力与力矩定向解耦的芯级箭体结构设计方法及芯级箭体与流程
1.本发明属于结构设计技术领域,尤其涉及力与力矩定向解耦的芯级箭体结构设计方法及芯级箭体。
背景技术:
2.某大型捆绑式液体运载火箭的载荷为千吨级别,其构型具有多级,如助推级、芯一级、芯二级等。其中,各助推发动机顶端的斜头锥分别经前捆绑接头与芯级箭体连接。在飞行过程中,各助推发动机(以下简称助推发动机)产生的集中式推力通过前捆绑接头传递至芯级箭体,并推动整个运载火箭飞行。
3.为增加运载火箭的有效载荷,火箭箭体的全部结构(包括芯级箭体)都需要满足轻量化设计要求。
4.而按照传统的火箭结构设计方法,为保证捆绑点的联接强度、结构强度及结构完整性,联接螺栓需成组地密集分布。相应地,前捆绑接头及芯级箭体的壳体则需要密集开孔。密集开孔后,开孔区域就需要额外地局部补强。如此,使得芯级箭体、前捆绑接头难以同时满足承载要求及轻量化设计要求。
技术实现要素:
5.针对以上问题,本技术提供力与力矩定向解耦的芯级箭体结构设计方法及芯级箭体,以解决现有技术中存在的芯级箭体、前捆绑接头难以同时满足承载要求及轻量化设计要求的技术问题。
6.第一方面,本技术提供一种力与力矩定向解耦的芯级箭体结构设计方法,用于前捆绑接头与芯级箭体的连接设计,该方法包括:设计由芯级箭体的第一壳体(20)来承载助推发动机(100)提供的推力的等效纵向推力;设计由芯级箭体的第二壳体(30)来承载助推发动机(100)提供的推力的等效附加弯矩,其中,第一壳体(20)设置在第二壳体(30)的上方,第一壳体(20)与第二壳体(30)的中心轴线对齐;设计将前捆绑接头40设置在第二壳体(30)的外侧,其中,前捆绑接头40还用于与助推发动机(100)连接,以承载助推发动机(100)提供的推力。
7.进一步地,设计由芯级箭体的第一壳体(20)来承载助推发动机(100)提供的推力的等效纵向推力,包括:设计第一壳体20的第一连接部21、第一承载壳壁22,将第一承载壳壁22与第一连接部21连接;设计第二壳体30的第二连接部31、第二承载壳壁32,将第二连接部31与第二承载壳壁32连接;设计前捆绑接头40的第三连接部41、第三传力壁板42,第三连接部41与第三传力
壁板42连接;沿纵向,将第一连接部21、第二连接部31、第三连接部41依次连接;沿横向,将第二承载壳壁32与第三传力壁板42连接。
8.进一步地,设计由芯级箭体的第二壳体30来承载助推发动机100提供的推力的等效附加弯矩,包括:设计第二壳体30的弯矩承载部33,将弯矩承载部33与第二承载壳壁32连接;设计前捆绑接头40的弯矩传递部43,将弯矩传递部43与第三传力壁板42连接;沿横向,将弯矩承载部33与弯矩传递部43连接。
9.进一步地,设计由芯级箭体的第二壳体30来承载助推发动机100提供的推力的等效附加弯矩,还包括:设计弯矩承载部33包括沿纵向延伸的承载纵板33c,承载纵板33c沿纵向分布上侧长圆孔组和下侧长圆孔组,其中,上侧长圆孔组位于下侧长圆孔组的上方,全部长圆孔的中心线重合,长圆孔在长度方向的尺寸大于沿宽度方向的尺寸;沿横向,将承载纵板33c的上部与第二承载壳壁32连接;设计弯矩传递部43沿纵向分布至少两列螺纹孔;设计将上侧联接螺柱组60a穿过上侧长圆孔组;设计将下侧联接螺柱组60b穿过下侧长圆孔组。
10.进一步地,设计由芯级箭体的第二壳体30来承载助推发动机100提供的推力的等效附加弯矩,还包括:设计承载纵板33c包括沿纵向划分后的上侧部分和下侧部分;设计上侧部分包括纵向部、横向部,纵向部与横向部组合为l型;将上侧部分的纵向部和横向部分别抵靠在第二承载壳壁32的内侧面和底面。
