一种基于双目视觉的绝缘子空间定位方法与流程
本发明涉及绝缘子定位冲洗,特别涉及一种基于双目视觉的绝缘子空间定位方法。
背景技术:
1、绝缘子水冲洗装置是对铁路接触网绝缘子进行水冲洗的装置,绝缘子水冲洗装置的清洗车以5km/h的时速前进,在经过支撑杆时,触发装置会进行触发,触发后相机会自动拍摄并回图,此时需要得到绝缘子的空间坐标,启动水炮对该位置进行清洗。因此需要从图片中检测到绝缘子的位置,并通过绝缘子在图片上的位置计算其在现实三维空间中的位置。其一是需要目标检测的准确性,要求不出现误报和漏报现象;另一个是定位的准确性,考虑到绝缘子的大小以及相机距离绝缘子的距离,要求对绝缘子的定位误差在5cm以内。同时,由于车是边走边洗,若触发后相隔很长一段时间,则定位的结果在车辆的行驶方向上会有较大误差。以车的行驶速度为5km/h为例,即差不多1.4m/s,若算法的延迟是500ms,则在算法返回结果时,车辆已经在原来的位置上行驶了0.7m,从而导致喷不准的现象。
技术实现思路
1、本发明提供了一种基于双目视觉的绝缘子空间定位方法,从相机获取的原始图像中识别检测到绝缘子,并通过绝缘子的图像位置求解绝缘子的空间坐标,能够精确的获取到绝缘子的位置,避免冲洗时喷淋不准的现象发生。
2、本发明提供了一种基于双目视觉的绝缘子空间定位方法,包括:
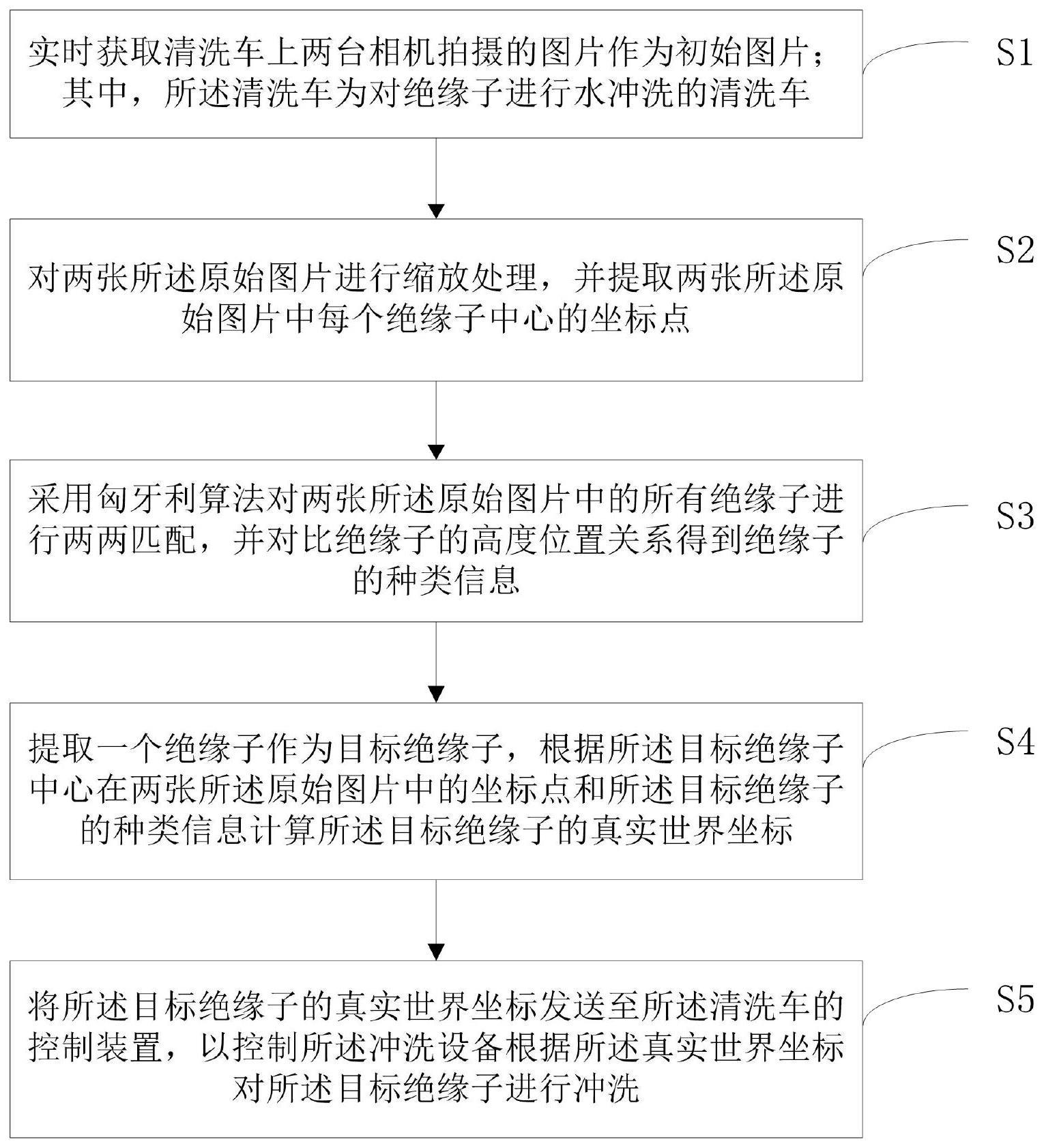
3、实时获取清洗车上两台相机拍摄的图片作为初始图片;其中,所述清洗车为对绝缘子进行水冲洗的清洗车;
4、对两张所述原始图片进行缩放处理,并提取两张所述原始图片中每个绝缘子中心的坐标点;
5、采用匈牙利算法对两张所述原始图片中的所有绝缘子进行两两匹配,并对比绝缘子的高度位置关系得到绝缘子的种类信息;
6、提取一个绝缘子作为目标绝缘子,根据所述目标绝缘子中心在两张所述原始图片中的坐标点和所述目标绝缘子的种类信息计算所述目标绝缘子的真实世界坐标;
7、将所述目标绝缘子的真实世界坐标发送至所述清洗车的控制装置,以控制所述冲洗设备根据所述真实世界坐标对所述目标绝缘子进行冲洗。
8、进一步地,所述对两张所述原始图片进行缩放处理,并提取两张所述原始图片中每个绝缘子中心的坐标点的步骤,包括:
9、将两张所述原始图片缩放至640*640;
10、以所述原始图片每个单位像素作为坐标的单位距离,提取一个绝缘子的横坐标x和纵坐标y,所述横坐标x为所述原始图片从左往右或从右往左第x个像素,所述纵坐标y为所述原始图片从上往下或从下往上第y个像素;
11、遍历两张所述原始图片中的每个绝缘子,得到两张所述原始图片中每个绝缘子中心的坐标点。
12、进一步地,所述提取一个绝缘子作为目标绝缘子,根据所述目标绝缘子中心在两张所述原始图片中的坐标点和所述目标绝缘子的种类信息计算所述目标绝缘子的真实世界坐标的步骤,包括:
13、提取一个绝缘子作为目标绝缘子,根据小孔成像模型,假设所述目标绝缘子在相机a的坐标为(ua,va),在相机b的坐标为(ub,vb),在真实世界的坐标为(xw,yw,zw);其中,两台相机分别为相机a和相机b;
