时,还要避免发生混叠现象,在保证信号不失真的情况下,满足后续信号的处理条件。计算机声卡可以完成频率为40khz的声音信号采样,所以可以满足变电站电气设备故障诊断的声波信号频谱测试要求,将获取的声波信号记作x(t)。
[0136]
步骤2:通过hht(hilbert-huang transform)对电气设备故障信号进行分析,并提取故障的特征;
[0137]
hht一般都是利用经验模态分解(empirical mode decomposition-emd),把信号分成不同本征模态函数(intrinsic mode function-imf),然后对imf进行hilbert变换,得到每一分量的瞬时频率和瞬时幅值,进而可以得到信号的hilbert谱。
[0138]
步骤2.1、经验模态分解emd:
[0139]
以采集的振动信号为例,首先确定振动信号s(t)全部最大值点和最小值点,然后用三次样条差值拟合最大值点和最小值点,从而得到上下包络线的均值m1(t),最后利用式(1)得到原始信号s(t)与包络线均值m1(t)之间的差值。
[0140]
h1(t)=s(t)-m1(t)
ꢀꢀꢀ
(1);
[0141]
上述过程称为一次筛分,在正常的情况下h1(t)就是第一个imf分量,可大多时候并不能满足,需要多次重复上述“筛分”的过程,直得h
1k
(t)符合imf分量的要求。然后把h1(t)当作一个崭新的原始信号,不断重复上述过程k次,直至符合判据(2)。
[0142][0143]
其中:sd表示的是两个连续处理结果之间的标准差,一般情况sd的值介于0.2—0.3时,能确保固有模态函数的线性和稳定性,t表示信号的时间跨度,h
1(k-1)
(t)和h
1k
(t)表示在筛选固有模态函数过程中两个连续的处理结果的时间序列。
[0144]
重复进行“筛分”的过k次得:
[0145]h1k
(t)=h
1(k-1)
(t)-m
1k
(t)
ꢀꢀꢀ
(3);
[0146]h1k
(t)表示第k次的固有模态函数,m
1k
(t)为h
1k
(t)的包络平均值。
[0147]
记c1(t)=h
1k
(t),c1(t)即为通过分解得到的第一个固有模态函数(imf)分量,c1(t)是信号中较高频率的部分,将其从原始振动信号s(t)中分离,如式(4)得到低频率的部分r1(t)。
[0148]
r1(t)=s(t)-c1(t)
ꢀꢀꢀ
(4);
[0149]
将r1(t)作为原始振动信号,重复上述过程,得到第二个固有模态函数(imf)分量c2(t);
[0150]
重复n次,得到n个imf分量:
[0151][0152]
其中,r1(t)表示第一次分解得到的低频率部分,r2(t)表示上述第二次分解后得到
的低频率部分,c2(t)表示第二个固有模态函数(imf)分量。
[0153]rn
(t)表示第n次分解得到的低频率部分,r
n-1
(t)第n-1次分解得到的低频率部分,cn(t)表示得到的第n个imf分量
[0154]
上述分解的过程停止的条件:若rn(t)分解为一个单调函数则停止,由于单调函数不能再分解出固有模态函数。
[0155]
由式4和式5可得:
[0156][0157]
如式(6),原振动信号s(t)被分解为n个imf分量ci(t)和一个剩余分量rn(t)。
[0158]
步骤2.2、hilbert分析和hilbert边际谱:
[0159]
振动信号s(t)的hilbert变换定义为
[0160][0161]
式中:pv代表柯西主值,一般取1。
[0162]
则s(t)的解析信号z(t)为
[0163]
z(t)=s(t)+jy(t)=a(t)e
jθ(t)
ꢀꢀꢀ
(8);
[0164]
式中:为瞬时幅值,表示相位
[0165]
在此基础上定义瞬时频率:
[0166][0167]
