城市轨道交通车辆系统风险点分级方法及系统
1.本发明涉及城市轨道交通运营维护技术领域,具体涉及一种城市轨道交通车辆系统风险点分级方法及系统。
背景技术:
2.车辆系统作为完成城市轨道系统安全、高效位移使命的核心装备系统之一,具有运行环境复杂、启动频繁、部件高度集中的特点,部件的故障可能会影响到车辆的安全运行。在研究城轨车辆运营安全问题时,现有方案更多地注重于提高部件可靠性的角度。但城轨车辆并不是独立存在的,在其运营过程中,人、机、环也是会影响到它的状态。
3.通过对城轨运营风险评估相关的国内外文献研究进行分析,发现专家学者们针对城轨运营风险评估取得了一定研究成果。但是,目前针对城轨运营风险的研究也存在一些不足,主要表现为:一是对风险的评估方法标准不统一,大多采用定性、定量或者二者相结合的方法,并且可能会在实际应用过程中不易推广;二是在确定风险指标权重时,往往采用专家打分法,具有较强的主观性,无法准确反映实际情况;三是对城轨运营车辆系统的风险评估研究内容较少,更偏重于城轨系统整体的研究。
技术实现要素:
4.本发明的目的在于提供一种城市轨道交通车辆系统风险点分级方法及系统,以解决上述背景技术中存在的至少一项技术问题。
5.为了实现上述目的,本发明采取了如下技术方案:
6.一方面,本发明提供一种城市轨道交通车辆系统风险点分级方法,包括:
7.分析获取出城轨车辆系统中的部件组成和部件的连接关系;
8.确定部件的结构重要度指标、部件功能重要度指标和基于事故数据的关键性指标;
9.基于遗传算法的k-means++算法,确定分级数和聚类结果;
10.应用随机森林的基尼重要性量化三类指标的权重,计算确定聚类结果与分级级别的对应关系;
11.以集合论为指导,形成城轨车辆风险点集分级结果。
12.优选的,总结城轨车辆系统的子系统主要构成和工作原理,将城轨车辆系统主要分为车体及内装、辅助供电、列车控制、牵引、制动、转向架六个子系统;在分析各子系统的部件组成时,规定最小的维修单元为部件;分析归纳部件间的连接关系,将部件间的连接关系划分为机械连接、电气连接和信息连接三种形式。
13.优选的,确定部件的结构重要度指标、部件功能重要度和基于事故数据的关键性指标,包括:
14.在leaderrank算法的基础上,引入综合考虑部件功能依赖度和部件可靠度来描述部件功能重要度评估指标;
15.引入拟拉普拉斯中心度来衡量部件的结构重要度,拟拉普拉斯中心度方法综合考虑了节点自身的重要性和其邻居的重要性,基于对移除节点引起的拟拉普拉斯能量的变化,得到部件的结构重要度;
16.将城轨车辆系统的部件看作关键词,以马尔可夫状态转移模型与词图结合,融合tf-idf算法与textrank算法,将求解到的tf-idf值作为词图中节点的初始值,将词语在句子中的同时出现的频率作为节点转移概率,参与textrank算法的迭代,得到基于事故数据的城轨车辆部件关键性指标。
17.优选的,将k-means++的目标函数的倒数作为适应度函数,提出基于遗传算法的k-means++算法来得到分级数和聚类结果。
18.优选的,基于遗传算法得到的最优聚类结果作为随机森林的训练集输入,并以基尼重要性来衡量指标的权重;将三类指标的原始取值与经过遗传算法得到的最优聚类结果作为随机森林的输入,可以得到每个指标对应的基尼重要性,即各指标的权重;通过输入不同样本集的类别数值k,得到最优的k值和聚类结果;将三类指标的权重值与聚类结果结合,得到各聚类类别的平均重要度,最终获取分级结果;对比最终分级结果值,数值最大的为风险点一级,以此类推,数值最小的为风险点k级,将聚类结果与分级结果对应起来,得到城轨车辆系统风险点分级结果。
19.优选的,城轨车辆系统包括车体及内装、辅助供电、列车控制、牵引、制动和转向架六个子系统,每个子系统都有其独自的风险点集;基于每个子系统都有其独自的风险点集,以风险点分级结果为依据,在集合论的基础上构建城轨车辆系统风险点集。
20.第二方面,本发明提供一种城市轨道交通车辆系统风险点分级系统,包括:
21.获取模块,用于分析获取出城轨车辆系统中的部件组成和部件的连接关系;
22.第一计算模块,用于确定部件的结构重要度指标、部件功能重要度指标和基于事故数据的关键性指标;
23.聚类模块,用于基于遗传算法的k-means++算法,确定分级数和聚类结果;