14、计算两台相机的对应投影点坐标(ua′,va′)和(ub′,vb′);
15、采用最小二乘法对目标函数进行优化求解,并当目标函数的值最小时,得到空间坐标x,y,z)为目标绝缘子的真实世界坐标。
16、进一步地,所述计算两台相机的对应投影点坐标(ua′,va′)和(ub′,vb′)的步骤中,计算公式为:
17、
18、
19、其中,为相机a的内参和两个外参,为相机b的内参和两个外参,λa为投影点与相机a的距离,λb为投影点与相机b的距离。
20、进一步地,所述采用最小二乘法对目标函数进行优化求解,并当目标函数的值最小时,得到空间坐标(x,y,z)为目标绝缘子的真实世界坐标的步骤中,目标函数为:
21、min(ua-ua′)2+(va-va′)2+(ub-ub′)2+(vb-vb′)2
22、其中,假设绝缘子的世界坐标为(x,y,z),由于以及为已知的相机内外参,,通过公式得到假设点对应的相机投影点坐标(ua′,va′和(ub′,vb′),当真实相机坐标(ua,va)和(ub′,vb′)与(ua′,va′)和(ub′,vb′)距离最近,确定假设点世界坐标(x,y,z)为绝缘子的真实坐标。
23、进一步地,所述将所述目标绝缘子的真实世界坐标发送至所述清洗车的控制装置,以控制所述冲洗设备根据所述真实世界坐标对所述目标绝缘子进行冲洗的步骤之前,还包括:
24、根据所述清洗车上两台相机的安装位置对所述真实世界坐标中的z值进行反向调整。
25、进一步地,所述将所述目标绝缘子的真实世界坐标发送至所述清洗车的控制装置,以控制所述冲洗设备根据所述真实世界坐标对所述目标绝缘子进行冲洗的步骤之后,包括:
26、存储两张所述原始图片,以及两张所述原始图片中所有绝缘子的真实世界坐标。
27、本发明还提供了一种基于双目视觉的绝缘子空间定位装置,包括:
28、获取模块,用于实时获取清洗车上两台相机拍摄的图片作为初始图片;其中,所述清洗车为对绝缘子进行水冲洗的清洗车;
29、提取模块,用于对两张所述原始图片进行缩放处理,并提取两张所述原始图片中每个绝缘子中心的坐标点;
30、匹配模块,用于采用匈牙利算法对两张所述原始图片中的所有绝缘子进行两两匹配,并对比绝缘子的高度位置关系得到绝缘子的种类信息;
31、计算模块,用于提取一个绝缘子作为目标绝缘子,根据所述目标绝缘子中心在两张所述原始图片中的坐标点和所述目标绝缘子的种类信息计算所述目标绝缘子的真实世界坐标;
32、发送模块,用于将所述目标绝缘子的真实世界坐标发送至所述清洗车的控制装置,以控制所述冲洗设备根据所述真实世界坐标对所述目标绝缘子进行冲洗。
33、本发明还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述方法的步骤。
34、本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述方法的步骤。
35、本发明的有益效果为:
36、实时获取清洗车上两台相机拍摄的图片作为初始图片,根据两张所述原始图片提取两张每个绝缘子中心的坐标点,采用匈牙利算法对所有绝缘子进行两两匹配,并对比绝缘子的高度位置关系得到绝缘子的种类信息,以实现从图像中识别检测到绝缘子;根据绝缘子中心在两张所述原始图片中的坐标点和种类信息计算绝缘子的真实世界坐标,最后将真实世界坐标发送至所述清洗车的控制装置,以控制冲洗设备根据所述真实世界坐标对所述目标绝缘子进行冲洗,提升定位准确定,避免冲洗时喷淋不准的现象发生。
技术特征:
1.一种基于双目视觉的绝缘子空间定位方法,其特征在于,包括:
2.根据权利要求1所述的基于双目视觉的绝缘子空间定位方法,其特征在于,所述对两张所述原始图片进行缩放处理,并提取两张所述原始图片中每个绝缘子中心的坐标点的步骤,包括:
3.根据权利要求1所述的基于双目视觉的绝缘子空间定位方法,其特征在于,所述提取一个绝缘子作为目标绝缘子,根据所述目标绝缘子中心在两张所述原始图片中的坐标点和所述目标绝缘子的种类信息计算所述目标绝缘子的真实世界坐标的步骤,包括:
4.根据权利要求3所述的基于双目视觉的绝缘子空间定位方法,其特征在于,所述计算两台相机的对应投影点坐标(ua′,va′)和(ub′,vb′)的步骤中,计算公式为:
5.根据权利要求4所述的基于双目视觉的绝缘子空间定位方法,其特征在于,所述采用最小二乘法对目标函数进行优化求解,并当目标函数的值最小时,得到空间坐标(x,y,z)为目标绝缘子的真实世界坐标的步骤中,目标函数为:
6.根据权利要求1所述的基于双目视觉的绝缘子空间定位方法,其特征在于,所述将所述目标绝缘子的真实世界坐标发送至所述清洗车的控制装置,以控制所述冲洗设备根据所述真实世界坐标对所述目标绝缘子进行冲洗的步骤之前,还包括:
7.根据权利要求1所述的基于双目视觉的绝缘子空间定位方法,其特征在于,所述将所述目标绝缘子的真实世界坐标发送至所述清洗车的控制装置,以控制所述冲洗设备根据所述真实世界坐标对所述目标绝缘子进行冲洗的步骤之后,包括:
8.一种基于双目视觉的绝缘子空间定位装置,其特征在于,包括:
9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述方法的步骤。
技术总结
本发明涉及绝缘子定位冲洗技术领域,公开了一种基于双目视觉的绝缘子空间定位方法,包括:实时获取清洗车上两台相机拍摄的图片作为初始图片;对两张原始图片进行缩放处理,并提取每个绝缘子中心的坐标点;采用匈牙利算法对所有绝缘子进行两两匹配,并对比高度位置关系得到种类信息;根据目标绝缘子中心的坐标点和种类信息计算所述目标绝缘子的真实世界坐标;发送至清洗车的控制装置,以控制冲洗设备根据真实世界坐标对目标绝缘子进行冲洗。本发明提供的基于双目视觉的绝缘子空间定位方法,从相机获取的原始图像中识别检测到绝缘子,并通过绝缘子的图像位置求解绝缘子的空间坐标,能够精确的获取到绝缘子的位置,避免冲洗时喷淋不准的现象发生。
技术研发人员:林杰,刘信风,齐世强,王茜,张纯,刘威
受保护的技术使用者:湖南华宏铁路高新科技开发有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!