基于竹子定律和熵的哈里斯鹰机制图像分割方法
本发明涉及一种基于竹子定律和熵的哈里斯鹰机制的k均值聚类图像分割方法,属于图像处理领域。
背景技术:
1、图像分割是把图像分成若干个特定的、具有独特性质的区域并提出感兴趣目标的技术和过程。它是由图像处理到图像分析的关键步骤。现有的图像分割方法主要分以下几类:基于阈值的分割方法、基于区域的分割方法、基于边缘的分割方法以及基于特定理论的分割方法等。从数学角度来看,图像分割是将数字图像划分成互不相交的区域的过程。图像分割的过程也是一个标记过程,即把属于同一区域的像素赋予相同的编号。常见的图像分割方法有最大类间方差法、最大熵法、最小交叉熵法和k均值聚类法等。近几年来,基于各种群智能方法的图像分割技术逐渐兴起,这类方法使图像分割的速度、分割效果和鲁棒性都有了较大的提升。因此设计一种收敛速度快、收敛精度高并且鲁棒性强的的高精度图像分割方法有重要的理论价值和意义。
2、经过对文献的查找,李海洋等在《图学学报》(2014,vol.35,no.05,pp.755-761)发表的“基于随机权重粒子群和k-均值聚类的图像分割”提出了一种基于随机权重粒子群优化和k-均值聚类的图像分割方法,在充分利用k-均值聚类简单、实时性高的优点的同时改善了其容易陷入局部最优解的缺点,达到了较为理想的分割结果。但由于粒子群算法是一种被较早提出的群智能算法,其收敛速度和收敛精度都存在明显的不足,即使对算法进行相应改进,但其仍不能找到最优的聚类初值。李鹏等在《国外电子测量技术》(2022,vol.41,no.7,pp.9-17)发表的“基于logistic映射的果蝇算法优化otsu图像分割方法”中提出了一种利用logistic混沌映射和高斯游走策略改进果蝇优化算法并将算法应用于otsu阈值分割法用于图像分割。该方法在实现对果蝇算法改进的同时将改进的算法用于传统otsu图像分割方法进行改进,一定程度上改善了传统otsu方法在处理图像时分割精度低、实时性差的缺陷。但由于otsu方法作为一种传统的基于阈值的图像分割方法,其分割原理上仅以灰度作为分割的标准,因此该方法存在当背景和目标大小比例悬殊时分割效果不好和对噪声敏感等问题。leena samantaray等在《revue d'intelligence artificielle》(2020,vol.34,no.5,pp.541-551)发表的“a new harris hawks-cuckoo search optimizer formultilevel thresholding of thermogram images”提出了一种混合哈里斯鹰算法和布谷鸟算法的融合算法分别改进了otsu法和kapur熵法用于图像分割,均取得了较好的分割效果。融合了哈里斯鹰算法和布谷鸟算法的混合算法结合两种提出时间较晚的群智能算法对原始的哈里斯鹰算法进行了改进,改进算法在收敛速度和收敛精度上都有一些提升,但该方法未考虑图像的空间特征,因此在分割效果上仍有待提升。
