一种地球同步轨道目标成像卫星巡视任务规划方法与流程
本发明属于太空态势感知空间目标监视成像,特别涉及一种地球同步轨道空间目标监视成像卫星漂移巡视任务规划方法。
背景技术:
0、技术背景
1、漂移巡视是地球同步轨道空间目标监视成像卫星最常用的任务模式之一,卫星轨道位于目标轨道下方,轨道高度差形成卫星与目标的漂移率差,卫星在从目标下方漂过时对目标完成监视成像,卫星通常利用百余天对控守区域内多个目标完成漂移巡视,是一种常用的普查手段。成像时卫星必须处于顺光状态,即卫星至目标的矢量与太阳光矢量夹角应尽量小,以确保成像质量。卫星在漂移巡视时,需要针对目标专门调整轨道高度,目的之一是为了调整抵近成像距离,目的之二是通过选择合适的轨道高度调整时机,保证卫星运动至抵近成像位置时刚好处于顺光状态。
2、目前地球同步轨道空间目标监视成像卫星漂移巡视轨道高度调整采用霍尔曼变轨方式,通过两次轨道机动将卫星圆轨道高度抬高,这种方式具有如下局限性:①推进剂消耗量大,机动次数多,抵近和撤离共需要4次机动;②隐蔽性、时效性和效率差,由于机动次数多,通常需要至少提前1天开始轨道高度调整,意图易被对方提前识别且时效性差;③任务灵活性差,观测方向单一,卫星在途经目标正下方时距离最近,因此一般只能观测目标对地方向,无法观测目标其他方向,无法满足灵活多样的观测需求和情报需求;④卫星在轨需要保持较小的轨道倾角,以适应对目标的观测需求,南北位保的推进剂需求较大,制约卫星在轨机动能力和巡视效能。
技术实现思路
1、本发明解决的技术问题是:传统空间目标监视成像卫星采用调节圆轨道高度的漂移巡视任务规划方法,针对其中存在的卫星推进剂消耗量大、巡视隐蔽性、时效性及效率差、任务灵活性差等制约巡视效能的突出问题,提出一种基于调整半长轴的卫星漂移巡视任务规划方法。
2、本发明的技术方案为:
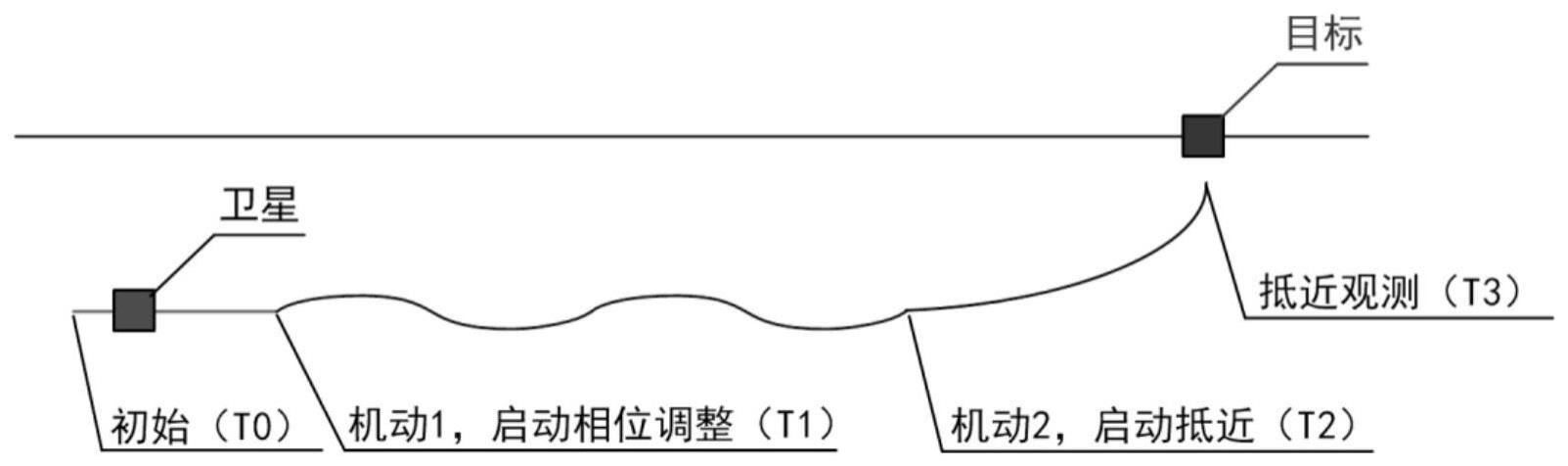
3、一种地球同步轨道空间目标监视成像卫星漂移巡视任务规划方法,主要通过控制观测卫星使其通过两次机动变轨运动至抵近观测位置,具体为:
4、首先,根据任务需求确定观测卫星巡视任务的初始时间t0及相应的初始位置,并确定抵近观测时刻t3及相应的抵近观测位置根据抵近观测时刻t3迭代优化确定第二次机动时刻t2,进而确定第一次机动时刻t1;
5、在第一次机动时刻t1,观测卫星运动至第一次机动位置对此处的初始速度矢量施加第一速度增量δv1使得观测卫星沿轨道切向进行机动得到第一次机动后的速度矢量在第二次机动时刻t2,观测卫星运动至第二次机动位置对此处的初始速度矢量施加第二速度增量δv2使得观测卫星沿轨道切向进行机动得到第二次机动后速度矢量在抵近观测时刻t3,观测卫星处于抵近观测位置并以观测矢量对目标卫星进行观测。
6、进一步的,所述的抵近观测时刻t3及相应的抵近观测位置通过以下方式确定:
7、观测卫星与目标卫星共轨道面时,在地球惯性坐标系下从北向南看去,地球自转方向、太阳绕地球转动方向、卫星和模板绕地球转动方向均为逆时针方向,以观测卫星能够顺光观测的时刻作为抵近观测时刻t3;