假如已经得到一个振动信号s(t)的固有模态函数,我们就能将每个固有模态函数进行希尔伯特变换,再根据公式(10)来计算瞬时频率。式(6)的每个imf进行hilbert变换可以得到
[0168][0169]
上式中re表示的是实部,在计算过程中省去了rn(t),由于其是一个单调函数或表示一个常量,在进行希尔伯特时频变换时一般情况下不涉及剩余分量,因为它代表了长期的趋势,是长周期的振荡,能量较大,所以我们更加关注的是高频低能量部分。
[0170]
将振幅显示在频率-时间平面上,则可得到hilbert谱h(ω,t)
[0171][0172]
进一步能定义边际谱h(ω):
[0173][0174]
其中,t是振动信号的全部采样持续的时间,h(ω,t)是振动信号的希尔伯特时频谱。
[0175]
步骤2.3、提取特征变量:
[0176]
为更好利用hht对电气设备故障信号进行分析,并提取故障的特征现定义振动信
号分解后各模态的平均能量为:
[0177][0178]
其中,n表示每个模态函数的数据点数,为式(8)中瞬时幅值,ei表示各模态的平均能量。
[0179]
分解后每层的总平均能量为:
[0180][0181]
则能量归一化处理后每层所占的能量比为:
[0182][0183]
由于hht分解后的第一层、第二层和其余剩余各层的能量比之和可以较好地表征故障信息,所以选取这3个能量比作为特征变量,分别为m1、m2、m3,即作为步骤3中rbf神经网络的输入,同理声波信号的特征量提取方法与振动信号相同,声波信号提取的特征量为m
*1
、m
*2
、m
*3
。
[0184]
步骤3:基于rbf神经网络的动态网络结构在线训练算法:
[0185]
步骤3.1:rbf神经网络的变换关系
[0186]
rbf神经网络是一种三层前馈网络,包括输入层、隐含层、输出层,一般情况下采用高斯函数作为径向基函数,又用径向基函数组成隐含层空间,输入层空间到隐含层空间的变换是非线性的,而隐含层空间到输出层空间的变换是线性的,即对隐单元输出的线性加权求和可以得到输出。
[0187]
假设输入数据的维数是n,隐含层的单元数是p,输出量的维数是o,则神经网络的变换关系可以分解成两部分:
[0188]
输入到隐含层的非线性变换:
[0189]
将高斯函数作为隐含层的径向基函数的表达式如式(16)所示,即第i个隐单元输出为:
[0190][0191]
式中,m表示n维输入量,即m=[m1,m2,
…
,mn]
t
,σi表示基函数单元的宽度,表示第i节点的中心向量,表示的是第i个中心位置对应的第k个输入分量。||
·
||表示范数,p表示隐含层单元数。
[0192]
从隐含层到输出层的线性变换,第j个输出量:
[0193][0194]
式中,表示式(16)第i个隐单元输出,ω
ij
表示第i个隐单元与第j个输出量之间的连接权,ωj表示校正量。
[0195]
步骤3.2:rbf神经网络的在线训练算法
[0196]
在线训练算法实事上就是一种变结构的rbf神经网络,当输入数据时,可以同时选择“中心”位置并校正网络参数,若数据集合由n个样本组成,对第i[mi,yi]个样本。该算法主要是两个部分组成:
[0197]
在线分配隐含层单元(确定合适的中心):
[0198]
假设输入的维数是n,隐含层单元的数量为p,输出维数是o,对给定样本[m,y],假设神经网络的输出为t,设e=y-t,若满足:
[0199]
||e||≥ε
ꢀꢀꢀ
(18);
[0200]
||m-c
*
||≥δ(t)
ꢀꢀꢀ
(19);
[0201]
就可以分配一个隐含层单元,其中心位置cn=m,连接的相关权值w=e,变换单元的宽度σ=k
·
σ(t),式中c
*
表示神经网络所有“中心”位置中与m最近的一个中心ε,δ(t)表示给定的阈值,m表示输入量,w=[ω1,ω2,
…
,ωn]表示各输入数据与神经元之间的连接权值向量。