24.第二计算模块,用于应用随机森林的基尼重要性量化三类指标的权重,计算确定聚类结果与分级级别的对应关系;
25.构建模块,用于以集合论为指导,形成城轨车辆风险点集分级结果。
26.第三方面,本发明提供一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质用于存储计算机指令,所述计算机指令被处理器执行时,实现如上所述的城市轨道交通车辆系统风险点分级方法。
27.第四方面,本发明提供一种计算机程序产品,包括计算机程序,所述计算机程序当在一个或多个处理器上运行时,用于实现如上所述的城市轨道交通车辆系统风险点分级方法。
28.第五方面,本发明提供一种电子设备,包括:处理器、存储器以及计算机程序;其中,处理器与存储器连接,计算机程序被存储在存储器中,当电子设备运行时,所述处理器执行所述存储器存储的计算机程序,以使电子设备执行实现如上所述的城市轨道交通车辆系统风险点分级方法的指令。
29.本发明有益效果:从网络化运营全局角度出发,综合考虑多方面因素,实现了城轨车辆系统中风险点更准确的分级,对于提升轨道交通运营安全风险管理和保障安全高效运
营具有重要的理论和现实意义。
30.本发明附加方面的优点,将在下述的描述部分中更加明显的给出,或通过本发明的实践了解到。
附图说明
31.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
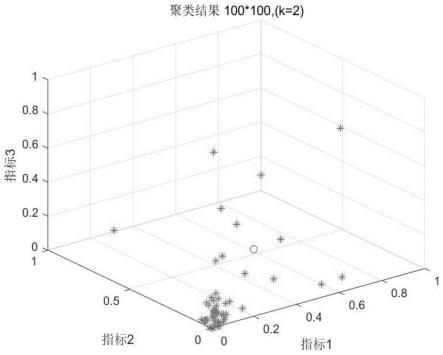
32.图1为本发明实施例所述的基于遗传算法的牵引子系统和转向架子系统最优聚类结果(k=2)示意图。
33.图2为本发明实施例所述的基于遗传算法的牵引子系统和转向架子系统最优聚类结果(k=3)示意图。
34.图3为本发明实施例所述的基于遗传算法的牵引子系统和转向架子系统最优聚类结果(k=4)示意图。
35.图4为本发明实施例所述的基于遗传算法的牵引子系统和转向架子系统最优聚类结果(k=5)示意图。
36.图5为本发明实施例所述的基于遗传算法的牵引子系统和转向架子系统最优聚类结果(k=6)示意图。
37.图6为本发明实施例所述的基于遗传算法的牵引子系统和转向架子系统最优聚类结果(k=7)示意图。
38.图7为本发明实施例所述的三类指标权重结果图。
39.图8为本发明实施例所述的三类指标权重表示图。
具体实施方式
40.下面详细叙述本发明的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过附图描述的实施方式是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
41.为便于理解本发明,下面结合附图以具体实施例对本发明作进一步解释说明,且具体实施例并不构成对本发明实施例的限定。
42.本领域技术人员应该理解,附图只是实施例的示意图,附图中的部件并不一定是实施本发明所必须的。
43.实施例1
44.本实施例1提供一种城市轨道交通车辆系统风险点分级系统,包括:
45.获取模块,用于分析获取出城轨车辆系统中的部件组成和部件的连接关系;
46.第一计算模块,用于确定部件的结构重要度指标、部件功能重要度指标和基于事故数据的关键性指标;
47.聚类模块,用于基于遗传算法的k-means++算法,确定分级数和聚类结果;
48.第二计算模块,用于应用随机森林的基尼重要性量化三类指标的权重,计算确定
聚类结果与分级级别的对应关系;
49.构建模块,用于以集合论为指导,形成城轨车辆风险点集分级结果。
50.本实施例1中,利用上述的系统实现了城市轨道交通车辆系统风险点分级方法,包括:
51.分析获取出城轨车辆系统中的部件组成和部件的连接关系;
52.确定部件的结构重要度指标、部件功能重要度指标和基于事故数据的关键性指标;
53.基于遗传算法的k-means++算法,确定分级数和聚类结果;
54.应用随机森林的基尼重要性量化三类指标的权重,计算确定聚类结果与分级级别的对应关系;
55.以集合论为指导,形成城轨车辆风险点集分级结果。
56.其中,总结城轨车辆系统的子系统主要构成和工作原理,将城轨车辆系统主要分为车体及内装、辅助供电、列车控制、牵引、制动、转向架六个子系统;在分析各子系统的部件组成时,规定最小的维修单元为部件;分析归纳部件间的连接关系,将部件间的连接关系划分为机械连接、电气连接和信息连接三种形式。