3、已有的文献表明,多阈值分割方法较为常见的是将一些传统的群智能方法如灰狼方法、麻雀方法和鲸鱼方法等方法或其改进方法与广泛使用的基本图像分割方法如otsu、最大熵法、tsallis熵法等结合起来,并将单阈值分割方法推广至多阈值。这些方法均存在收敛速度较慢和应用于图像分割领域时分割的精度不够理想等问题。将一些近几年提出的群智能方法如哈里斯鹰方法等引入图像分割领域对上述问题会有所改善,但由于一些新提出的方法本身也存在上述问题,因此需针对其应用于图像分割时存在的问题进行多方面的有效改进。而基于聚类的图像分割方法虽然提高了分割的精确度,但初始聚类中心的选取对分割效果有较大影响且容易陷入局部最优解,同时聚类的迭代过程延长了图像分割所需的时间。要达到智能优化方法快速收敛和图像分割精度高的目标,则需要设计一些新的演化方法,发明一种可行有效的高精度图像分割方法。本发明是在k均值聚类法进行图像分割的基础上,设计一种基于竹子定律和熵的哈里斯鹰机制进行k均值聚类法的初值选取从而提出一种图像分割的新方法。
技术实现思路
1、本发明的目的是为了解决现有基于群智能图像分割技术分割精度不够和收敛速度较慢的难题,进而提供一种收敛速度更快和有效性更高并可以进行工程问题求解的有更广泛应用的基于竹子定律和熵的哈里斯鹰机制。本发明将竹子定律和哈里斯鹰机制相结合并用于设计哈里斯鹰机制过渡阶段的能量方程,使求解机制更符合大自然生物的猎捕规律,在全局探索和局部开采两个阶段更能达到有效的平衡。在全局探索阶段使用熵对哈里斯鹰种群进行变异,减小陷入局部最优解的可能。相较于一些基于已有传统群智能的图像分割方法,所设计基于竹子定律和熵的哈里斯鹰机制图像分割方法拥有更快的收敛速度、更高的收敛精度、更高的分割精度和更好的鲁棒性。
2、本发明的目的是这样实现的:步骤如下:
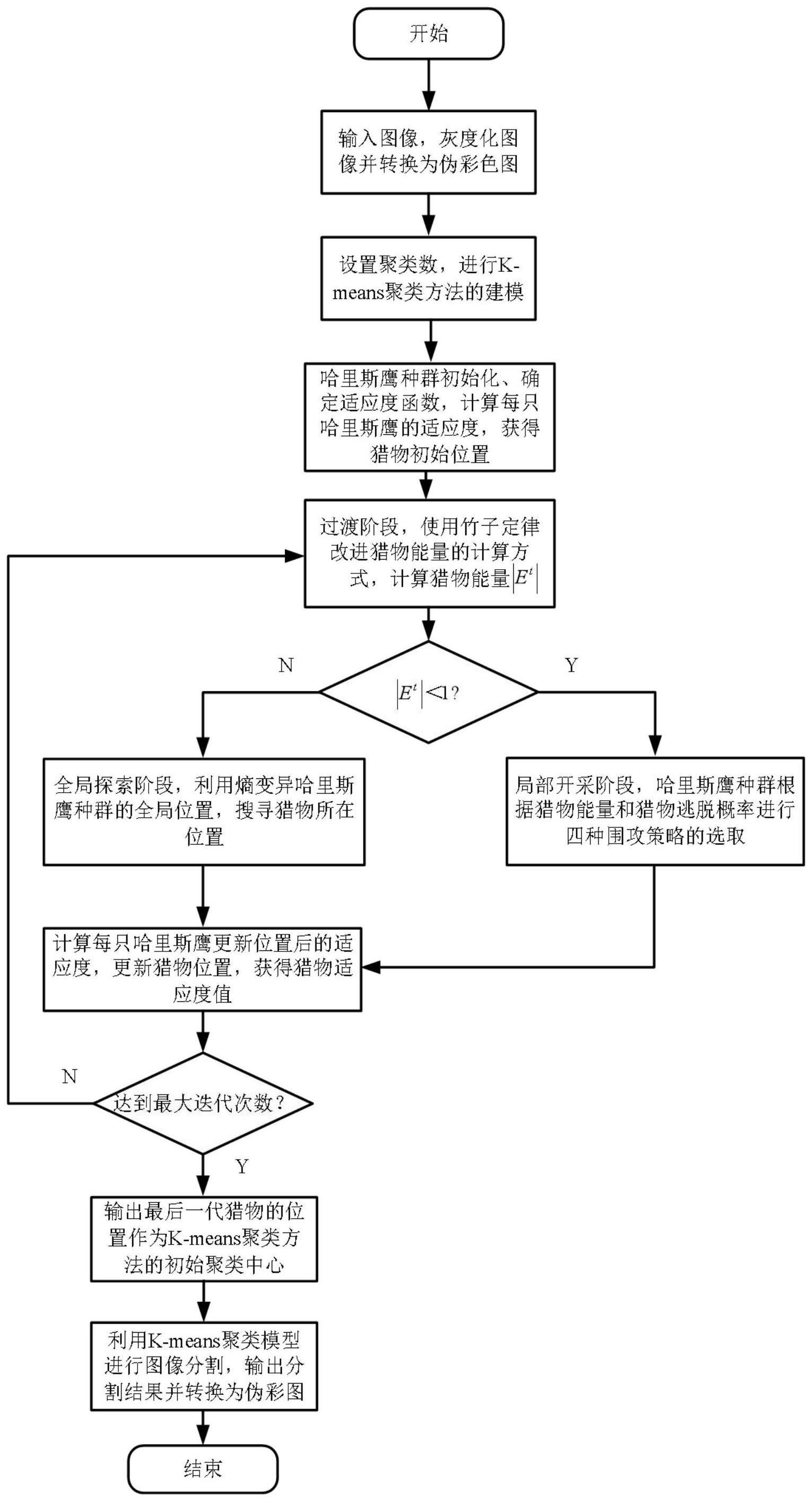
3、步骤一:输入图像,灰度化图像并转换为伪彩色图;
4、步骤二:设置聚类数,进行k-means聚类方法的建模;
5、步骤三:初始化哈里斯鹰种群中每个个体的位置和猎物能量,将k-means聚类方法的损失函数作为基于竹子定律和熵的哈里斯鹰机制的适应度函数,计算适应度值,获得猎物的初始位置;
6、步骤四:过渡阶段,使用竹子定律改进猎物的能量,通过猎物能量判断哈里斯鹰种群将进入全局探索阶段还是局部开发阶段;