11.进一步地,设计由芯级箭体的第二壳体30来承载助推发动机100提供的推力的等效附加弯矩,还包括:设计弯矩承载部33包括至少两个纵梁,纵梁包括相对设置的内侧纵向窄板33b、外侧异形窄板及横向窄板33a,并将外侧异形窄板作为承载纵板33c;设计第二承载壳壁32作为外侧纵向弧形板32b,设计第二承载壳壁32还包括环形横板32a、内侧纵向弧形板32c,将外侧纵向弧形板32b、环形横板32a、内侧纵向弧形板32c依次连接;设计将至少两个纵梁嵌合于外侧纵向弧形板32b、环形横板32a、及内侧纵向弧形板32c围合而成的环形腔室;相应地,设计将第三传力壁板42抵靠在外侧纵向弧形板32b并连接。
12.进一步地,设计将前捆绑接头40设置在第二壳体30的外侧,还包括:设计前捆绑接头40还包括助推安装翅板44、助推安装底板45,助推安装底板45与横向成预设夹角;设计在助推安装底板45设置贯通孔46,以使得助推发动机100穿过贯通孔46。
13.进一步地,每列螺纹孔中的螺纹孔数量不小于上侧长圆孔组中的长圆孔的数量与下侧长圆孔组中的长圆孔的数量之和。
14.进一步地,还包括:
设计将依次连接的内侧纵向窄板33b、横向窄板33a、外侧异形窄板组合为一体化结构的纵梁。
15.第二方面,本技术提供一种大型捆绑式液体运载火箭的芯级箭体,采用前述说明的力与力矩定向解耦的芯级箭体结构设计方法设计得到。
16.本技术实施例提供的力与力矩定向解耦的芯级箭体结构设计方法及芯级箭体,针对前捆绑接头与大型捆绑式液体运载火箭的芯级箭体的连接,在捆绑点区域进行优化的结构设计,实现了轻量化设计的芯级箭体,一方面优化了结构强度,另一方面满足了结构轻量化设计要求。
附图说明
17.图1为本技术实施例的力与力矩定向解耦的芯级箭体结构设计方法的流程示意图;图2a为本技术实施例的某型捆绑式液体运载火箭的芯级箭体与前捆绑接头的连接及受力示意图;图2b为本技术实施例的某型捆绑式液体运载火箭的芯级箭体与前捆绑接头在捆绑点区域的结构示意图;图2c为本技术实施例的某型捆绑式液体运载火箭的芯级箭体与前捆绑接头在捆绑点区域的力与力矩定向解耦的受力示意图;图3为本技术实施例的某型捆绑式液体运载火箭的芯级箭体与前捆绑接头在捆绑点区域的组成示意图;图4为本技术实施例的某型捆绑式液体运载火箭的芯级箭体的纵梁的结构示意图;图5a为本技术实施例的某型捆绑式液体运载火箭的前捆绑接头的第一结构示意图;图5b为本技术实施例的某型捆绑式液体运载火箭的前捆绑接头的第二结构示意图;图6为本技术实施例的某型捆绑式液体运载火箭的受力示意图;其中,10.上部壳体;20.第一壳体;21.第一连接部;22.第一承载壳壁;30.第二壳体;31.第二连接部;32.第二承载壳壁;32a.环形横板;32b.外侧纵向弧形板;32c.内侧纵向弧形板;33.弯矩承载部;33a.横向窄板;33b.内侧纵向窄板;33c.承载纵板、外侧异形窄板;40.前捆绑接头;41.第三连接部;42.第三传力壁板;43.弯矩传递部;44.助推安装翅板;44a.左侧翅板;44b.右侧翅板;45.安装底板;46.贯通孔;47.下部异形孔;48.上部异形孔;49a.第一列螺纹孔;49b.第二列螺纹孔;60a.上侧联接螺柱组;60b.下侧联接螺柱组;70.液体燃料贮箱;100.助推发动机。
具体实施方式
18.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员
在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。另外,本发明提供的各个实施例或单个实施例中的技术特征可以相互任意结合,以形成可行的技术方案,这种结合不受步骤先后次序和/或结构组成模式的约束,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时,应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