[0202]
网络参数调整:
[0203]
rbf神经网络的训练主要是通过校正网络的三个参数,包括中心位置c,变换单元的宽度σ,以及权值ωi,这样使网络训练性能趋向于最优解,同时可以满足误差及精度的要求。
[0204]
取性能指标e
p
为:
[0205][0206]
其中,o为输出维数,yi为期望输出值,为实际输出值。
[0207]
结合式(16)、式(17)以及上式(20)可得:
[0208][0209]
式中所有字母含义在上文中均有解释。
[0210]
我们从公式(21)中就可以看出性能指标e
p
是关于线性连接权值ωi、中心位置和宽度σi的函数,即当性能指标e
p
达到极小值时,此时神经网络趋向于最优解。
[0211]
步骤4、基于hht和rbf神经网络的初步故障诊断:
[0212]
基于hht和rbf网络的变电站电气设备故障诊断具体结合过程如下,利用步骤2中hht方法提取到的3个能量比特征量m1、m2、m3作为rbf神经网络的输入,神经网络输出的目标值设为1,用编号0、1、2、3分别对应于变电站电气设备的正常状态、机械动作失灵、机构卡涩和基座松动故障。对变电站电气设备振动信号和声波信号分别用基于hht和rbf相结合的方法组成两个不同的子网络,用子网络1和子网络2表示,如附图1所示。首先,分别选取20组变电站电气设备正常状态、机械动作失灵、机构卡涩和基座松动时振动信号提取的特征量m1、m2、m3作为样本用于rbf神经网络的训练,然后选取典型数据来检测rbf神经网络,网络的隐含层节点数为18个,可以得出子神经网络1的故障诊断结果,例如发生基座松动故障时,子神经网络1的输出结果为正常状态概率m1(a1)、机械动作失灵m1(a2)、机构卡涩m1(a3)、基座
松动m1(a4)、不确定性故障(其他故障)m1(θ)。同理可以选取20组变电站电气设备正常状态、机械动作失灵、机构卡涩和基座松动时声波信号提取的特征量m
*1
、m
*2
、m
*3
作为样本用于rbf神经网络的训练,也以发生基座松动故障时为例,可以得出子神经网络2的故障诊断结果正常状态概率m2(a2)、机械动作失灵m2(a2)、机构卡涩m2(a3)、基座松动m2(a4)、不确定性故障(其他故障)m2(θ)。
[0213]
步骤5、基于d-s证据理论数据融合,得到故障诊断结果:
[0214]
步骤5.1:d-s证据理论:
[0215]
假设用θ表示一个识别框架,它由全体对象θi组成,θ=[θ1,θ2...θn]。其可能存在的子集2
θ
由θ全部子集组成,如果m:2
θ
→
[0,1]是基本概率分配函数,它能够满足式(22)。
[0216][0217]
其中,a为证据体、m(a)为a基本概率赋值,表示的是对a的信任程度,m称为在框架θ上的信任函数分配,φ为空集,m(φ)表示空集基本概率赋值。
[0218]
如果证据理论的结果在某个区间内,则代表对于某种事件可能性的大小,它的最小值被称为信任函数,如式(22)所示,而它的最大值被称为似然函数,如式(23)
[0219][0220]
其中函数bel(a)为识别框架上的信任函数,b为证据体、m(b)为b基本概率赋值。
[0221]
pl(a)=∑
b∩a≠φ
m(b)
ꢀꢀꢀ
(23);
[0222]
其中函数pl(a)为识别框架上的似真度函数,又称作似然函数,指的是信任程度的上限估计。
[0223]
d-s证据理论的基本原理是将证据集合划分为几个不相关的子集,然后分别利用它们对识别框架独立地进行判断,最后利用证据理论组合规则将它们组合起来。例如设m1,m2...,mn是2
θ
的基本概率分配函数,则有:
[0224][0225]
其中,其余各变量的含义在上文中均有解释。
[0226]
则式(24)就是合成法则,k表示不确定因子,用于表征各个证据之间的矛盾,且0≤k≤1,k的值若变大表示各个证据之间的矛盾变大,当k=1时则完全矛盾,就不能将它们进行基本概率赋值组合。