57.确定部件的结构重要度指标、部件功能重要度和基于事故数据的关键性指标,包括:
58.在leaderrank算法的基础上,引入综合考虑部件功能依赖度和部件可靠度来描述部件功能重要度评估指标;
59.引入拟拉普拉斯中心度来衡量部件的结构重要度,拟拉普拉斯中心度方法综合考虑了节点自身的重要性和其邻居的重要性,基于对移除节点引起的拟拉普拉斯能量的变化,得到部件的结构重要度;
60.将城轨车辆系统的部件看作关键词,以马尔可夫状态转移模型与词图结合,融合tf-idf算法与textrank算法,将求解到的tf-idf值作为词图中节点的初始值,将词语在句子中的同时出现的频率作为节点转移概率,参与textrank算法的迭代,得到基于事故数据的城轨车辆部件关键性指标。
61.4、根据权利要求1所述的城市轨道交通车辆系统风险点分级方法,其特征在于,将k-means++的目标函数的倒数作为适应度函数,提出基于遗传算法的k-means++算法来得到分级数和聚类结果。
62.基于遗传算法得到的最优聚类结果作为随机森林的训练集输入,并以基尼重要性来衡量指标的权重;将三类指标的原始取值与经过遗传算法得到的最优聚类结果作为随机森林的输入,可以得到每个指标对应的基尼重要性,即各指标的权重;通过输入不同样本集的类别数值k,得到最优的k值和聚类结果;将三类指标的权重值与聚类结果结合,得到各聚类类别的平均重要度,最终获取分级结果;对比最终分级结果值,数值最大的为风险点一级,以此类推,数值最小的为风险点k级,将聚类结果与分级结果对应起来,得到城轨车辆系统风险点分级结果。
63.城轨车辆系统包括车体及内装、辅助供电、列车控制、牵引、制动和转向架六个子系统,每个子系统都有其独自的风险点集;基于每个子系统都有其独自的风险点集,以风险点分级结果为依据,在集合论的基础上构建城轨车辆系统风险点集。
64.实施例2
65.本实施例2中,提供了城市轨道交通车辆系统风险点分级方法,该方法通过确定部件的结构重要度指标计算方法、部件功能重要度计算方法和基于事故数据的关键性指标计算方法,以影响车辆运行安全的部件为风险点,确定城轨车辆系统风险点分级方法,并构建城轨车辆系统风险点集,为城轨车辆系统的风险评估开拓了新思路。
66.本实施例2中,城市轨道交通车辆系统关风险点分级方法包括以下步骤:
67.步骤1:总结城轨车辆系统的子系统主要构成和工作原理,将城轨车辆系统主要分为车体及内装、辅助供电、列车控制、牵引、制动、转向架六个子系统。在分析各子系统的部件组成时,规定最小的维修单元为部件。
68.(1)车体及内装子系统s169.车体既为乘客提供位置和安全,也为有司机室的车辆提供空间的地方。同时,底架和车顶上需要安装大量的部件和设备,车体也是连接其它设备和部件的基础。车体一般包含车顶、端墙、底架和侧墙等。车体内装是提供乘客安全舒适作用的部分,大多包含座椅、灯带、玻璃窗、立柱、侧墙板、天花板、扶手及其它辅助设施等。
70.(2)辅助供电子系统s271.辅助供电子系统协助城轨供电系统为车辆提供电力,通常从电网获得直流电压,经由辅助逆变器输入低压电,为车上的辅助设备供电,实现车辆内各种用电设备的供电功能。辅助逆变器和低压电源是辅助供电子系统中的两个组成部分,辅助逆变器将电压转变为三相交流电,为客车照明、车上空调、通风装置等车载电器供电;另一部分组成是低压电源,蓄电池储存直流电源,为列车控制系统和应急系统等供电。因此,辅助供电系统主要包含蓄电池、辅助逆变器和用电设备等构成。
72.(3)列车控制子系统s373.列车控制子系统根据车上传感器和地面设备提供的信息,控制车辆的运行速度并监控车辆的安全运行状态,是车辆系统的核心子系统,主要包含列车自动控制系统(atc)、中央控制单元等设备组成。
74.(4)牵引子系统s475.牵引子系统是车辆系统中重要的电气系统,为列车提供所需动力及制动力,通常以电能为动力来源,为列车其它电气设备提供电能,其主要由受流器、牵引电机、牵引逆变器、高速断路器等部分组成。
76.(5)制动子系统s577.制动子系统是保证列车安全、准时地完成运输任务的关键系统之一,是控制列车行驶速度或者使之停车的装置,制动子系统的制动性能直接决定着列车的制动效果。制动子系统一般包含动力制动部分、空气制动部分、制动控制部分,动力制动部分连接着牵引子系统,空气制动部分以压缩空气为制动的原动力,制动控制部分是制动子系统的核心。