19.为了准确地对本技术中的技术内容进行叙述,以及为了准确地理解本技术,在对具体实施方式进行说明之前先对本说明书中所使用的术语给出如下的解释说明或定义。
20.如图6和图3所示,大型捆绑式液体运载火箭的芯级箭体与助推发动机100在其斜头锥部分采用捆绑接头连接,如此,使得助推发动机的巨大推力经前捆绑接头40传递沿纵向的推力fa
*
至芯级箭体。如,某大型捆绑式液体运载火箭的芯级箭体在4个捆绑点与4个助推发动机分别采用捆绑接头连接,助推发动机的巨大推力通过捆绑接头传递至芯级箭体。
21.如图6及图2a所示,助推发动机经前捆绑接头40提供的助推推力f沿斜头锥的轴线斜向上,与芯级箭体的中心轴线呈预设夹角。在各捆绑点,助推发动机沿纵向的推力fa的作用线距离其附近的芯级箭体的壳壁存在一定的距离。如,图2a示出了芯级箭体的壳壁围绕芯级箭体中心轴线的一母线jj,这时,助推发动机沿纵向的推力fa的作用线与芯级箭体的壳壁之间的距离记为l,则作用在捆绑点区域的附加弯矩m=l*fa
#
,作用在第二壳体及第二壳体的等效纵向推力记为fa*。
22.应该理解为,前捆绑接头、芯级箭体包括的各薄壁壳体(用于容纳具有毫米量级厚度的壳壁,如液体燃料贮箱),分别可以视为一个结构。这些结构上的每一个区域可能会承受特定的力载荷或力矩载荷,且需要经受预设的载荷而不失稳、不被破坏。
23.由于助推发动机推力的作用线距离芯级箭体的壳壁存在不可忽略的距离,如图2a和图3所示,所示,巨大的助推推力在捆绑点经捆绑接头传递至芯级箭体的同时,偏心的助推推力还会产生巨大的附加弯矩m,并耦合地经捆绑接头传递至芯级箭体。针对这种力和力矩纠缠在一起并耦合传递的现象,按传统的火箭结构设计方法,会产生如下两个设计难题:
①
推力及其附加弯矩均会作用在芯级箭体的捆绑点区域的上方,将使得该区域的结构,如上部壳体10为氧箱筒段、第一壳体20为氧箱后短壳、第二壳体30为箱间段壳体,产生压缩失稳而破坏。欲使该区域能够承受该推力及附加弯矩而不失稳,则结构势必非常粗壮,最终设计得到的芯级箭体将很难满足结构轻量化设计要求。
②
力和力矩纠缠在一起并耦合传递,联接螺栓将需要同时承受力和力矩,承载将非常恶劣,势必需要增加联接螺栓的公称直径,相应地壳体上设置的联接螺栓孔的直径也需要增加,则对应的开孔区域需要进一步补强。另一方面,考虑到力及其附加弯矩的集中传递,联接螺栓必须密集分布才能承受这种苛刻的载荷,联接螺栓密布后,壳体上亦需要密集开孔,密集开孔的开孔区域更难补强,最终设计难以同时满足承载及轻量化的设计要求。
24.如图2a所示,在火箭飞行阶段,助推发动机100在集中力作用点q提供的助推推力f包括沿纵向的推力fa。助推发动机沿纵向的推力fa的作用线距离芯级的壳壁存在一定的距离。
25.如图2c所示,本发明实施例的力与力矩定向解耦的芯级箭体结构设计方法,实现了将助推发动机100在集中力作用点q提供的纵向的推力fa定向解耦为由第一壳体20承载的等效纵向推力fa
*
、第二壳体30承载的推力附加弯矩m
*
。如此,等效纵向推力fa
*
用于依次
推动前捆绑接头40、第二壳体30、第一壳体20沿纵向向上移动。如此,推力附加弯矩m
*
由前捆绑接头40、第二壳体30承载,而不会传递到第一壳体20。通过阻断推力附加弯矩m
*
向第一壳体20、上部壳体10传递,将推力附加弯矩m
*
限制在捆绑点区域,改善了第一壳体20和上部壳体10的承载条件。
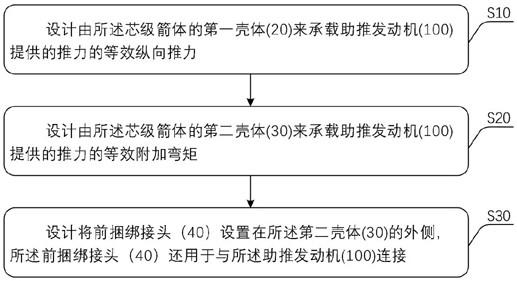
26.如图1所示,本发明实施例的力与力矩定向解耦的芯级箭体结构设计方法,用于前捆绑接头与芯级箭体的连接设计,包括以下步骤:s10:设计由芯级箭体的第一壳体来承载助推发动机提供的推力的等效纵向推力;s20:设计由芯级箭体的第二壳体来承载助推发动机提供的推力的等效附加弯矩,其中,第一壳体设置在第二壳体的上方,第一壳体与第二壳体的中心轴线对齐;s30:设计将前捆绑接头设置在第二壳体的外侧,如,在第二壳体的外壁的周向,前捆绑接头用于与助推发动机连接,承载助推发动机提供的推力。
