胃部标志物的浸润深度检测方法、装置及存储介质与流程
本发明涉及医疗辅助,尤其涉及一种胃部标志物的浸润深度检测方法、装置及存储介质。
背景技术:
1、胃癌是全球第三大致命恶性肿瘤,2018年新增病例超过100万,死亡人数超过78万,从全球角度来看,占癌症相关死亡人数的8.2%。延迟诊断和治疗是胃癌高死亡率的重要原因,早期检测和治疗性治疗是降低死亡率和改善患者病情的关键。
2、胃癌的治疗手段和措施取决于胃癌病变的严重程度判断,其中癌变出现于粘膜层或者粘膜层以下,因此胃癌浸润深度的判断,是进行外科手术治疗或者内镜下治疗的重要判断依据。不同的治疗方法所带来的预后、经济成本等都有很大的不同。因此准确判断患者的胃癌浸润深度是消化临床内镜医师面临的一个难题。
技术实现思路
1、本发明实施例的目的是提供一种胃部标志物的浸润深度检测方法、装置及存储介质,以解决胃癌浸润深度难以准确地检测的技术问题。
2、在第一方面,为实现上述目的,本发明实施例提供了一种胃部标志物的浸润深度检测方法,包括:
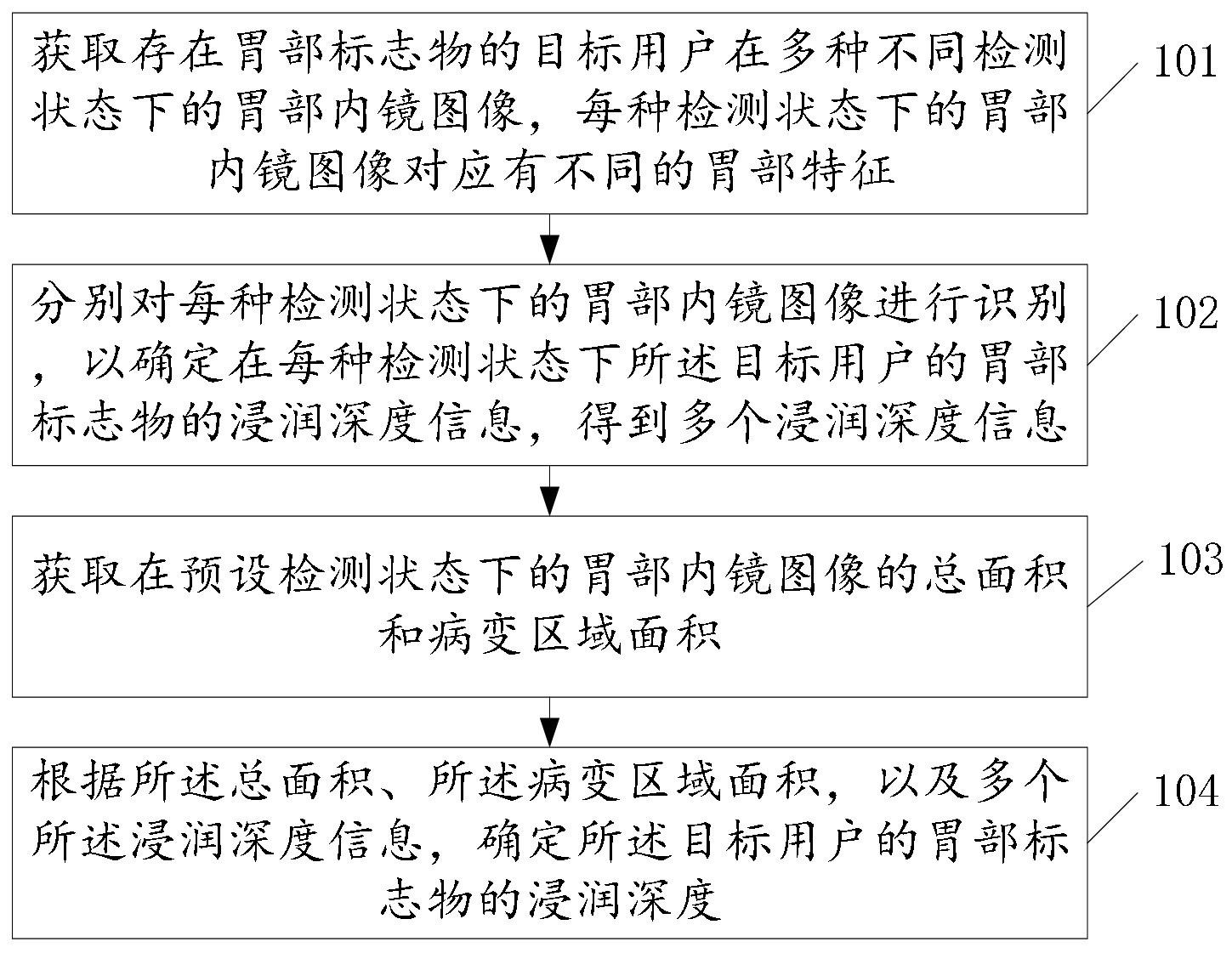
3、获取存在胃部标志物的目标用户在多种不同检测状态下的胃部内镜图像,每种检测状态下的胃部内镜图像对应有不同的胃部特征;
4、分别对每种检测状态下的胃部内镜图像进行识别,以确定在每种检测状态下所述目标用户的胃部标志物的浸润深度信息,得到多个浸润深度信息;
5、获取在预设检测状态下的胃部内镜图像的总面积和病变区域面积;
6、根据所述总面积、所述病变区域面积,以及多个所述浸润深度信息,确定所述目标用户的胃部标志物的浸润深度。
7、进一步的,所述在多种不同检测状态下的胃部内镜图像包括在第一检测状态下的第一胃部内镜图像、在第二检测状态下的第二胃部内镜图像以及在第三检测状态下的第三胃部内镜图像,所述胃部特征包括形态特征、颜色特征以及结构特征,所述浸润深度信息包括胃部内镜图像对应的胃部标志物的浸润深度分别为第一浸润深度和第二浸润深度的置信度信息;
8、所述分别对每种检测状态下的胃部内镜图像进行识别,以确定在每种检测状态下所述目标用户的胃部标志物的浸润深度信息,得到多个浸润深度信息,包括:
9、根据所述第一胃部内镜图像的形态特征对所述第一胃部内镜图像进行识别,得到所述第一胃部内镜图像对应的胃部标志物的浸润深度分别为第一浸润深度的第一置信度信息和第二浸润深度的第二置信度信息;
10、根据所述第二胃部内镜图像的颜色特征对所述第二胃部内镜图像进行识别,得到所述第二胃部内镜图像对应的胃部标志物的浸润深度分别为第一浸润深度的第三置信度信息和第二浸润深度的第四置信度信息;
11、根据所述第三胃部内镜图像的结构特征对所述第三胃部内镜图像进行识别,得到所述第三胃部内镜图像对应的胃部标志物的浸润深度分别为第一浸润深度的第五置信度信息和第二浸润深度的第六置信度信息。
12、进一步的,所述根据所述第三胃部内镜图像的结构特征对所述第三胃部内镜图像进行识别,得到所述第三胃部内镜图像对应的胃部标志物的浸润深度分别为第一浸润深度的第五置信度信息和第二浸润深度的第六置信度信息,包括:
13、对所述第三胃部内镜图像进行检测,确定所述第三胃部内镜图像中的病变区域;
14、对所述第三胃部内镜图像中的胃部结构进行分层处理,得到构成所述胃部结构的多层膜层;
15、根据所述病变区域、所述多层膜层之间的位置关系对所述第三胃部内镜图像进行识别,得到所述第三胃部内镜图像对应的胃部标志物的浸润深度分别为第一浸润深度的第五置信度信息和第二浸润深度的第六置信度信息。