8、观测卫星与目标卫星为异面时,计算目标穿过观测卫星轨道面的时间,以此作为抵近观测时刻t3;
9、根据抵近观测时刻t3进而确定相对应的抵近观测位置
10、进一步的,确定观测卫星处于抵近观测位置时对目标卫星的所述观测矢量包括:
11、首先,根据目标卫星的轨道根数在地球惯性坐标系下求解t3时刻目标卫星的位置矢量
12、
13、其中,ab为半长轴、eb为偏心率、ib为倾角、ωb为升交点赤经、ωb为近地点幅角、fb为真近点角;
14、然后,确定t3时刻观测卫星对目标卫星的观测矢量
15、
16、其中,为地球惯性坐标系下t3时刻观测卫星对目标卫星的观测矢量。
17、进一步的,所述确定第一次机动时刻t1,具体包括:
18、首先,指定第一次机动时刻t1的优化初值为t1_0,第二次机动时刻t2的优化初值为t2_0;
19、选择初值t2_0=t3-12h;
20、在t2_0基础上确定t1_0:如果t2_0与t0的时间差的非整天部分大于12h,则t1_0=t2_0-n·24h+12h;如果t2_0与t0的时间差的非整天部分小于等于12h,则t1_0=t2_0-n·24h;其中n为非零整数,代表两次机动之间的整天部分,n的取值应保证t1_0与t0的时间差≤24h。
21、进一步的,所述对初始速度矢量施加第一次机动速度增量δv1使得观测卫星沿轨道切向进行机动得到第一次机动后速度矢量具体包括:
22、首先,在地球惯性坐标系下求解观测卫星运动到第一次机动位置处初始的位置矢量和速度矢量
23、
24、
25、
26、观测卫星运动至第一次机动位置进行第一次机动之前的轨道根数:半长轴为a1_0、偏心率e1_0、倾角i1_0、升交点赤经ω1_0、近地点幅角ω1_0和真近点角f1_0;t为时间变量。
27、进一步的,所述对初始速度矢量施加第二速度增量δv2使得观测卫星沿轨道切向进行机动得到第二次机动后速度矢量具体包括:
28、在地球惯性坐标系下求解观测卫星运动到第二次机动位置处初始的位置矢量和速度矢量
29、
30、
31、
32、其中,δv2为标量,正为沿切线方向,负为沿切线方向反向;δv2的初值取0m/s;
33、观测卫星运动到第二次机动位置处的初始轨道根数:半长轴a2_0、偏心率e2_0、倾角i2_0、升交点赤经ω2_0、近地点幅角ω2_0和真近点角f2_0;
34、然后,根据第二次机动后的轨道周期进一步优化计算t1、t2:
35、δt为第二次机动后的轨道周期;
36、如果t2与t0的时间差的非整天部分小于等于12h,则令t1=t2-n·24h,其中n为非零整数,代表两次机动之间的整天部分,n的取值尽量大,以保证t1与t0的时间差小于等于24h;
37、如果t2与t0的时间差的非整天部分大于12h,责令t1=t2-n·24h+12h,其中n为非零整数,n的取值应保证t1与t0的时间差小于等于24h。
38、进一步的,所述观测卫星处于抵近观测位置处的位置矢量表示为:
39、
40、观测卫星运动至抵近观测位置的轨道根数:半长轴a3、偏心率e3、倾角i3、升交点赤经ω3、近地点幅角ω3和真近点角f3。