78.(6)转向架子系统s679.转向架子系统通过悬挂减震系统为车辆提供缓冲作用,悬挂减震系统可以缓冲轨道中的不平顺,保持车辆的舒适平稳;转向架还拥有自导向作用,使列车沿着轨道运行;同时,转向架的驱动装置为城轨车辆供给牵引力;转向架的基础制动装置可以使列车顺利制动;而且,转向架还承载着整个车辆,将车辆的重量有效分配来完成承载作用。转向架子系
统一般包含构架、轮对组成、一系悬挂、二系悬挂等。
80.分析归纳部件间的连接关系,将部件间的连接关系划分为三种形式,机械连接分为可拆卸连接和不可拆卸连接,是使用紧固件把部件们连接起来的方式;电气连接是使用电线、电缆等方式将电能由一个部件传送至另一个部件的连接方式,是经由适当的机械作用力,将不同的导体部件固定在一起来实现的;信息连接是通过有线或者无线将信息从部件经信道传送到另一个部件,并被对方所接收,是以读取反馈信号形式的连接。
81.步骤2:确定部件的结构重要度指标计算方法、部件功能重要度计算方法和基于事故数据的关键性指标计算方法。
82.首先,确定部件的功能重要度指标计算方法,在leaderrank算法的基础上,引入综合考虑部件功能依赖度和部件可靠度来描述部件功能重要度评估指标。
[0083][0084]
其中,γ1(j)为部件vi的一阶邻居集合,c
ij
为部件对(vi,vj)的功能依赖度,lri表示部件vi在k时刻的lr值。
[0085]
其次,引入拟拉普拉斯中心度来衡量部件的结构重要度,拟拉普拉斯中心度方法综合考虑了节点自身的重要性和其邻居的重要性。节点的拟拉普拉斯中心度是通过移除其引起的拟拉普拉斯能量的变化来衡量的,节点的拟拉普拉斯中心度不仅与其自身的度相关,还与其相连的其它节点的度有关,基于对移除节点引起的拟拉普拉斯能量的变化,得到部件的结构重要度。
[0086][0087]
其中,n(vi)为节点vi的邻居节点,di为节点vi的度。
[0088]
最后,将城轨车辆系统的部件看作关键词,也就是构建的城轨车辆系统事故文本词图模型中的节点;以马尔可夫状态转移模型与词图结合,将每个句子作为窗口,当两个词语存在于同一个句子中,对应词图中节点相连的边才有意义,边的意义则是词语的共现次数。将tf-idf算法与textrank算法融合的基础上,将求解到的tf-idf值作为词图中节点的初始值,将词语在句子中的同时出现的频率作为节点转移概率,参与textrank算法的迭代,得到基于事故数据的城轨车辆部件关键性指标计算方法。
[0089][0090][0091][0092]
其中,|d|为文本的总数,|{j:li∈dj}|为包含词语li的文本数目,为了防止在文档中不存在的某些词语的情况,即分母为零,因此对分母进行加一的操作,tfi为词语wi的词频,w(i,j)指的是从节点wi到节点
[0093]
wj的边的权重,s(vi)为基于事故数据的城轨车辆部件vi的关键性指标值。
[0094]
步骤3:将k-means++的目标函数的倒数作为适应度函数,提出基于遗传算法的k-means++算法来得到分级数和聚类结果。
[0095]
所述的步骤3具体包括:
[0096]
step1:编码,将每个聚类中心作为编码,如若k取2时和数据集为3维时,每个聚类
中心为(1,4,9)、(5,3,8),则初始编码就是(1,4,9,5,3,8);
[0097]
step 2:随机产生初始种群,种群大小m,一般为20~100;交叉概率pc,一般为0.25~0.75;变异概率pm,一般取0.01~0.2;遗传代数,一般为100~500;聚类数k值,一般为(nc是数据集的大小);
[0098]
step 3:对数据进行分类,针对数据集nc为数据点的数量,采用k-means++算法选取初始的聚类中心点,更新聚类中心,计算各类中所有数据点所对应的均值为该类的聚类中心;
[0099]
step 4:设定适应度函数,适应度值的评估关系到下一代种群的优良性,是进行优胜劣汰的关键,将数据点与中心点的欧氏距离的加和的倒数作为适应度函数,每个聚类中心的数据大小为nj,(j=1,2,...k),cj为聚类中心,适应度的函数为:
[0100][0101]
step 5:选择,选取轮盘赌选择算子来进行选择,选取适应度较大的个体,设群体大小为m,个体的适应度函数取值为fm,则其被选择的概率为:
