目标跟踪方法、装置、电子设备及存储介质与流程
本技术涉及自动驾驶,尤其涉及一种目标跟踪方法、装置、电子设备及存储介质。
背景技术:
1、视频目标跟踪技术是智能网联汽车驾驶技术中的重要组成部分。通过视频目标跟踪技术,智能网联驾驶汽车可以对周围目标的位置和行为进行预测,并且可以基于目标跟踪的结果进行适当的决策。
2、目前的视频目标跟踪算法分为基于相关滤波的视频目标跟踪算法和基于深度学习的视频目标跟踪算法。
3、基于相关滤波的视频目标跟踪算法主要利用相关滤波器计算模板图像和预测图像之间的相似度来确定目标位置。其发展较为成熟,具有速度快的优点,但是该类算法通常采用手工浅层特征,因此鲁棒性较差、精度较低。基于深度学习的视频目标跟踪算法主要是通过训练深层网络来学习目标特征,完成视频目标跟踪。基于深度学习的视频目标跟踪算法中已经产生了一些性能优异的算法模型,例如全卷积孪生网络(fully-convolutionalsiamese networks,siamfc)算法。siamfc算法将孪生网络引入到视频目标跟踪领域,把视频目标跟踪问题转化为图像匹配问题,通过选择与模板图像最相似的候选图像实现对目标的跟踪。该类算法虽然具有实时的跟踪速度,但其并不能较好地处理目标变化问题,比如在所跟踪的目标发生突然换道行为或转向拐弯等情况下容易丢失目标,导致其跟踪精度并不理想。
技术实现思路
1、针对现有技术存在的问题,本技术实施例提供一种目标跟踪方法、装置、电子设备及存储介质。
2、第一方面,本技术实施例提供一种目标跟踪方法,包括:
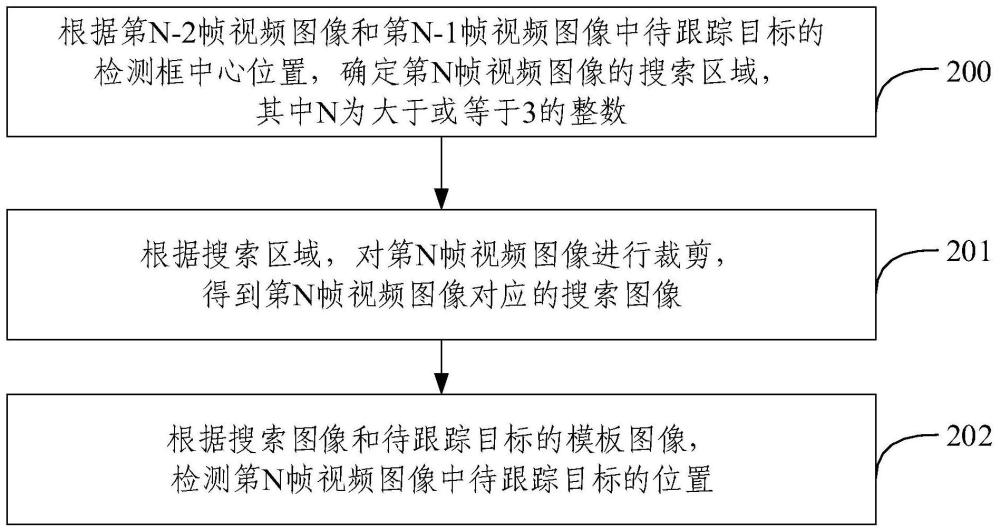
3、根据第n-2帧视频图像和第n-1帧视频图像中待跟踪目标的检测框中心位置,确定第n帧视频图像的搜索区域,其中n为大于或等于3的整数;
4、根据所述搜索区域,对所述第n帧视频图像进行裁剪,得到所述第n帧视频图像对应的搜索图像;
5、根据所述搜索图像和所述待跟踪目标的模板图像,检测所述第n帧视频图像中所述待跟踪目标的位置。
6、可选地,所述根据第n-2帧视频图像和第n-1帧视频图像中待跟踪目标的检测框中心位置,确定第n帧视频图像的搜索区域,包括:
7、根据第n-2帧视频图像中待跟踪目标的检测框中心位置与第n-1帧视频图像中待跟踪目标的检测框中心位置之间的横坐标变化量以及纵坐标变化量,对第n-1帧视频图像的搜索区域中心位置进行调整,并将调整后的搜索区域中心位置作为第n帧视频图像的搜索区域中心位置。
8、可选地,所述根据第n-2帧视频图像中待跟踪目标的检测框中心位置与第n-1帧视频图像中待跟踪目标的检测框中心位置之间的横坐标变化量以及纵坐标变化量,对第n-1帧视频图像的搜索区域中心位置进行调整,包括:
9、在所述纵坐标变化量大于所述横坐标变化量,且所述纵坐标变化量大于或等于预设阈值的情况下,对第n-1帧视频图像的搜索区域中心位置的纵坐标进行调整,确定第n帧视频图像的搜索区域中心位置的纵坐标;或者,
10、在所述横坐标变化量大于所述纵坐标变化量,且所述横坐标变化量大于或等于预设阈值的情况下,对第n-1帧视频图像的搜索区域中心位置的横坐标进行调整,确定第n帧视频图像的搜索区域中心位置的横坐标。
11、可选地,所述对第n-1帧视频图像的搜索区域中心位置的纵坐标进行调整,包括:
