基于神经轮廓演化的目标识别方法及系统与流程
1.本发明涉及图像处理识别技术领域,具体涉及基于神经轮廓演化的目标识别方法及系统。
背景技术:
2.神经网络是一种模仿人类神经系统的机器学习模型,深度学习是近年来兴起的基于多层神经网络的机器学习算法。随着计算机运算速度的加快,复杂的深度神经网络不再难以训练,使得深度学习发展迅速,在图像识别领域有着广泛运用。
3.受限玻尔兹曼机(restricted boltzmann machine,rbm)是一种可通过输入数据集学习概率分布的随机生成神经网络。受限玻兹曼机在降维、分类、协同过滤、特征学习和主题建模中得到了应用。根据任务的不同,受限玻兹曼机可以使用监督学习或无监督学习的方法进行训练。
4.图像轮廓检测是计算机视觉中的一项基础而又有挑战性的任务。轮廓广泛存在于图像中物体与背景的边界处,轮廓提取的准确性对于图像分割,物体检测意义重大。由于轮廓处往往伴随着图像亮度的剧烈变化,如何能够较为准确的将目标物体的轮廓从目标图片中提取出来,并进行准确的识别,是需要解决的问题。
技术实现要素:
5.本发明的目的在于提供基于神经轮廓演化的目标识别方法及系统,解决以下技术问题:
6.如何提升基于神经网络的目标识别过程中的轮廓分割精准度。
7.本发明的目的可以通过以下技术方案实现:
8.基于神经轮廓演化的目标识别方法,包括:
9.获取目标图像i中目标物体的形状先验参数;
10.通过基于所述形状先验参数的变分分割模型得到水平集函数
11.根据预设公式计算得到最优分割方案
12.根据所述最优分割方案获得所述目标物体的识别轮廓;
13.对所述识别轮廓在所述目标图像中的区域进行归一化,得到提取图片;
14.对所述提取图片进行分类识别;
15.其中,所述预设公式包括:
[0016][0017]
其中,将条件概率最大时的分割方案作为所述最优分割方案
[0018]
通过上述技术方案,本发明先通过对目标图像i中的目标物体进行分析,得到目标物体对应分类的形状先验参数,根据形状先验参数指导来生成水平集函数以此来对
分割方案进行评估,当条件概率最大时说明当前的分割方案最可能是正确,因此能够保证后续在针对目标物体进行分类识别的过程中,能够拥有更高的识别准确度。
[0019]
作为本发明进一步的方案:所述预设公式包括:
[0020][0021]
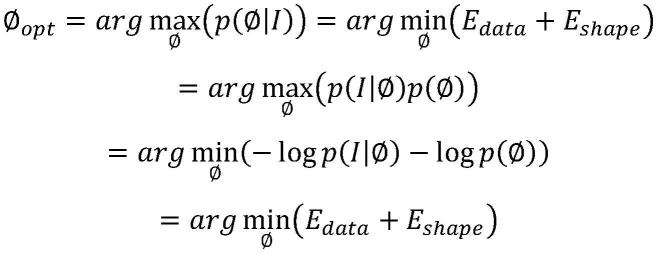
其中,能量项e
data
表征所述目标图像自身的能量,e
shape
表征形状约束项,用于评估当前分割方案下的分割结果在结构上所具有的能量,两者都是能量越大,对应概率越小,说明当前分割结果也就越不可能;故,当e
data
+e
shape
的和达到最小时,前分割方案为最优分割方案。
[0022]
作为本发明进一步的方案:所述预设公式包括:
[0023][0024]
其中,α为加权系数,α>1,用于调节所述最优分割方案的评价标准,α越大,评价标准越高。
[0025]
作为本发明进一步的方案:所述获取目标图像中目标物体的形状先验参数的方法包括:
[0026]
获取目标族数据,所述目标族数据包括目标图像pi、目标形状mi和目标类别标签yi,i为样本序列号;
[0027]
通过受限玻尔兹曼机学习、提取每个目标形状mi和目标类别标签yi的联合特征{hj}
j=1,2...m
;
[0028]
其中,m为受限玻尔兹曼机隐藏层层数,{hj}为各个隐层单元的集合;
[0029]
基于所述联合特征在所述受限玻尔兹曼机的标签层k中学习对形状的识别;
[0030]
其中,mi∈{0,1}
l
×w,l、w、c分别为第i个样本对应的目标图像pi的长、宽和通道数。
[0031]
作为本发明进一步的方案:所述受限玻尔兹曼机的能量表示为:
[0032][0033]
其中,v为所述受限玻尔兹曼机的可视层结点,q为所述受限玻尔兹曼机的可视层单元,q
t