27.如此,在飞行阶段,沿第二壳体的周向均匀设置的多个助推发动机提供的推力分别经前捆绑接头依次传递至第二壳体与第一壳体,以推动芯级箭体飞行。多个助推发动机提供的推力分别在芯级箭体实现力与力矩定向解耦,第一壳体承载等效纵向推力,第二壳体承载等效附加弯矩,一方面优化了结构强度,另一方面满足了结构轻量化设计要求。
28.具体地,步骤s10中,设计由芯级箭体的第一壳体来承载助推发动机提供的推力的等效纵向推力,包括:设计第一壳体20的第一连接部21、第一承载壳壁22,第一承载壳壁22与第一连接部21连接;设计第二壳体30的第二连接部31、第二承载壳壁32,第二连接部31与第二承载壳壁32连接;设计前捆绑接头40的第三连接部41、第三传力壁板42,第三连接部41与第三传力壁板42连接;沿纵向,将第一连接部21、第二连接部31、第三连接部41依次连接;沿横向,将第二承载壳壁32与第三传力壁板42连接,以使得所述助推发动机100提供的推力的等效纵向推力经所述第三传力壁板42、所述第二承载壳壁32沿纵向向上传递。
29.如此,在飞行阶段,助推发动机提供的推力经第三传力壁板42、第三连接部41、第二承载壳壁32,依次传递至第二连接部31、第一连接部21、第一承载壳壁22,以使得的等效纵向推力推动芯级箭体沿纵向飞行。
30.具体地,第一连接部21包括上法兰体;第二连接部31包括中法兰体,第三连接部41包括下法兰体。相应地,将第一连接部21、第二连接部31、第三连接部41依次连接,包括:利用联接螺栓组将上法兰体、中法兰体、下法兰体依次连接。
31.如此,通过使得与具有回转体结构的各壳壁、壁板分别连接的上、中、下法兰体依次对齐,使得第一壳体的外壁与第二壳体的外壁对齐,如,壳壁的外缘对齐,进而使得第一壳体、第二壳体沿纵向串联连接。
32.如此,如图3所示,实现将助推发动机的推力分布式地自前捆绑接头40、第二壳体30、第一壳体20依次沿纵向传递,以推动与第一壳体20的第一承载壳壁22连接的上部壳体10内容纳的液体燃料贮箱70,并实现以上各结构承受该推力而不失稳或破坏。
33.具体地,沿横向,将第二承载壳壁32与第三传力壁板42连接,可以采用铆接,不再
赘述。
34.具体地,步骤s20中,设计由芯级箭体的第二壳体来承载助推发动机提供的推力的等效附加弯矩,包括:设计第二壳体30的弯矩承载部33,将弯矩承载部33与第二承载壳壁32连接,如铆接;设计前捆绑接头40的弯矩传递部43,将弯矩传递部43与第三传力壁板42连接;沿横向,将弯矩承载部33与弯矩传递部43连接,以使得所述助推发动机(100)提供的推力的等效附加弯矩经弯矩传递部43传递到弯矩承载部33,并阻断等效附加弯矩经第二承载壳壁32继续向第一壳体20的第一承载壳壁22传递。
35.如此,第二承载壳壁32、弯矩承载部33共同对应于前捆绑接头在芯级箭体上的捆绑点。如此,前捆绑接头分别通过第三连接部41、第三传力壁板42、及弯矩传递部43捆绑在芯级箭体上。
36.如此,如图3、图5a、图5b、图6所示,在飞行阶段,沿前捆绑接头40与第二壳体30的径向,助推发动机提供的推力分布式地经弯矩传递部43与弯矩承载部33依次传递并由弯矩承载部33承载前述的等效附加弯矩,并实现以上各结构承受该附加弯矩而不失稳或破坏。