12、在第n-2帧视频图像中待跟踪目标的检测框中心位置的纵坐标小于第n-1帧视频图像中待跟踪目标的检测框中心位置的纵坐标的情况下,将第n-1帧视频图像的搜索区域中心位置的纵坐标乘以5/3;或者,
13、在第n-2帧视频图像中待跟踪目标的检测框中心位置的纵坐标大于第n-1帧视频图像中待跟踪目标的检测框中心位置的纵坐标的情况下,将第n-1帧视频图像的搜索区域中心位置的纵坐标乘以1/3。
14、可选地,所述对第n-1帧视频图像的搜索区域中心位置的横坐标进行调整,包括:
15、在第n-2帧视频图像中待跟踪目标的检测框中心位置的横坐标小于第n-1帧视频图像中待跟踪目标的检测框中心位置的横坐标的情况下,将第n-1帧视频图像的搜索区域中心位置的横坐标乘以5/3;或者,
16、在第n-2帧视频图像中待跟踪目标的检测框中心位置的横坐标大于第n-1帧视频图像中待跟踪目标的检测框中心位置的横坐标的情况下,将第n-1帧视频图像的搜索区域中心位置的横坐标乘以1/3。
17、可选地,所述根据所述搜索图像和所述待跟踪目标的模板图像,检测所述第n帧视频图像中所述待跟踪目标的位置,包括:
18、根据所述搜索图像、所述待跟踪目标的模板图像和孪生网络模型,检测所述第n帧视频图像中所述待跟踪目标的位置;
19、其中,所述孪生网络模型基于以下损失函数训练得到:
20、
21、式中,l表示损失函数的值,yij表示实际标签矩阵y的第i行第j列元素,vij表示层归一化矩阵v的第i行第j列元素,层归一化矩阵v的行数和列数分别为m和n。
22、第二方面,本技术实施例还提供一种电子设备,包括存储器,收发机,处理器:
23、存储器,用于存储计算机程序;收发机,用于在所述处理器的控制下收发数据;处理器,用于读取所述存储器中的计算机程序并执行以下操作:
24、根据第n-2帧视频图像和第n-1帧视频图像中待跟踪目标的检测框中心位置,确定第n帧视频图像的搜索区域,其中n为大于或等于3的整数;
25、根据所述搜索区域,对所述第n帧视频图像进行裁剪,得到所述第n帧视频图像对应的搜索图像;
26、根据所述搜索图像和所述待跟踪目标的模板图像,检测所述第n帧视频图像中所述待跟踪目标的位置。
27、可选地,所述根据第n-2帧视频图像和第n-1帧视频图像中待跟踪目标的检测框中心位置,确定第n帧视频图像的搜索区域,包括:
28、根据第n-2帧视频图像中待跟踪目标的检测框中心位置与第n-1帧视频图像中待跟踪目标的检测框中心位置之间的横坐标变化量以及纵坐标变化量,对第n-1帧视频图像的搜索区域中心位置进行调整,并将调整后的搜索区域中心位置作为第n帧视频图像的搜索区域中心位置。
29、可选地,所述根据第n-2帧视频图像中待跟踪目标的检测框中心位置与第n-1帧视频图像中待跟踪目标的检测框中心位置之间的横坐标变化量以及纵坐标变化量,对第n-1帧视频图像的搜索区域中心位置进行调整,包括:
30、在所述纵坐标变化量大于所述横坐标变化量,且所述纵坐标变化量大于或等于预设阈值的情况下,对第n-1帧视频图像的搜索区域中心位置的纵坐标进行调整,确定第n帧视频图像的搜索区域中心位置的纵坐标;或者,
31、在所述横坐标变化量大于所述纵坐标变化量,且所述横坐标变化量大于或等于预设阈值的情况下,对第n-1帧视频图像的搜索区域中心位置的横坐标进行调整,确定第n帧视频图像的搜索区域中心位置的横坐标。