7、步骤五:全局探索阶段,利用熵变异哈里斯鹰种群的全局位置,每只哈里斯鹰在给定的区间范围内搜寻最优解;
8、步骤六:局部开采阶段,在局部开采阶段,哈里斯鹰将根据猎物的能量et和猎物逃脱的概率进行软围攻、硬围攻、渐进式快速俯冲软围攻和渐进式快速俯冲硬围攻四种不同的围攻策略选取;
9、步骤七:计算每只哈里斯鹰更新位置后的适应度,更新猎物位置;
10、将第t+1次迭代中第i只哈里斯鹰的位置代入适应度函数中计算相应的适应度值,记录第t+1次迭代哈里斯鹰的最优位置。若第t+1次迭代哈里斯鹰的最优位置适应度值优于第t猎物的适应度值,则第t+1次迭代的猎物位置等于第t+1次迭代哈里斯鹰的最优位置;否则,则第t+1次迭代的猎物位置等于第t次迭代的猎物位置;
11、步骤八:判断是否达到其最大迭代次数t,若未达到,令t=t+1,返回步骤四继续迭代;否则,输出最优位置;
12、步骤九:将最后一代的猎物位置作为k-means聚类方法的初始聚类中心,使用步骤二中所述的模型进行聚类,将每一聚类簇中的所有像素点以其聚类中心的灰度值来替代来重构该图像实现图像分割,并按照步骤一的映射规则将分割后的灰度图像转换为伪彩色图。
13、进一步地,步骤一具体为:提取灰度图像中像素点的个数row×col和通道数ctype,设灰度级取值范围为[0,m-1],第i个像素点表示为mi,其中row和col分别代表图像中像素点的行数和列数,m表示为灰度级的数目,l=row×col表示全部像素点的个数;将图像数据类型转换为双精度浮点类型并归一化到[0,1]之间;每个通道通过对不同的灰度级采用不同的映射函数将灰度图像转换为伪彩色图。
14、进一步地,步骤二具体为:设置聚类数为k,第次循环k均值聚类的聚类中心为为聚类模型中的循环次数;
15、(1)设样本集为i=[m1,m2,…,ml],设置本模型中最大循环次数为t1,允许最大误差为emax,第j个聚类簇为cj,j=1,2,...,k,将聚类簇初始设置为为空集;
16、(2)对于计算第个像素点样本和第j个聚类中心的欧氏距离:设标记第次循环最小的所对应的类别为λ,λ∈{1,2,...,k},则更新cλ,令
17、(3)对cj中所有的样本点重新计算第次循环的聚类中心cj为第j个聚类簇cj所包含的样本数,计算误差
18、(4)若或结束聚类,输出聚类结果c={c1,c2,…,ck},否则令返回(2)继续循环,直到满足聚类结束的条件。
19、进一步地,步骤三具体为:设置哈里斯鹰种群中的哈里斯鹰个体数目为n,最大迭代次数为t,下界r=[r1,r2,...,rd],上界u=[u1,u2,...,ud],其中d为最大维度,d=k×ctype;定义为在第t次迭代时第i只哈里斯鹰的位置,初始化第1代第i只哈里斯鹰第d维位置为其中为(1,n)之间的随机数,d=1,2,...,d,ud为第d维的上界,rd为第d维的下界;