37.具体地,如图2c、图2b所示,步骤s20中,设计由芯级箭体的第二壳体来承载助推发动机提供的推力的等效附加弯矩,还可以包括:设计弯矩承载部33包括沿纵向延伸的承载纵板33c,承载纵板33c沿纵向分布上侧长圆孔组和下侧长圆孔组,其中,上侧长圆孔组位于下侧长圆孔组的上方,全部的长圆孔的中心线重合,其中,长圆孔在长度方向的尺寸大于沿宽度方向的尺寸;如上侧长圆孔组位于承载纵板的中部,下侧长圆孔组位于承载纵板33c的下部;相应地,沿横向,设计将承载纵板33c的上部与第二承载壳壁32连接,如铆接;设计弯矩传递部43沿纵向分布至少两列螺纹孔,如图5b所示的第一列螺纹孔49a、第二列螺纹孔49b;将上侧联接螺柱组60a穿过上侧长圆孔组、第一列螺纹孔49a的上部或第二列螺纹孔49b的上部;将下侧联接螺柱组60b穿过下侧长圆孔组、第一列螺纹孔49a的下部或第二列螺纹孔49b的下部。
38.如此,在飞行阶段,如图2c所示,设置两组下侧联接螺柱组及上侧联接螺柱组,沿横向,经下侧联接螺柱组、下侧长圆孔组、及两列螺纹孔传递(下侧联接螺柱组受压),经上侧联接螺柱组、上侧长圆孔组、及两列螺纹孔传递(上侧联接螺柱组受拉),承载纵板33c的上部与第二承载壳壁32呈分离趋势,第二承载壳壁32不承载前述的等效附加弯矩。如此,由承载纵板33c整体上承载助推发动机提供的推力产生的等效附加弯矩。
39.如此,在横向,与承载纵板33c的上部紧贴的第二承载壳壁32不承载弯矩m
*
,进而阻止助推发动机提供的推力产生的等效附加弯矩m*经第二承载壳壁32继续向第一壳体传递,实现了力与力矩的定向解耦。
40.参照图2a、2b及2c,对定向解除芯级箭体与捆绑接头之间的推力与附加弯矩耦合的设计方法说明如下:如图2c所示的力与力矩解除耦合的原理性示意图,在承载纵板33c上,与各联接螺
柱组配合的螺栓连接孔均为长圆孔,可以实现各联接螺柱组与承载纵板沿纵向的可滑动接触装配。由此实现承载纵板33c的中部和下部只传递水平方向,也即横向的横向拉力载荷(如图中的f)或压力载荷(如图中的-f),不传递经前捆绑接头的弯矩传递部43传递的来自助推发动机的推力fa而使得螺栓承载沿其径向的剪力载荷(沿竖直方向,也即纵向)。而推力附加弯矩m传递过此区域后,弯矩m
*
被转化为纵梁后端,也即前述的承载纵板33c的下部承受的拉力(由连接螺柱传递)和纵梁前端,也即前述的承载纵板33c的中部承受的压力(由连接螺柱传递)。如此,这两个区域的拉力和压力形成沿力偶作用线k的力偶力矩m*,该力偶力矩m*由承载纵板33c或下述的纵梁承受。
41.由于长圆孔形成的可滑动装配,可以使得连接螺柱不承受前述的等效纵向推力形成的螺栓剪力。与前捆绑接头在捆绑点对应的第二壳体的第二承载壳壁不承受附加弯矩,而纵向的推力则经第三传力壁板、第二承载壳壁继续向前向上传递。
42.如此,利用弯矩传递部43、承载纵板33c、上侧联接螺柱组、及下侧联接螺柱组形成力偶力矩,实现力和力矩的解耦,最终助推推力及其附加弯矩被解除耦合关系,分开传递,在芯级箭体的壳体上被分布式地承受,如此可以使得捆绑点附近区域的薄壁壳体的设计及联接螺栓的载荷环境大为缓和。
43.如此,在飞行阶段,如图2c所示,沿纵向,上侧联接螺柱组可在上侧长圆孔组内沿纵向滑动,下侧联接螺柱组可在下侧长圆孔组内沿纵向滑动,即使在飞行随机载荷或振动载荷作用下,也不会与长圆孔的下边沿或上边沿接触,继而不承载纵向的推力。
44.具体地,每列螺纹孔中的螺纹孔数量不小于上侧长圆孔组中的长圆孔的数量与下侧长圆孔组中的长圆孔的数量之和。
45.具体地,步骤s20中,设计由芯级箭体的第二壳体来承载助推发动机提供的推力的等效附加弯矩,还可以包括:设计所述承载纵板33c包括沿纵向划分后的上侧部分和下侧部分;设计上侧部分包括纵向部、横向部,纵向部与横向部组合为l型;将上侧部分的纵向部和横向部分别抵靠在第二承载壳壁32的内侧面和底面。
46.如此,在纵向,经承载纵板33c的l型的上侧部分,可以进一步传递及承载等效纵向推力,有利于第三传力壁板42、第二承载壳壁32、及第一承载壳壁22分别承受该等效纵向推力推力而不失稳。
