一种方格网式城市道路网络人工智能自动生成方法
1.本发明属于城市规划领域,具体涉及一种方格网式城市道路网络人工智能自动生成方法。
背景技术:
2.在城市道路规划设计工作中,方格网式城市道路作为一种最常见的道路网类型,常用于地形平坦的城市。传统的方格网式城市道路规划工作,主要依靠人力结合现行规范进行规划设计,在规划设计时难以完全按照城市道路国标规范进行,比较依赖规划设计者的工作经验,成果也不够科学,且在面临复杂自然地形时,更是显得力不从心,工作具有一定的挑战性。
3.目前已有的方格网式城市道路网络生成方法,一种是采用计算机图形学建模的方式,通过认为设置的生成规范自动化生成路网模型,虽然满足了指标但算法机械且粗糙,再通过进化算法来优化这一过程,但基于进化算法生成的道路缺乏内在逻辑,生成的方案较为混乱,因此该方法缺乏工程意义。另一种是基于图像学习,通过学习海量道路网络样本的规律,训练对抗生成网络模型,在严格规定大小地块内生成道路网络,是一种耗时较长的纯图像学习方法,这种方式存在着模型训练速度较慢,缺乏自动化校核功能,人工筛选可行道路网络的成本较高等问题;
技术实现要素:
4.针对现有技术的不足,本发明的目的在于提供一种方格网式城市道路网络人工智能自动生成方法。
5.本发明的目的可以通过以下技术方案实现:
6.一种方格网式城市道路网络人工智能自动生成方法,包括以下步骤:
7.s1、采集相关基地数据,并输入地理信息系统平台,获得目标基地边界、主干路中心线和城市大类用地三个图层集;
8.s2、合并目标基地边界和主干路中心线生成地块图层,叠合城市大类用地赋予地块属性,并删除地块图层中非路网覆盖属性的用地,再根据距离设定和推进波前法,获得街区场域数据库;
9.s3、在地块边界随机置入外部控制点,在地块内部随机置入均匀网格并适应场地旋转,外部控制点和内部控制点偏移至距离最近的街区场域交点,获得控制点序列集;
10.s4、将外部控制点和内部控制点序列集按照序列升序,遍寻两两控制点之间折角最小的街区场域线段,获得干路道路网络;
11.s5、三维交互投影道路方案,并激光打印选定方案,最终获得道路方案的工程报告图纸。
12.进一步地,所述相关基地数据包括:目标基地边界数据、目标基地边界内的主干路数据和城市大类用地数据。
13.进一步地,所述目标基地边界数据和所述目标基地边界内的主干路数据通过无人机设备采集;所述目标基地边界内的城市大类用地数据通过城市开源数据平台采集。
14.进一步地,所述城市大类用地包括:a类公共管理与公共服务用地、b类商业服务设施用地、r类居住用地、m类工业用地、g类绿地与广场用地、e类非建设用地。
15.进一步地,所述非路网覆盖属性的用地包括:a类公共管理与服务设施用地、g类绿地与广场用地以及e类非建设用地。
16.进一步地,所述推进波前法,是将可生成道路网络场地图层边界按照设定距离由地块边缘向地块中心推进,随机自动生成网格,获得街区场域。
17.进一步地,所述s3中获得控制点序列集的步骤为:
18.s31,对所述可生成道路网络场地图层边界的任意两个端点之间随机置入一定间距的外部控制点,取地块n1、n2、n3
…
nn最大外接矩形并计算空间偏转角度θ1、θ2、θ3
…
θn;
19.s32,在街区地块内部按照城市中不同功能地区的街区尺度推荐值,生成标准均匀网格,将所述网格旋转θn角度并筛选出地块边界网格获得内部控制点;
20.s33,对所述外部控制点和内部控制点偏移至距离最近的s2获得的街区场域交点;
21.s34,根据经纬度坐标依次获得外部控制点和内部控制点的序列,获得控制点序列集(x1,y1),(x2,y2),(x3,y3)
…
(xn,yn)。
22.进一步地,所述s4中获得干路道路网络的步骤为:
23.s41,根据s3所述控制点序列集,控制点(xn-1,yn-1)与控制点(xn,yn)之间折角最小的原则遍寻街区场域线段,所述折角最小原则是两个控制点有n种街区场域的连接方式,计算每种连接方式中街区场域各线段之间的夹角总和,取其中夹角总和最小的街区场域连接方式;
24.s42,按照控制点x坐标依次升序,y坐标依次升序的序列,生成地块内横向、纵向干路,获得干路道路网络。
25.本发明的有益效果:
26.1、本方法通过城市道路规范与人工智能技术的结合,能够在短时间内同时生成路网方案,减少人力成本,提高设计效率;
27.2、本方法基于现行最新的城市道路规划设计规范要求,通过设定每类用地属性的街区场域距离,可以保证路网生成结果的规范性;
28.3、本方法通过波前推进法与均匀网格法,结合人工智能算法生成城市方格网式路网,提高了各级路网的规范性,保证了自动生成方案集的科学性;
29.4、本方法生成成果通过三维平台展示,可人机互动地通过操纵杆手动增减道路或改变线形,便于对方案进行实时调整,最终可输出道路规划设计工程报告图纸。
附图说明
