一种路沿跟踪方法、装置、设备和存储介质与流程
本申请涉及交通,特别是涉及一种路沿跟踪方法、装置、设备和存储介质。
背景技术:
1、车辆行驶过程中对周围环境的感知是实现车辆智能辅助驾驶与无人驾驶的基础,路沿检测技术是实现车辆智能路径规划和决策控制的重要环节,也是实现车道保持辅助(lane keeping assist,lka)和车道偏离预警(lane departure warning,ldw)等辅助驾驶的基础。
2、现有路沿检测技术通常是获取车辆所在道路的当前道路场景照片,并从当前道路场景照片中检测出路沿。然而,采用此种路沿检测策略,不能根据实时的路沿状况做出调整,导致路沿检测的准确性较低。
技术实现思路
1、为了解决现有技术中存在的上述技术问题,本申请提供一种路沿跟踪方法、装置、设备和存储介质。
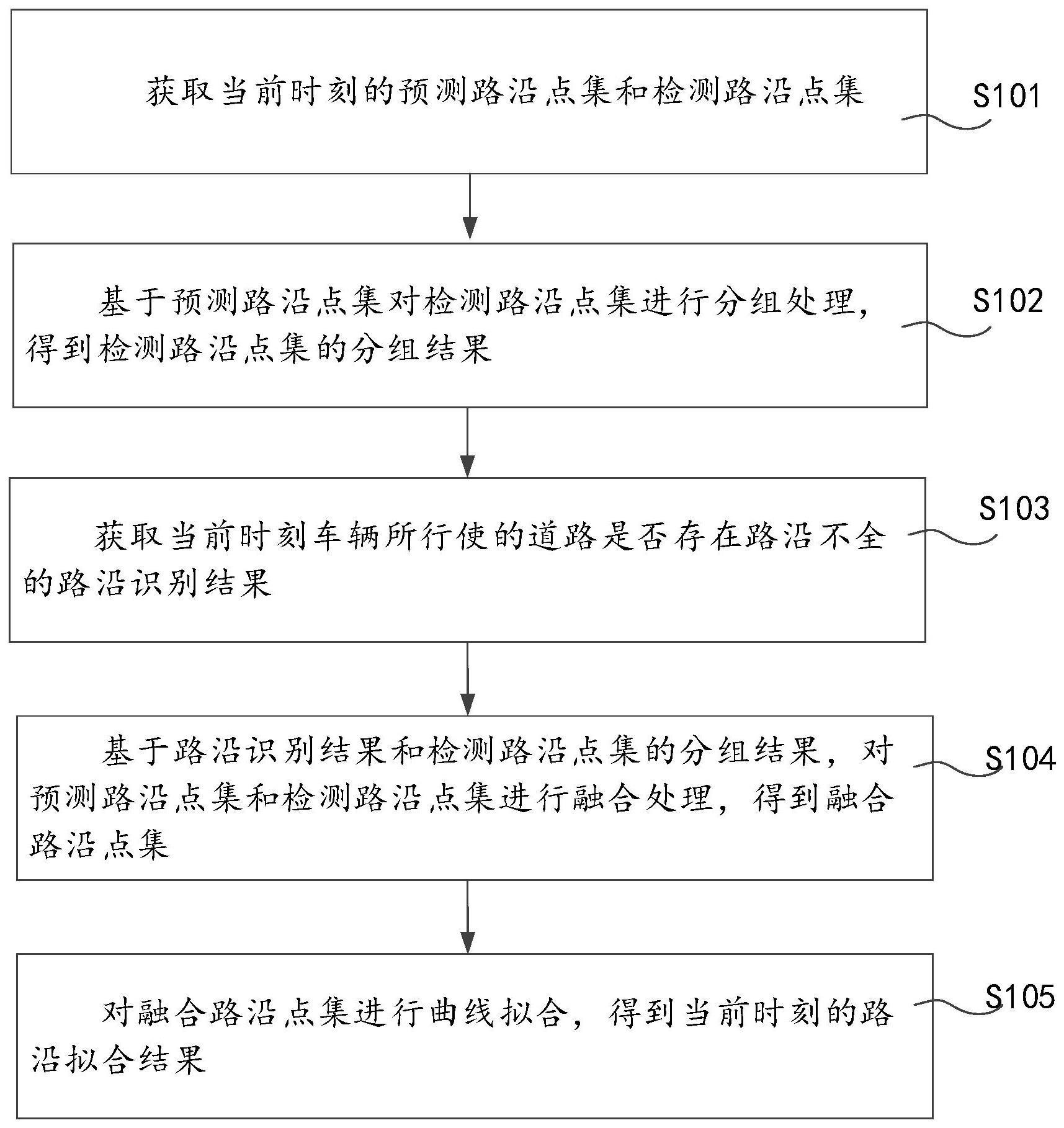
2、为解决上述问题,本申请提供了一种路沿跟踪方法,路沿跟踪方法包括:获取当前时刻的预测路沿点集和检测路沿点集;基于所述预测路沿点集对所述检测路沿点集进行分组处理,得到所述检测路沿点集的分组结果;获取当前时刻车辆所行使的道路是否存在路沿不全的路沿识别结果;基于所述路沿识别结果和所述检测路沿点集的分组结果,对所述预测路沿点集和所述检测路沿点集进行融合处理,得到融合路沿点集;对所述融合路沿点集进行曲线拟合,得到当前时刻的路沿拟合结果。
3、为解决上述问题,本申请提供了一种路沿拟合装置,路沿拟合装置包括:获取模块、分组模块、融合模块以及拟合模块;所述获取模块用于获取当前时刻的预测路沿点集和检测路沿点集;所述分组模块用于基于所述预测路沿点集对所述检测路沿点集进行分组处理,得到所述检测路沿点集的分组结果;所述获取模块用于获取当前时刻车辆所行使的道路是否存在路沿不全的路沿识别结果;所述融合模块用于基于所述路沿识别结果和所述检测路沿点集的分组结果,对所述预测路沿点集和所述检测路沿点集进行融合处理,得到融合路沿点集;所述拟合模块用于对所述融合路沿点集进行曲线拟合,得到当前时刻的路沿拟合结果。
4、为解决上述问题,本申请提供了一种路沿拟合设备,路沿拟合设备包括:处理器和存储器,所述存储器中存储有计算机程序,所述处理器用于执行所述计算机程序以实现上述的方法。
5、为解决上述问题,本申请提供了一种计算机可读存储介质,其上存储有程序指令,所述程序指令被处理器执行时实现上述的方法。
6、与现有技术相比,本申请的路沿跟踪方法包括:获取当前时刻的预测路沿点集和检测路沿点集;基于预测路沿点集对检测路沿点集进行分组处理,得到检测路沿点集的分组结果;获取当前时刻车辆所行使的道路是否存在路沿不全的路沿识别结果;基于路沿识别结果和检测路沿点集的分组结果,对预测路沿点集和检测路沿点集进行融合处理,得到融合路沿点集;对融合路沿点集进行曲线拟合,得到当前时刻的路沿拟合结果。通过上述实施方式,同时参考路沿识别结果和检测路沿点集的分组结果,以对预测路沿点集和检测路沿点集进行融合处理,然后再对融合路沿点进行曲线拟合,从而可以根据识别出的检测路沿点变换与否,以及路沿是否被遮挡和缺失来融合预测路沿点集和检测路沿点集,使得复杂路况中的路沿也能稳定、准确地被跟踪出来,鲁棒性好。
7、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非限制本申请。