47.如此,在飞行阶段,如图2c所示,沿纵向,助推发动机提供的推力经第三传力壁板42、承载纵板33c、第二承载壳壁32沿纵向传递,最终由第一壳体承载助推发动机提供的推力产生的等效纵向推力,并推动与第一壳体20的第一承载壳壁22连接的上部壳体10以及其容纳并连接的液体燃料贮箱70。
48.具体地,步骤s20中,设计由芯级箭体的第二壳体来承载助推发动机提供的推力的等效附加弯矩,还可以包括:设计弯矩承载部33包括至少两个纵梁,纵梁包括相对设置的内侧纵向窄板33b、外侧异形窄板及横向窄板33a,将外侧异形窄板作为承载纵板33c;设计第二承载壳壁32作为外侧纵向弧形板32b,设计第二承载壳壁32还包括环形横板32a、内侧纵向弧形板32c,外侧纵向弧形板32b、环形横板32a、内侧纵向弧形板32c依次连接;
设计将至少两个纵梁嵌合于外侧纵向弧形板32b、所述环形横板32a、及内侧纵向弧形板32c围合而成的环形腔室;相应地,设计将第三传力壁板42抵靠在外侧纵向弧形板32b并连接,如铆接。
49.如此,横向窄板33a抵靠于环形横板32a,内侧纵向窄板33b、外侧异形窄板分别与外侧纵向弧形板32b、内侧纵向弧形板32c嵌合,有利于提高结构的刚度和强度。
50.具体实施时,如图4所示,设计将依次连接的内侧纵向窄板33b、横向窄板33a、外侧异形窄板组合为一体化结构的纵梁,如此,既便于机械加工,也有利于提高结构的刚度和强度。如,采用工字结构钢型材加工纵梁的各窄板。
51.具体实施时,如图2b所示,设计将依次连接的外侧纵向弧形板32b、环形横板32a、内侧纵向弧形板32c、第二连接部31组合为一体化结构的前框,既便于机械加工,也有利于提高结构的刚度和强度。应该理解为,前框为回转体结构。
52.如此,沿前捆绑接头的弯矩传递部43、至少两个纵梁,助推发动机提供的推力分布式地依次传递。如图2c所示,纵梁以力偶力矩m
*
的形式承载推力fa产生的等效附加弯矩m,第二承载壳壁32不承载产生的等效附加弯矩。
53.如此,横向窄板33a抵靠在环形横板32a,外侧异形窄板的上部抵靠在外侧纵向弧形板32b,内侧纵向窄板33b紧贴内侧纵向弧形板32c。
54.如此,在飞行阶段,沿纵向,助推发动机提供的推力经第三传力壁板42、纵梁、第二承载壳壁32分布式地依次沿纵向传递,由第一壳体承载承载助推发动机提供的推力产生的等效纵向推力。
55.具体地,步骤s30中,设计将前捆绑接头设置在第二壳体的外侧,还可以包括:如图5a和图5b所示,设计前捆绑接头40的助推安装翅板44、助推安装底板45,助推安装翅板44包括沿纵向延伸的左侧翅板44a、右侧翅板44b,助推安装底板45与横向成预设夹角;在助推安装底板45设置贯通孔46,以使得助推发动机穿过贯通孔后,位于左侧翅板44a、右侧翅板44b围合的空间内。
56.具体地,为进一步减重,还可以设计在助推安装翅板44设置减重孔,参照现有技术实施即可,不再赘述。
57.具体地,为进一步延长助推发动机的推力沿前捆绑接头具有更长的周向扩散及传递路径,避免应力集中,还可以设计在弯矩传递部43位于助推安装翅板44之内的部分设置较大面积的孔,并扩大弯矩传递部43位于助推安装翅板44之外部分的面积及尺寸,参照现有技术实施即可,不再赘述。
58.具体地,为进一步延长助推发动机的推力沿前捆绑接头具有更长的周向扩散及传递路径,避免应力集中,还可以设计在第三传力壁板42位于助推安装翅板44之上的区域设置较大面积的孔,并扩大第三传力壁板42位于助推安装翅板44之上及之外部分的面积及尺寸,参照现有技术实施即可,不再赘述。
59.如此,又因为前捆绑接头40沿周向设置在第二壳体的外侧,前捆绑接头40形成如图5a的簸箕状,扣合在第二壳体的外侧。
60.如此,轻量化设计后,前捆绑接头40设置有上部异形孔48、下部异形孔47,其中,上部异形孔48位于下部异形孔47的上方。