为当前分割结果,bq为所述受限玻尔兹曼机的可视层的偏置参数,bh为所述受限玻尔兹曼机的隐层的偏置参数,bk为所述受限玻尔兹曼机的标签层的偏置参数,w和u均为权重参数;
[0034]
联合特征的状态分布概率为:
[0035][0036]
其中,z=∑
q,h,k
exp(-e(q,h,k))为配分函数;
[0037]
在完成所述学习对形状的识别后,所述受限玻尔兹曼机在隐藏层h中捕捉、提取和保存目标的形状特征,同时在标签层k输出识别结果;
[0038]
当越小时,所述p(q,h,k)越大,当p(q,h,k)大于预设阈值时,将所述当前分割结果作为所述最优分割方案
[0039]
作为本发明进一步的方案:对各图像的最优分割方案对应的像素点进行特征提取,并使用分类模型建立外观表达模型,以表达所述目标物体的形状先验参数。
[0040]
作为本发明进一步的方案:所述归一化包括:
[0041]
从所述识别轮廓中随机挑选像素点作为第一像素点;
[0042]
将所述识别轮廓之外的部分全部替换为第一像素点的像素值;
[0043]
将识别轮廓中的像素统一替换为预设值;
[0044]
然后对替换的区域进行灰度处理。
[0045]
一种基于神经轮廓演化的目标识别系统,包括:
[0046]
获取模块,用于获取目标图像i中目标物体的形状先验参数;
[0047]
生成模块,用于通过基于所述形状先验参数的变分分割模型得到水平集函数
[0048]
处理计算模块,用于根据预设公式计算得到最优分割方案
[0049]
根据所述最优分割方案获得所述目标物体的识别轮廓;
[0050]
对所述识别轮廓在所述目标图像中的区域进行归一化,得到提取图片;
[0051]
识别模块,用于对所述提取图片进行分类识别;
[0052]
其中,所述预设公式包括:
[0053][0054]
其中,将条件概率最大时的分割方案作为所述最优分割方案
[0055]
本发明的有益效果:本发明先通过对目标图像i中的目标物体进行分析,得到目标物体对应分类的形状先验参数,根据形状先验参数指导来生成水平集函数以此来对分割方案进行评估,当条件概率最大时说明当前的分割方案最可能是正确,因此能够保证后续在针对目标物体进行分类识别的过程中,能够拥有更高的识别准确度。
附图说明
[0056]
下面结合附图对本发明作进一步的说明。
[0057]
图1为本发明中目标识别方法的流程示意图;
[0058]
图2为本发明中目标识别系统的魔魁啊结构示意图。
具体实施方式
[0059]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0060]
请参阅图1所示,基于神经轮廓演化的目标识别方法,包括:
[0061]
获取目标图像i中目标物体的形状先验参数;
[0062]
通过基于形状先验参数的变分分割模型得到水平集函数
[0063]
根据预设公式计算得到最优分割方案
[0064]
根据最优分割方案获得目标物体的识别轮廓;
[0065]
对识别轮廓在目标图像中的区域进行归一化,得到提取图片;
[0066]
对提取图片进行分类识别;
[0067]
其中,预设公式包括:
[0068][0069]
其中,将条件概率最大时的分割方案作为最优分割方案
[0070]
通过上述技术方案,本发明先通过对目标图像i中的目标物体进行分析,得到目标物体对应分类的形状先验参数,根据形状先验参数指导来生成水平集函数以此来对分割方案进行评估,当条件概率最大时说明当前的分割方案最可能是正确,因此能够保证后续在针对目标物体进行分类识别的过程中,能够拥有更高的识别准确度。
[0071]
作为本发明进一步的方案:预设公式包括:
[0072][0073]
其中,能量项e
data
表征目标图像自身的能量,典型的能量项包括mumford-shah模型,chan-vese模型等及它们的变体,e
shape
表征形状约束项,用于评估当前分割方案下的分割结果在结构上所具有的能量,两者都是能量越大,对应概率越小,说明当前分割结果也就越不可能;故,当e
data
+e
shape