[0102][0103]
step 6:交叉,采用单点交叉,将群体平均分为两两一组,对于每一组个体,利用随机函数设置交叉点,根据交叉概率在交叉点互换部分基因形成新个体并计算适应度函数值,与对应的父代的适应度比较,选择适应度较大的两个染色体保存下来;
[0104]
step 7:变异,采用均匀变异算子来完成操作,以聚类中心为基本单位进行变异,将聚类中心设为变异点,以变异概率随机选择新的样本代替原样本作为聚类中心;
[0105]
step 8:调整交叉和变异的概率,为了减少固定概率对聚类结果的影响,采用自适应算子进行动态调整,在进行交叉和变异时,适应度较高的概率较小,而适应度较低的概率较高,使得适应度较高的更容易被保留和遗传,适应度低的更容易得到进化,从而产生优良模式,因此,p
c1
=0.9,
[0106]
p
c2
=0.6,p
m1
=0.5,p
m2
=0.1,交叉概率pc和变异概率pm为:
[0107][0108][0109]
其中,f
ave
为每代群体中所有个体的平均适应度,f
max
为群体中个体最大的适应度,f
′
为交叉的两个个体中较大的适应度,f是要变异的个体适应度。
[0110]
step 9:循环终止,设定迭代次数t和阈值ε,当迭代次数到达t或者小于阈值ε时就结束算法,得到最优的聚类结果。
[0111]
聚类的目标是为了簇内距离最小且簇间距离最大,通过输入不同的k值和对每个k值各进行100次实验,选出每个k值下最好的适应度曲线对应的最优聚类结果。计算每个k值下的簇内距离和簇间距离,将100次的实验中的簇内距离和簇间距离分别取平均值,通过比较不同k值的平均值,确定簇内距离平均值最小且簇间距离平均值最大下的k值,即为最优
的分级数目。
[0112]
步骤4:基于遗传算法得到的最优聚类结果作为随机森林的训练集输入,并以基尼重要性来衡量指标的权重。基尼的重要性是依据基尼指数进行计算,记为
[0113][0114][0115][0116][0117]
其中,k为样本集的类别数,p
ok
为节点o样本属于第k类样本的概率值,为变量xj在节点o分裂前后的gini值变化量,gio为节点o处的gini指数值;gi
l
,gir为节点o分裂后子节点的gini指数值,为变量xj在第i棵树中出现o次的重要性;n
tr
为分类树的数量。
[0118]
将三类指标的原始取值与经过遗传算法得到的最优聚类结果作为随机森林的输入,可以得到每个指标对应的基尼重要性,即各指标的权重wq。通过输入不同k值,可以得到最优的k值和聚类结果。但对于聚类结果并不等于分级结果,需要对聚类得到的结果进行处理,将三类指标的权重值与聚类结果结合,得到各聚类类别的平均重要度,最终获取分级结果。
[0119][0120]
其中,wq为三类指标的权重,q=1,2,3,x
iq
为聚类级别中第i级别中所含的风险点中第q个的指标的值;s为聚类级别中第i级中所含的风险点总数。
[0121]
对比fi值,数值最大的为风险点一级,以此类推,数值最小的为风险点k级,通过fi将聚类结果与分级结果对应起来,得到城轨车辆系统风险点分级结果。
[0122]
步骤5:城轨车辆系统也是由车体及内装、辅助供电、列车控制、牵引、制动和转向架六个子系统构成的,针对每个子系统来说,都有其独自的风险点集,可以表示如下:
[0123]rv
={r1,r2,r3,r4,r5,r6}
ꢀꢀꢀꢀꢀꢀꢀ
(15)
[0124][0125][0126][0127][0128][0129][0130]
其中,r1,r2,r3,r4,r5,r6分别为城轨车辆各子系统风险点集合,为城轨车辆第k个子系统中第i个风险点,ni表示为第k个子系统中风险点的数量。
[0131]
在车辆系统中,并不是所有的部件都是风险点,有些部件的失效不会影响到车辆系统的安全状态,例如车上空调、侧墙板等部件。因此,在研究车辆系统风险时,需要梳理出与安全相关的部件,将这些部件称为车辆系统中的风险点。因此,对于每个风险点来说,都有属于自己的集合表示。针对上述对集合论的基本概念和性质的描述,以风险点分级结果为依据,在集合论的基础上构建城轨车辆系统风险点集。
[0132][0133]
其中,fr为第k个子系统第i个风险点的分级级别;nk为子系统内风险点的数量。
[0134]