32、可选地,所述对第n-1帧视频图像的搜索区域中心位置的纵坐标进行调整,包括:
33、在第n-2帧视频图像中待跟踪目标的检测框中心位置的纵坐标小于第n-1帧视频图像中待跟踪目标的检测框中心位置的纵坐标的情况下,将第n-1帧视频图像的搜索区域中心位置的纵坐标乘以5/3;或者,
34、在第n-2帧视频图像中待跟踪目标的检测框中心位置的纵坐标大于第n-1帧视频图像中待跟踪目标的检测框中心位置的纵坐标的情况下,将第n-1帧视频图像的搜索区域中心位置的纵坐标乘以1/3。
35、可选地,所述对第n-1帧视频图像的搜索区域中心位置的横坐标进行调整,包括:
36、在第n-2帧视频图像中待跟踪目标的检测框中心位置的横坐标小于第n-1帧视频图像中待跟踪目标的检测框中心位置的横坐标的情况下,将第n-1帧视频图像的搜索区域中心位置的横坐标乘以5/3;或者,
37、在第n-2帧视频图像中待跟踪目标的检测框中心位置的横坐标大于第n-1帧视频图像中待跟踪目标的检测框中心位置的横坐标的情况下,将第n-1帧视频图像的搜索区域中心位置的横坐标乘以1/3。
38、可选地,所述根据所述搜索图像和所述待跟踪目标的模板图像,检测所述第n帧视频图像中所述待跟踪目标的位置,包括:
39、根据所述搜索图像、所述待跟踪目标的模板图像和孪生网络模型,检测所述第n帧视频图像中所述待跟踪目标的位置;
40、其中,所述孪生网络模型基于以下损失函数训练得到:
41、
42、式中,l表示损失函数的值,yij表示实际标签矩阵y的第i行第j列元素,vij表示层归一化矩阵v的第i行第j列元素,层归一化矩阵v的行数和列数分别为m和n。
43、第三方面,本技术实施例还提供一种目标跟踪装置,包括:
44、确定单元,用于根据第n-2帧视频图像和第n-1帧视频图像中待跟踪目标的检测框中心位置,确定第n帧视频图像的搜索区域,其中n为大于或等于3的整数;
45、裁剪单元,用于根据所述搜索区域,对所述第n帧视频图像进行裁剪,得到所述第n帧视频图像对应的搜索图像;
46、检测单元,用于根据所述搜索图像和所述待跟踪目标的模板图像,检测所述第n帧视频图像中所述待跟踪目标的位置。
47、第四方面,本技术实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序用于使计算机执行如上所述第一方面所述的目标跟踪方法。
48、第五方面,本技术实施例还提供一种通信设备,所述通信设备中存储有计算机程序,所述计算机程序用于使通信设备执行如上所述第一方面所述的目标跟踪方法。
49、第六方面,本技术实施例还提供一种处理器可读存储介质,所述处理器可读存储介质存储有计算机程序,所述计算机程序用于使处理器执行如上所述第一方面所述的目标跟踪方法。
50、第七方面,本技术实施例还提供一种芯片产品,所述芯片产品中存储有计算机程序,所述计算机程序用于使芯片产品执行如上所述第一方面所述的目标跟踪方法。
51、本技术实施例提供的目标跟踪方法、装置、电子设备及存储介质,通过根据第n-2帧视频图像和第n-1帧视频图像中待跟踪目标的检测框中心位置来确定第n帧视频图像的搜索区域,可以更加精准地确定第n帧视频图像的搜索区域,从而能够更好地处理目标变化问题,即使在跟踪目标突然换道或转向拐弯的情况下也不容易跟丢目标。
- 还没有人留言评论。精彩留言会获得点赞!