技术特征:
1.一种路沿跟踪方法,其特征在于,所述路沿跟踪方法包括:
2.根据权利要求1所述的路沿跟踪方法,其特征在于,所述基于所述路沿识别结果和所述检测路沿点集的分组结果,对所述预测路沿点集和所述检测路沿点集进行融合处理,包括:
3.根据权利要求2所述的路沿跟踪方法,其特征在于,所述基于所述路沿识别结果和所述检测路沿点集的分组结果,确定所述预测路沿点集和所述检测路沿点集各自的融合权重,包括:
4.根据权利要求2所述的路沿跟踪方法,其特征在于,所述基于所述路沿识别结果和所述检测路沿点集的分组结果,确定所述预测路沿点集和所述检测路沿点集各自的融合权重,包括:
5.根据权利要求2所述的路沿跟踪方法,其特征在于,所述基于所述路沿识别结果和所述检测路沿点集的分组结果,确定所述预测路沿点集和所述检测路沿点集各自的融合权重,包括:
6.根据权利要求2所述的路沿跟踪方法,其特征在于,所述基于所述路沿识别结果和所述检测路沿点集的分组结果,确定所述预测路沿点集和所述检测路沿点集各自的融合权重,包括:
7.根据权利要求1-6任意一项所述的路沿跟踪方法,其特征在于,所述基于所述预测路沿点集对所述检测路沿点集进行分组处理,得到所述检测路沿点集的分组结果,包括:
8.根据权利要求7所述的路沿跟踪方法,其特征在于,所述基于距离比较结果确定所述检测路沿点集的分组结果中是否存在新生路沿点集,包括:
9.根据权利要求7所述的路沿跟踪方法,其特征在于,所述从所述检测路沿点集中选取一个未计算过距离值的目标路沿点与所述预测路沿点集中的左路沿预测点集计算距离得到左路沿距离值,以及与所述预测路沿点集中的右路沿点集计算距离得到右路沿距离值,包括:
10.根据权利要求1-6任意一项所述的路沿跟踪方法,其特征在于,所述获取当前时刻的预测路沿点集,包括:
11.根据权利要求1-6任意一项所述的路沿跟踪方法,其特征在于,所述对所述融合路沿点集进行曲线拟合,得到当前时刻的路沿拟合结果,包括:
12.一种路沿拟合装置,其特征在于,包括:获取模块、分组模块、融合模块以及拟合模块;
13.一种路沿拟合设备,其特征在于,包括:处理器和存储器,所述存储器中存储有计算机程序,所述处理器用于执行所述计算机程序以实现权利要求1至11中任一项所述的方法。
14.一种计算机可读存储介质,其上存储有程序指令,其特征在于,所述程序指令被处理器执行时实现权利要求1至11任一项所述的方法。
技术总结
本申请公开了一种路沿跟踪方法、装置、设备和存储介质。路沿跟踪方法包括获取当前时刻的预测路沿点集和检测路沿点集;基于预测路沿点集对检测路沿点集进行分组处理,得到检测路沿点集的分组结果;获取当前时刻车辆所行使的道路是否存在路沿不全的路沿识别结果;基于路沿识别结果和检测路沿点集的分组结果,对预测路沿点集和检测路沿点集进行融合处理,得到融合路沿点集;对融合路沿点集进行曲线拟合,得到当前时刻的路沿拟合结果。通过上述实施方式,可以根据识别出的检测路沿点变换与否,以及路沿是否被遮挡和缺失来融合预测路沿点集和检测路沿点集,使得复杂路况中的路沿也能稳定、准确地被跟踪出来,鲁棒性好。
技术研发人员:熊驰,陈宏峰,华智,方伟业
受保护的技术使用者:浙江零跑科技股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!