综上,本实施例提供的风险点分级方法,从网络化运营全局角度出发,提出城轨车辆系统中风险点分级方法,对于提升轨道交通运营安全风险管理和保障安全高效运营具有重要的理论和现实意义。
[0135]
实施例3
[0136]
本实施例3中,以某城轨车辆为例,具体阐述了城市轨道交通车辆系统风险点分级方法,该方法包括如下步骤:
[0137]
步骤1:总结城轨车辆系统的子系统主要构成和工作原理,将城轨车辆系统主要分为车体及内装、辅助供电、列车控制、牵引、制动、转向架六个子系统。在分析各子系统的部件组成时,规定最小的维修单元为部件。通过与制造设计工程师、运营单位车辆安全负责人和维修工程师的探讨,结合各运营单位的车辆系统风险清单,以每个子系统的最小维护单元作为部件,梳理出中影响车辆系统运行安全的主要部件,如表1所示,s1,s2,s3,s4,s5,s6分别代表城轨车辆车体及内装子系统、辅助供电子系统、列车控制子系统、牵引子系统、制动子系统、转向架子系统。研究车辆部件间的连接关系,通过对车辆设计制造企业的调研,分析归纳部件间的连接关系,将部件间的连接关系划分为三种形式,机械连接、电气连接和信息连接。
[0138]
表3城轨车辆系统运行安全的主要部件
[0139]
[0140]
[0141][0142]
步骤2:确定部件的结构重要度指标计算方法、部件功能重要度计算方法和基于事故数据的关键性指标计算方法。
[0143]
首先,确定部件的功能重要度指标计算方法,在leaderrank算法的基础上,引入综合考虑部件功能依赖度和部件可靠度来描述部件功能重要度评估指标。
[0144][0145]
其中,γ1(j)为部件vi的一阶邻居集合,c
ij
为部件对(vi,vj)的功能依赖度,lri表示部件vi在k时刻的lr值。
[0146]
其次,引入拟拉普拉斯中心度来衡量部件的结构重要度,拟拉普拉斯中心度方法综合考虑了节点自身的重要性和其邻居的重要性。节点的拟拉普拉斯中心度是通过移除其引起的拟拉普拉斯能量的变化来衡量的,节点的拟拉普拉斯中心度不仅与其自身的度相关,还与其相连的其它节点的度有关,基于对移除节点引起的拟拉普拉斯能量的变化,得到部件的结构重要度。
[0147][0148]
其中,n(vi)为节点vi的邻居节点,di为节点vi的度。
[0149]
最后,将城轨车辆系统的部件看作关键词,也就是构建的城轨车辆系统事故文本词图模型中的节点;以马尔可夫状态转移模型与词图结合,将每个句子作为窗口,当两个词语存在于同一个句子中,对应词图中节点相连的边才有意义,边的意义则是词语的共现次数。将tf-idf算法与textrank算法融合的基础上,将求解到的tf-idf值作为词图中节点的初始值,将词语在句子中的同时出现的频率作为节点转移概率,参与textrank算法的迭代,得到基于事故数据的城轨车辆部件关键性指标计算方法。
[0150][0151][0152][0153]
其中,|d|为文本的总数,|{j:li∈dj}|为包含词语li的文本数目,为了防止在文档中不存在的某些词语的情况,即分母为零,因此对分母进行加一的操作,tfi为词语wi的词频,w(i,j)指的是从节点wi到节点wj的边的权重,s(vi)为基于事故数据的城轨车辆部件vi的关键性指标值。
[0154]
根据表1,归纳提取对牵引子系统和转向架子系统中的部件,为了便于描述,将部件进行编号,v1至v
25
为牵引子系统的节点,v
26
至v
61
为转向架子系统的节点,如表2所示。
[0155]
表3牵引子系统和转向架子系统拓扑网络节点列表
[0156][0157]
通过计算得到的牵引子系统和转向架子系统的部件结构重要度、功能重要度和基于事故数据的关键性三类指标,归一化数值如表3所示。
[0158]
表4各部件的三类指标归一化值
[0159]
[0160][0161]
步骤3:将k-means++的目标函数的倒数作为适应度函数,提出基于遗传算法的k-means++算法来得到分级数和聚类结果。
[0162]
优先地,所述的步骤3包括:
[0163]
step1:编码,将每个聚类中心作为编码,如若k取2时和数据集为3维时,每个聚类中心为(1,4,9)、(5,3,8),则初始编码就是(1,4,9,5,3,8);
[0164]
step 2:随机产生初始种群,种群大小m,一般为20~100;交叉概率pc,一般为0.25~0.75;变异概率pm,一般取0.01~0.2;遗传代数,一般为100~500;聚类数k值,一般为(nc是数据集的大小);