61.本技术实施例的一种大型捆绑式液体运载火箭的芯级箭体,采用前述任一项的结
构设计方法设计得到,如图3、图2b、图4、图5a、图5b所示,如此,该捆绑式液体运载火箭的芯级箭体在4个捆绑点与4个助推发动机分别采用捆绑接头连接,助推发动机的巨大推力通过捆绑接头传递至芯级箭体,因其力及力矩实现了定向解耦,芯级箭体的结构强度得到了优化,结构实现了轻量化。
62.针对本技术实施例的大型捆绑式液体运载火箭的芯级箭体装配时,参照前述结构设计方法中展示的各部件之间的连接方式进行,不再赘述。
63.如图2c和图3所示,装配完成后,该芯级箭体自上而下,依次包括三组连接件。第一组连接件用于分布地连接第一壳体20和第二壳体30,以分布式地在纵向承载。第二组连接件80用于分布地连接前捆绑接头40和第二承载壳壁32,以分布式地在横向承载。第三组连接件,如上侧联接螺柱组60a和下侧联接螺柱组60b,用于分布地连接前捆绑接头和纵梁,以分布式地在横向承载,并形成力偶力矩。
64.如图3所示,连接第二壳体30的后框与其前框的扩散肋板、扩散筋板、桁条等,参照现有技术实现,不再赘述。
65.本技术实施例提供的针对大型捆绑式液体运载火箭的芯级箭体的力及力矩的定向解耦方法,通过主动进行力和力耦的解耦设计,使得力及其附加弯矩解耦,并在芯级火箭的捆绑点区域分别按照预设的路径扩散及传递,使得力和附加弯矩由位于不同区域的不同的结构件来承受,避免了力和附加弯矩的集中传递和承载,为结构设计提供更加缓和的载荷条件,有利于实现结构的轻量化设计。
66.本技术实施例提供的针对大型捆绑式液体运载火箭的芯级箭体的力及力矩的定向解耦方法应用于某型火箭芯级箭体的前捆绑点的承力、传力、扩散力的设计,实现结构减重500kg以上。
67.在本发明的描述中,需要理解的是,前述的配合、对中或适配,分别具有本领域技术人员所公知的配合精度、尺寸公差、形状误差、轮廓误差、和/或形位误差等,不再赘述。前述的块、板、杆、架、片,分别具有本领域技术人员所公知的横向尺寸与纵向尺寸的比例、尺寸公差、形状误差、轮廓误差、和/或形位误差、配合精度等,不再赘述。
68.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
69.在本发明的描述中,“多个”的含义是两个以上,除非另有明确具体的限定。
70.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接(如,焊接、粘接、螺纹、螺钉、销钉、铆钉等),也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
71.在本发明中,除非另有明确的规定和限定,第一特征在第二特征
ꢀ“
上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示
第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
72.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、
ꢀ“
示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
73.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
74.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围。以上说明对本发明而言只是说明性的,而非限制性的,本领域普通技术人员理解,在不脱离权利要求所限定的精神和范围的情况下,可作出许多修改、变化或等效,但都将落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1