30.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
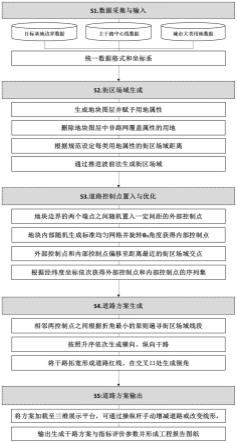
31.图1是本发明生成方法流程图;
32.图2是本发明前期数据录入示意图;
33.图3是本发明街区场域数据集生成示意图;
34.图4是本发明过程干路路网生成示意图;
35.图5是本发明生成的道路交通规划工程图纸。
具体实施方式
36.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
37.如图1所示,一种方格网式城市道路网络人工智能自动生成方法,包括以下步骤:
38.s1:数据采集与输入;
39.如图2所示,采集相关基地数据,并输入至地理信息平台中,通过地理信息平台中的格式转换工具将上述相关基地数据格式统一转化为shapefile,通过地理信息平台中的投影工具将上述相关基地数据坐标统一转化为worldgeodetic system-1984,获得目标基地边界、主干路中心线和城市大类用地三个图层集;
40.相关基地数据包括目标基地边界数据、目标基地边界内的主干路数据、和城市大类用地数据;其中,目标基地边界数据和目标基地边界内的主干路数据通过p580多旋翼无人机设备采集,搭载相机像素为2000万及以上、cmos为1/2.3英寸、焦距为14.66mm、存储容量在256gb以上;目标基地边界内的城市大类用地数据通过城市开源数据平台采集;城市大类用地包括:a类公共管理与公共服务用地、b类商业服务设施用地、r类居住用地、m类工业用地、g类绿地与广场用地、e类非建设用地。
41.s2:街区场域生成;
42.合并s1得到的目标基地边界和主干路中心线两个图层,生成地块图层,叠合城市大类用地赋予地块图层用地属性,获得具有城市大类用地属性的地块图层;根据城市规划设计的实际意图要求,删除地块图层中非路网覆盖属性的用地,获得目标基地边界内可生成道路网络场地图层,对图层内地块编号n1、n2、n3
…
nn。
43.根据《gbt 51328-2018城市综合交通体系规划标准》设定每类用地属性的街区场域距离,b类商业服务设施用地的街区场域距离为100-200m;r类居住用地的街区场域距离不大于300m;m类工业用地的街区场域距离不大于600m。
44.如图3所示,根据设定的每类用地属性的街区场域距离和推进波前法生成街区场域,通过地理信息平台中的要素折点转点工具生成街区场域交点,获得街区场域数据集;
45.所述推进波前法,是将可生成道路网络场地图层边界按照设定距离由地块边缘向地块中心推进,随机自动生成网格,获得街区场域。
46.s3:道路控制点置入与优化;具体步骤为:
47.s31,对所述可生成道路网络场地图层边界的任意两个端点之间随机置入一定间距的外部控制点,取所述地块n1、n2、n3
…
nn最大外接矩形并计算空间偏转角度θ1、θ2、θ3
…
θn,所述间距范围为400-600米的规定设置;
48.s32,在街区地块内部按照《gbt51328-2018城市综合交通体系规划标准》中对于城市中不同功能地区的街区尺度推荐值,生成标准均匀网格,将所述网格旋转θn角度并筛选
出地块边界网格获得内部控制点;
49.s33,对所述外部控制点和内部控制点偏移至距离最近的s2获得的街区场域交点;
50.s34,根据world geodetic system-1984的经纬度坐标依次获得外部控制点和内部控制点的序列,获得控制点序列集(x1,y1),(x2,y2),(x3,y3)
…
(xn,yn);
51.s4:道路方案生成;具体步骤为:
52.s41,根据s3所述控制点序列集,控制点(xn-1,yn-1)与控制点(xn,yn)之间折角最小的原则遍寻街区场域线段,所述折角最小原则是两个控制点有n种街区场域的连接方式,计算每种连接方式中街区场域各线段之间的夹角总和,取其中夹角总和最小的街区场域连接方式;
53.s42,如图4所示,按照控制点x坐标依次升序,y坐标依次升序的序列,生成地块内横向、纵向干路,获得干路道路网络。
54.根据《gbt51328-2018城市综合交通体系规划标准》中对于无特殊要求的次干路道路红线宽度要求,将次干路拓宽形成20-35m道路红线,在交叉口处生成道路红线倒角,次干路交叉口倒角距离宜为15-20m。
55.s5:道路方案输出;
56.将方案加载至三维展示平台,可通过操纵杆手动增减道路或改变线形,指标随之实时变化;
57.如图5所示,输出生成干路方案与指标评价参数并形成工程报告图纸,采用c3222l/3226无线a3复合机彩色激光打印机打印成文本格式。
58.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
59.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1