20、将步骤二中所述的样本集每隔l个像素点选取一个像素点作为聚类候选点,设聚类候选点的集合为即和l为正整数,
21、将k-means聚类方法的损失函数作为适应度函数;为哈里斯鹰个体计算适应度值的公式,i=1,2,...,n,t∈[1,t];为猎物在第t次迭代时的位置,其代表第t次迭代最优解所在的位置;将哈里斯鹰个体的位置代入上述适应度计算公式,获得每只哈里斯鹰的初始适应度值,适应度值越小越优秀,将初始种群中适应度值最优的哈里斯鹰的位置设置为猎物的初始位置。
22、进一步地,步骤四为:将猎物的能量变化划分为两个阶段:指数型下降阶段和上升—稳定阶段;由三年与六周的时间关系得到前一阶段占总迭代次数的97%,后一阶段占总迭代次数的3%。当第一阶段结束时迭代即将进入尾声,此时猎物由于即将被哈里斯鹰捕食,会激发出本能的求生欲,猎物的能量会有小规模的提升,将后一阶段猎物的能量设为线性增长;但是猎物的能量增长是有一定限度的,因此达到某一阈值后猎物的能量会保持稳定直到迭代结束;根猎物的能量由以下表达式定义:式中et为第t次迭代时猎物的能量,是在第t次迭代时选取的(0,1)之间的随机数,随迭代次数变化而变化;当et≥1时哈里斯鹰进入全局探索阶段,反之哈里斯鹰则进入局部开采阶段。
23、进一步地,步骤五为:在全局探索阶段,哈里斯鹰种群将在定义区间内搜索猎物,在迭代开始之前先利用熵变异哈里斯鹰种群中每只哈里斯鹰的位置,提高全局探索能力,具体的变异方法如下:
24、计算第t代第i只哈里斯鹰的适应度概率获得第t代哈里斯鹰种群的熵为得到哈里斯鹰种群的熵后,根据熵的值设置变异步长,对每一只哈里斯鹰的位置进行变更;设置变异步长的计算公式为:其中hmax=log2n,exp()代表以自然常数e为底的指数函数,变异后第i只哈里斯鹰的位置为其中和分别为第t次迭代选取的(0,α1)之间的随机数和(0,α2)之间的随机数,α3是(0,1)之间常数;
25、完成每只哈里斯鹰个体位置的变异后,按照如下规则来进行第i只哈里斯鹰位置的更新:其中是第i只哈里斯鹰在第t+1次迭代时的位置,和是(0,1)区间内生成的随机数,β1为(0,1)之间的常数,abs()是对括号中各维变量取绝对值的函数,是第次迭代时随机选取的第m只哈里斯鹰的位置,是第次迭代哈里斯鹰种群的平均位置,其表达式为:
26、进一步地,步骤六为:哈里斯鹰根据猎物的能量和逃脱概率来选择四种不同的围攻方式对猎物进行围猎:|et|≥α4时猎物有足够的能量逃跑,α4是能量控制常数,哈里斯鹰执行软围攻,否则哈里斯鹰执行硬围攻。第t次迭代对于第i只哈里斯鹰,产生(0,1)之间的均匀随机数如果时,猎物易逃脱,α5是逃脱概率控制常数;反之猎物不易逃脱;