[0165]
step 3:对数据进行分类,针对数据集nc为数据点的数量,采用k-means++算法选取初始的聚类中心点,更新聚类中心,计算各类中所有数据点所对应的均值为该类的聚类中心;
[0166]
step 4:设定适应度函数,适应度值的评估关系到下一代种群的优良性,是进行优胜劣汰的关键,将数据点与中心点的欧氏距离的加和的倒数作为适应度函数,每个聚类中心的数据大小为nj,(j=1,2,...k),适应度的函数为:
[0167][0168]
step 5:选择,选取轮盘赌选择算子来进行选择,选取适应度较大的个体,设群体大小为m,个体的适应度函数取值为fm,则其被选择的概率为:
[0169][0170]
step 6:交叉,采用单点交叉,将群体平均分为两两一组,对于每一组个体,利用随机函数设置交叉点,根据交叉概率在交叉点互换部分基因形成新个体并计算适应度函数值,与对应的父代的适应度比较,选择适应度较大的两个染色体保存下来;
[0171]
step 7:变异,采用均匀变异算子来完成操作,以聚类中心为基本单位进行变异,将聚类中心设为变异点,以变异概率随机选择新的样本代替原样本作为聚类中心;
[0172]
step 8:调整交叉和变异的概率,为了减少固定概率对聚类结果的影响,采用自适应算子进行动态调整,在进行交叉和变异时,适应度较高的概率较小,而适应度较低的概率较高,使得适应度较高的更容易被保留和遗传,适应度低的更容易得到进化,从而产生优良模式,因此,p
c1
=0.9,p
c2
=0.6,p
m1
=0.5,p
m2
=0.1,交叉概率pc和变异概率pm为:
[0173][0174][0175]
其中,f
ave
为每代群体中所有个体的平均适应度,f
max
为群体中个体最大的适应度,f
′
为交叉的两个个体中较大的适应度,f是要变异的个体适应度。
[0176]
step 9:循环终止,设定迭代次数t和阈值ε,当迭代次数到达t或者小于阈值ε时就结束算法,得到最优的聚类结果。
[0177]
聚类的目标是为了簇内距离最小且簇间距离最大,通过输入不同的k值和对每个k值各进行100次实验,选出每个k值下最好的适应度曲线对应的最优聚类结果。计算每个k值下的簇内距离和簇间距离,将100次的实验中的簇内距离和簇间距离分别取平均值,通过比较不同k值的平均值,确定簇内距离平均值最小且簇间距离平均值最大下的k值,即为最优的分级数目。
[0178]
牵引子系统和转向架子系统中的与安全相关的部件为风险点ri,即为牵引子系统和转向架子系统拓扑网络中的节点。利用基于遗传算法的聚类算法确定分级数和聚类结果。设定种群大小m=100,迭代次数t=100,聚类数k值为[2,7],对同一指标数据集,针对每个k值分别进行100次实验,比较得出最优的适应度曲线下的聚类结果,即为此k值对应的最优聚类结果,如图1至6所示,图指标1对应的节点功能重要度指标,指标2对应的是节点结构重要度指标,指标3对应的是基于事故数据的节点关键性指标(图中圆圈对应的聚类中心,星号对应的是节点,不同颜色的星号表示数据点属于不同的聚类类别)。
[0179]
将每个k值都进行100次实验,通过比较每个k值下的聚类目标平均值,结果如表4所示,发现当k=4时,簇内距离最小且簇间距离最大,因此,选择k=4作为最佳分级数,经过100次实验中的最优适应度函数下的为最优聚类结果。
[0180]
表5各分级数的聚类目标平均值结果
[0181][0182]
步骤4:基于遗传算法得到的最优聚类结果作为随机森林的训练集输入,并以基尼
重要性来衡量指标的权重。基尼的重要性是依据基尼指数进行计算,记为
[0183][0184][0185][0186][0187]
其中,k为样本集的类别数,p
ok
为节点o样本属于第k类样本的概率值,为变量xj在节点o分裂前后的gini值变化量,gio为节点o处的gini指数值;gi
l
,gir为节点o分裂后子节点的gini指数值,为变量xj在第i棵树中出现o次的重要性;n
tr
为分类树的数量。
[0188]
将三类指标的原始取值与经过遗传算法得到的最优聚类结果作为随机森林的输入,可以得到每个指标对应的基尼重要性,即各指标的权重wq。通过输入不同k值,可以得到最优的k值和聚类结果。但对于聚类结果并不等于分级结果,需要对聚类得到的结果进行处理,将三类指标的权重值与聚类结果结合,得到各聚类类别的平均重要度,最终获取分级结果。