的和达到最小时,前分割方案为最优分割方案。
[0074]
作为本发明进一步的方案:预设公式包括:
[0075][0076]
其中,α为加权系数,α>1,用于调节最优分割方案的评价标准,α越大,评价标准越高。
[0077]
作为本发明进一步的方案:获取目标图像中目标物体的形状先验参数的方法包括:
[0078]
获取目标族数据,目标族数据包括目标图像pi、目标形状mi和目标类别标签yi,i为样本序列号;
[0079]
通过受限玻尔兹曼机学习、提取每个目标形状mi和目标类别标签yi的联合特征{hj}
j=1,2...m
;
[0080]
其中,m为受限玻尔兹曼机隐藏层层数,{hj}为各个隐层单元的集合;
[0081]
基于联合特征在受限玻尔兹曼机的标签层k中学习对形状的识别;
[0082]
其中,mi∈{0,1}
l
×w,l、w、c分别为第i个样本对应的目标图像pi的长、宽和通道数。
[0083]
在本实施例中,受限玻尔兹曼机(restricted boltzmann machine)本质上就是一个图模型,其中的结点分为两类:可视层结点v和隐藏层结点h。每个可视层结点都与所有隐层结点连接,但是可视层结点之间(以及隐藏层结点之间)互相不连接。可视层与隐藏层的神经元可以是二值(binary)的状态,多值(multinomial)的状态,也可以是连续的值(real-value)。
[0084]
在联合状态为(v,h)的配置下,可视层与隐层单元均为二值的rbm称为bernoulli rbm。在本实施例中,我们使用q代表rbm的可视层单元,h代表隐层单元,k代表标签层单元(即分类的结果),这样训练rbm的目标就变为最大化p
data
(q,k)。那么带标签层的rbm的能量可表示为:
[0085][0086]
其中,v为受限玻尔兹曼机的可视层结点,q为受限玻尔兹曼机的可视层单元,q
t
为当前分割结果,bq为受限玻尔兹曼机的可视层的偏置参数,bh为受限玻尔兹曼机的隐层的偏置参数,bk为受限玻尔兹曼机的标签层的偏置参数,w和u均为权重参数;
[0087]
联合特征的状态分布概率为:
[0088][0089]
其中,z=∑
q,h,k
exp(-e(q,h,k))为配分函数;可视层单元与隐藏层单元我们使用sigmoid作为激活函数,而标签层则使用softmax作为激活函数。
[0090]
在完成学习对形状的识别后,受限玻尔兹曼机在隐藏层h中捕捉、提取和保存目标的形状特征,同时在标签层k输出识别结果;
[0091]
当越小时,p(q,h,k)越大,意味着改分割结果正确的可能性越大,当p(q,h,k)大于预设阈值时,将当前分割结果作为最优分割方案
[0092]
作为本发明进一步的方案:对各图像的最优分割方案对应的像素点进行特征提取,并使用分类模型建立外观表达模型,以表达目标物体的形状先验参数。
[0093]
作为本发明进一步的方案:归一化包括:
[0094]
从识别轮廓中随机挑选像素点作为第一像素点;
[0095]
将识别轮廓之外的部分全部替换为第一像素点的像素值;
[0096]
将识别轮廓中的像素统一替换为预设值;
[0097]
然后对替换的区域进行灰度处理。
[0098]
一种基于神经轮廓演化的目标识别系统,如图2所示,包括:
[0099]
获取模块,用于获取目标图像i中目标物体的形状先验参数;
[0100]
生成模块,用于通过基于形状先验参数的变分分割模型得到水平集函数
[0101]
处理计算模块,用于根据预设公式计算得到最优分割方案
[0102]
根据最优分割方案获得目标物体的识别轮廓;
[0103]
对识别轮廓在目标图像中的区域进行归一化,得到提取图片;
[0104]
识别模块,用于对提取图片进行分类识别;
[0105]
其中,预设公式包括:
[0106][0107]
其中,将条件概率最大时的分割方案作为最优分割方案
[0108]
以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1