16、进一步的,所述第一浸润深度包括黏膜内癌的浸润深度,第二浸润深度包括黏膜下癌的浸润深度,所述多层膜层包括粘膜层、粘膜肌层、粘膜下层、固有肌层以及浆膜层;
17、所述对所述第三胃部内镜图像进行检测,确定所述第三胃部内镜图像中的病变区域,包括:
18、将所述第三胃部内镜图像输入至训练好的目标检测模型,以使所述训练好的目标检测模型对所述第三胃部内镜图像中的病变区域进行检测,确定所述第三胃部内镜图像中的病变区域;
19、其中,所述训练好的目标检测模型根据胃部的胃部内镜图像及对应的标注有病变区域的标注图像构成的训练集训练得到的;
20、所述对所述第三胃部内镜图像中的胃部结构进行分层处理,得到构成所述胃部结构的多层膜层,包括:
21、将所述第三胃部内镜图像输入至训练好的图像分割模型,以使所述训练好的图像分割模型根据所述第三胃部内镜图像的结构特征对所述第三胃部内镜图像进行分割,得到所述第三胃部内镜图像中构成胃部结构的粘膜层、粘膜肌层、粘膜下层、固有肌层以及浆膜层;
22、其中,所述训练好的图像分割模型根据在所述第三检测状态下的胃部内镜图像及对应的标注有胃部结构膜层的标注图像构成的训练集训练得到的;
23、所述根据所述病变区域、所述多层膜层之间的位置关系对所述第三胃部内镜图像进行识别,得到所述第三胃部内镜图像对应的胃部标志物的浸润深度分别为第一浸润深度的第五置信度信息和第二浸润深度的第六置信度信息,包括:
24、将所述第三胃部内镜图像输入至训练好的第三胃部标志物的浸润深度识别模型,以使所述训练好的第三胃癌浸润深度识别模型根据所述第三胃部内镜图像的位置关系对所述第三胃部内镜图像进行识别,得到所述第三胃部内镜图像对应的胃部标志物的浸润深度分别为黏膜内癌的第五置信度信息和黏膜下癌的第六置信度信息;
25、其中,所述训练好的第三胃部标志物的浸润深度识别模型根据在所述第三检测状态下的胃部内镜图像及对应的标注浸润深度构成的训练集训练得到的。
26、进一步的,所述根据所述第一胃部内镜图像的形态特征对所述第一胃部内镜图像进行识别,得到所述第一胃部内镜图像对应的胃部标志物的浸润深度分别为第一浸润深度的第一置信度信息和第二浸润深度的第二置信度信息,包括:
27、将所述第一胃部内镜图像输入至训练好的第一胃部标志物的浸润深度识别模型,以使所述训练好的第一胃部标志物的浸润深度识别模型根据所述第一胃部内镜图像的形态特征对所述第一胃部内镜图像进行识别,得到所述第一胃部内镜图像对应的胃部标志物的浸润深度分别为黏膜内癌的第一置信度信息和黏膜下癌的第二置信度信息;
28、其中,所述训练好的第一胃部标志物的浸润深度识别模型根据在所述第一检测状态下的胃部内镜图像及对应的标注浸润深度构成的训练集训练得到的;
29、所述根据所述第二胃部内镜图像的颜色特征对所述第二胃部内镜图像进行识别,得到所述第二胃部内镜图像对应的胃部标志物的浸润深度分别为第一浸润深度的第三置信度信息和第二浸润深度的第四置信度信息,包括:
30、将所述第二胃部内镜图像输入至训练好的第二胃部标志物的浸润深度识别模型,以使所述训练好的第二胃部标志物的浸润深度识别模型根据所述第二胃部内镜图像的颜色特征对所述第二胃部内镜图像进行识别,得到所述第二胃部内镜图像对应的胃部标志物的浸润深度分别为黏膜内癌的第三置信度信息和黏膜下癌的第四置信度信息;
31、其中,所述训练好的第二胃部标志物的浸润深度识别模型根据在所述第二检测状态下的胃部内镜图像及对应的标注浸润深度构成的训练集训练得到的。