[0227]
证据理论输出结果包含着对识别框架单元的基本概率赋值,对证据理论输出的决策如下:
[0228]
设满足:
[0229]
[0230][0231]
若有:
[0232][0233]
那么:a1就是判决结果,其中ε1,ε2为预先设好的门限,其中各变量的含义在上文中均有解释。
[0234]
步骤5.2、数据融合:
[0235]
由步骤4两个子神经网络进行初步诊断得到的结果用公式(24)融合,我们将变电站电气设备故障诊断的识别框架表示为{正常状态,机械动作失灵,机构卡涩,基座松动},幂元素集为{(正常状态),(机械动作失灵),(机构卡涩),(基座松动),(其他故障)},其中元素(其他故障)代表的是不能区分的故障,利用证据理论的数据融合规则来计算变电站电气设备振动信号和声波信号结果。以正常状态计算的方法:
[0236][0237][0238][0239]
其他各种状态的计算方法与上面相同。
[0240]
通过上述步骤,完成基于数据融合的变电站电气设备故障诊断方法。
[0241]
实施算例:
[0242]
在matlab环境下进行算例仿真。
[0243]
由步骤2的hht方法,将获取的振动信号进行特征提取,以电气设备正常状态信号为例,正常信号固有模态函数的平均瞬时频率和能量比如表1所示。
[0244]
表1 正常信号固有模态函数的平均瞬时频率和能量比
[0245][0246]
由表1可以看出,电气设备正常信号的主要能量集中在第1阶段和第2阶段,分别占66.32%和9.79%,而剩余各阶段的总能量比仅占9.30%左右,所有我们将剩余各阶段的能量比之和作为一个新的成分m3来进行处理,可以用同样的方式对其他信号进行处理。
[0247]
表2 不同信号的能量比
[0248][0249]
将这3个特征变量做为神经网络的输入量,并将rbf神经网络输出值设为1,然后将变电站电气设备的正常状态、机械动作失灵、机构卡涩和基座松动故障标记为0、1、2、3。对变电站电气设备振动信号和声波信号分别用基于hht和rbf神经网络结合的方法组成两个不同的子神经网络,用子神经网络1和子网络神经2表示,首先,分别选取20组变电站电气设备正常状态、机械动作失灵、机构卡涩和基座松动时振动信号提取的特征量m1、m2、m3作为样本用于rbf神经网络的训练,然后选取典型数据来检测rbf神经网络,网络的隐含层节点数为18个,可以得出子神经网络1的故障诊断结果,例如发生基座松动故障时,子神经网络1的输出结果为正常状态概率m1(a1)、机械动作失灵m1(a2)、机构卡涩m1(a3)、基座松动m1(a4)、不确定性故障(其他故障)m1(θ)。同理可以选取20组变电站电气设备正常状态、机械动作失灵、机构卡涩和基座松动时声波信号提取的特征量m
*1
、m
*2
、m
*3
作为数据样本用作rbf神经网络的训练,也以发生基座松动故障时为例,可以得出子神经网络2的故障诊断结果正常状态概率m2(a1)、机械动作失灵m2(a2)、机构卡涩m2(a3)、基座松动m2(a4)、不确定性故障(其他故障)m2(θ),仿真结果如表3和表4所示。
[0250]
表3 子神经网络1的诊断结果
[0251][0252]
表4 子神经网络2的诊断结果
[0253][0254]
再利用步骤5基于d-s证据理论数据融合,将两个子神经网络的初步诊断结果进行融合,结合表3和表4,用公式(28)、公式(29)、公式(30),计算结果如表5所示
[0255]
表5 证据理论数据融合后诊断结果
[0256][0257]
由表5可以看出,基于数据融合的变电站电气设备故障诊断方法有极高的准确率,验证了所用方法的有效性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1