41、进一步的,所述的第一速度增量δv1和第二速度增量δv2通过迭代优化的方式获得,包括:
42、首先根据第二次机动后的轨道参数对第二次机动速度增量δv2进行第一轮迭代优化;包括:
43、以re为geo轨道半径,为地球惯性坐标系下t3时刻观测卫星对目标卫星的观测矢量,观测卫星于第二次机动位置第二次机动后轨道根数为半长轴a2,偏心率e2,
44、若则正向增大δv2,或负向减小δv2;
45、若则负向增大δv2,或正向减小δv2;返回所述确定t3时刻观测卫星对目标卫星的观测矢量的步骤进行迭代,直至δv2满足优化精度要求;
46、然后,进一步优化δv2和优化δv1,包括:
47、进一步优化δv2:当解算出观测位置与地心距离,比理想观测位置与地心距离小时,则正向增大δv2,或负向减小δv2;当解算出观测位置与地心距离,比理想观测位置与地心距离大时,则负向增大δv2,或正向减小δv2;同时更新t1、t2、δt1、δt2、δt3,返回所述确定t3时刻观测卫星对目标卫星的观测矢量进行再次求解;其中,δt1=t1-t0,δt2=t2-t1,δt3=t3-t2;
48、优化δv1:当解算的观测位置与理想观测位置相比偏东时,正向增大δv1,或负向减小δv1;当解算的观测位置与理想观测位置相比偏西时,负向增大δv1,或正向减小δv1;同时更新t1、t2、δt1、δt2、δt3,返回所述确定t3时刻观测卫星对目标卫星的观测矢量进行再次求解;当
49、当与之差达到计算精度要求时,优化求解完成;
50、最后再对δv2和δv1进行联合优化,包括:
51、(a)固定δv1,优化δv2,找出对于目前δv1最优的δv2;
52、(b)固定δv2,优化δv1,找出对于目前δv2最优的δv1,之后返回步骤(a)循环求解寻优;
53、当与之差达到计算精度要求时,优化求解完成。
54、本发明与现有技术相比的优点在于:
55、(1)本发明提供的调整轨道半长轴的任务规划方法,仅需要将卫星准同步圆轨道调整为椭圆轨道,使卫星运动至远地点距离目标最近且具备顺光条件,用于轨道高度调整机动仅需要1次,与现有的通过2次机动将圆轨道抬高的方法相比,卫星速度增量消耗量降低约50%,推进剂消耗量降低约50%。
56、(2)本发明提供的调整轨道半长轴的任务规划方法,轨道高度调整机动仅需要1次,在抵近观测前12小时进行,与现有技术相比,轨道高度调整时间的缩短,可提高巡视隐蔽性、时效性和效率。
57、(3)本发明提供的调整轨道半长轴的任务规划方法,可以实现从轨道面内任意方向对目标进行观测,大幅提高巡视灵活性和情报价值。
58、(4)本发明提供的调整轨道半长轴的任务规划方法,可以实现对异面目标的漂移巡视观测,对卫星自身倾角和目标倾角均无限制,适应性较强。
59、(5)本发明提供的调整轨道半长轴的任务规划方法,卫星在轨可以不进行南北位保,甚至入轨阶段可以预制一定倾角,可以将卫星南北位保和变轨的推进剂转化为在轨巡视任务推进剂,大幅提高卫星巡视效能。
- 还没有人留言评论。精彩留言会获得点赞!