27、当且|et|≥α4时,第i只哈里斯鹰进行软围攻,按照如下方式来进行位置的更新:其中表示第t次迭代中猎物位置与第i只哈里斯鹰位置差值,是权重参数,是(0,1)之间的随机数,jt用于模拟兔子的跳跃强度;
28、当且|et|<α4时,第i只哈里斯鹰进行硬围攻,按照如下方式来进行位置的更新:
29、当|et|≥α4且时,第i只哈里斯鹰进行渐进式快速俯冲软围攻,按照如下方式来进行位置的更新:其中为第i个随机位置,第t次迭代时第i个随机位置的第d维为选取的(1,d)之间的随机数,d=1,2,...,d,lf(d)为levy飞行函数;
30、当|et|<α4且时,第i只哈里斯鹰进行渐进式快速俯冲硬围攻,按照如下方式来进行位置的更新:
31、与现有技术相比,本发明的有益效果是:传统的哈里斯鹰机制存在收敛速度慢、收敛精度低、易陷入局部最优解等问题。针对这些问题,本发明提出了一种基于竹子定律和熵的改进方法,从多个方面对哈里斯鹰机制进行了改进。在过度阶段,使用竹子定律对猎物逃逸时的能量进行改进。本发明将原方法猎物能量的下降规律由线型改为指数型,并引入竹子定律对猎物逃逸能量进行分段改进。在迭代过程的前一阶段猎物能量呈指数型下降,当迭代进入尾声时猎物即将被哈里斯鹰捕食,此时激发猎物的求生本能,进入迭代的后一阶段,猎物能量会进行小幅度线性提升,直至一个峰值后保持稳定。此种能量计算方法使本发明更符合自然界捕食者追捕猎物的规律,并且经仿真验证能增加方法的收敛性。在全局探索阶段,使用熵对哈里斯鹰种群进行全局变异。利用熵的特性进行变异算子的设计,在哈里斯鹰种群的熵较低时进行较大步长的变异,增加了种群的多样性,有利于哈里斯鹰种群跳出局部最优区域,更好的搜索潜在区域;在哈里斯鹰种群的熵较高时进行较小步长的变异,从而提高搜索速度,避免错过最优解。传统图像分割方法一般为单阈值分割,将单阈值分割推广至多阈值分割的方法存在时间复杂度大、分割效果不稳定等问题。k-means聚类分析方法虽然用于图像分割时的分割效果尚可,但由于初始的聚类中心是随机选取的,因此要达到一个较小的误差,其计算时间长,收敛速度慢且容易陷入局部最优解。在经过群智能方法优化后,其收敛速度明显提升。在k-means聚类方法设置相同的最大迭代次数的条件下,基于竹子定律和熵的哈里斯鹰机制相比原始的哈里斯鹰机制和一些经典的群体智能优化方法如粒子群机制的分割效果在峰值信噪比、均方根误差和结构相似度三个指标的衡量下展示出的分割结果都更加优秀,可以表现出本发明在图像分割领域具有比较强的实用价值。
- 还没有人留言评论。精彩留言会获得点赞!