32、进一步的,所述第一检测状态为白光检测状态、所述第二检测状态为光变检测状态、所述第三检测状态为超声检测状态,所述预设检测状态为所述白光检测状态、所述光变检测状态以及所述超声检测状态中的任一检测状态;
33、所述获取在预设检测状态下的胃部内镜图像的总面积和病变区域面积,包括:
34、根据在预设检测状态下的胃部内镜图像的长和宽,确定在预设检测状态下的胃部内镜图像的总面积;
35、调用所述训练好的目标检测模型,对预设检测状态下的胃部内镜图像进行检测,以确定在预设检测状态下的胃部内镜图像的病变区域;
36、根据所述病变区域,计算所述病变区域的病变区域面积。
37、进一步的,所述根据所述总面积、所述病变区域面积,以及多个所述浸润深度信息,确定所述目标用户的胃部标志物的浸润深度,包括:
38、确定所述总面积与所述病变区域面积之比的比值;
39、将所述总面积、所述比值、所述黏膜内癌的第一置信度信息、第三置信度信息、第五置信度信息,以及所述黏膜下癌的第二置信度信息、第四置信度信息、第六置信度信息,输入至训练好的胃部标志物的浸润深度拟合模型,以使所述训练好的胃部标志物的浸润深度拟合模型对所述总面积、所述比值、所述黏膜内癌的第一置信度信息、第三置信度信息、第五置信度信息,以及所述黏膜下癌的第二置信度信息、第四置信度信息、第六置信度信息进行拟合处理,得到所述目标用户的胃部标志物的浸润深度;
40、其中,所述训练好的胃部标志物的浸润深度拟合模型包括随机森林和决策树。
41、在第二方面,为了解决相同的技术问题,本发明实施例提供了一种胃部标志物的浸润深度检测装置,包括:
42、第一获取模块,用于获取存在胃部标志物的目标用户在多种不同检测状态下的胃部内镜图像,每种检测状态下的胃部内镜图像对应有不同的胃部特征;
43、识别模块,用于分别对每种检测状态下的胃部内镜图像进行识别,以确定在每种检测状态下所述目标用户的胃部标志物的浸润深度信息,得到多个浸润深度信息;
44、第二获取模块,用于获取在预设检测状态下的胃部内镜图像的总面积和病变区域面积;
45、确定模块,用于根据所述总面积、所述病变区域面积,以及多个所述浸润深度信息,确定所述目标用户的胃部标志物的浸润深度。
46、在第三方面,为了解决相同的技术问题,本发明实施例提供了一种电子设备,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述存储器与所述处理器耦接,且所述处理器执行所述计算机程序时,实现上述任一项所述的胃部标志物的浸润深度检测方法中的步骤。
47、在第四方面,为了解决相同的技术问题,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在的设备执行上述任一项所述的胃部标志物的浸润深度检测方法中的步骤。
48、本发明实施例提供了一种胃部标志物的浸润深度检测方法、装置及存储介质,该方法通过获取存在胃部标志物的目标用户在多种不同检测状态下的胃部内镜图像,能够确定在每种检测状态下目标用户的胃部标志物的多个浸润深度信息,并根据在预设检测状态下的胃部内镜图像的总面积和胃部内镜图像中病变区域面积,以及在多种检测状态下的多个浸润深度信息,能够全面地、精准地确定目标用户的胃部标志物的浸润深度,解决胃癌浸润深度难以准确地检测的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!