[0189][0190]
其中,wq为三类指标的权重,q=1,2,3,x
iq
为聚类级别中第i级别中所含的风险点中第q个的指标的值;s为聚类级别中第i级中所含的风险点总数。
[0191]
对比fi值,数值最大的为风险点一级,以此类推,数值最小的为风险点k级,通过fi将聚类结果与分级结果对应起来,得到城轨车辆系统风险点分级结果。
[0192]
为了准确的刻画出牵引子系统和转向架子系统中风险点的重要程度,将得到的聚类结果作为随机森林的输入来获取各类指标的权重,结果见图7和图8所示,可以看出三类指标权重大小区别不大,功能重要度指标对聚类类别的影响是最大的,其次是结构重要度指标。
[0193]
依据从随机森林基尼重要性得到的三类指标的权重,将其与从遗传算法中得到的聚类结果结合,分别得到不同聚类类别中所有风险点对应的权重与指标值的和的平均数,即各聚类类别中所有节点的平均重要度,如表5所示。
[0194]
表6聚类级别平均值
[0195][0196]
从fi(i=1,2,3,4)中最大值为风险点一级,其次为风险点二级,以此类推,最后可以得到牵引子系统的风险点分级。由表5可以得到在牵引子系统和转向架子系统中,聚类级别f2对应风险级别一级,聚类级别f1对应风险级别二级,聚类级别f4对应风险级别三级,聚
类级别f3对应风险级别四级。
[0197]
步骤5:城轨车辆系统也是由车体及内装、辅助供电、列车控制、牵引、制动和转向架六个子系统构成的,针对每个子系统来说,都有其独自的风险点集,可以表示如下:
[0198]rv
={r1,r2,r3,r4,r5,r6}
ꢀꢀꢀꢀꢀꢀꢀ
(36)
[0199][0200][0201][0202][0203][0204][0205]
其中,r1,r2,r3,r4,r5,r6分别为城轨车辆各子系统风险点集合,为城轨车辆第k个子系统中第i个风险点。
[0206]
在车辆系统中,并不是所有的部件都是风险点,有些部件的失效不会影响到车辆系统的安全状态,例如车上空调、侧墙板等部件。因此,在研究车辆系统风险时,需要梳理出与安全相关的部件,将这些部件称为车辆系统中的风险点。因此,对于每个风险点来说,都有属于自己的集合表示。针对上述对集合论的基本概念和性质的描述,以风险点分级结果为依据,在集合论的基础上构建城轨车辆系统风险点集。
[0207][0208]
其中,fr为第k个子系统第i个风险点的分级级别;nk为子系统内风险点的数量。
[0209]
依据牵引子系统和转向架子系统中风险点分级结果,最终的风险点集r4∪r6,见表6所示。
[0210]
表7牵引子系统和转向架子系统风险点集
[0211][0212][0213]
风险等级越小,说明风险点越重要,由牵引子系统和转向架子系统的风险点集可知,风险点分级ⅰ级中,主断路器、储油柜、司机控制器和温度传感器是最重要的风险点,其次是牵引控制单元、牵引电机、齿轮箱吊杆、构架、联系枕梁组成和二系横向减振器为次要的风险点,而风险点分级ⅲ级和ⅳ级中的风险点数量相较于前两级更多。
[0214]
实施例4
[0215]
本发明实施例4提供一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质用于存储计算机指令,所述计算机指令被处理器执行时,实现城市轨道交通车辆系统风险点分级方法。
[0216]
实施例5
[0217]
本发明实施例5提供一种计算机程序(产品),包括计算机程序,所述计算机程序当在一个或多个处理器上运行时,用于实现城市轨道交通车辆系统风险点分级方法。
[0218]
实施例6
[0219]
本发明实施例6提供一种电子设备,包括:处理器、存储器以及计算机程序;其中,
处理器与存储器连接,计算机程序被存储在存储器中,当电子设备运行时,所述处理器执行所述存储器存储的计算机程序,以使电子设备执行实现城市轨道交通车辆系统风险点分级方法的指令。
[0220]
上述虽然结合附图对本发明的具体实施方式进行了描述,但并非对本发明保护范围的限制,所属领域技术人员应该明白,在本发明公开的技术方案的基础上,本领域技术人员在不需要付出创造性劳动即可做出的各种修改或变形,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1