虚拟模型展示方法、解算方法和可读存储介质与流程
本发明涉及增强现实,特别涉及一种虚拟模型展示方法、解算方法和可读存储介质。
背景技术:
1、现有ar设备无厘米级高精度定位能力。呈现虚拟模型或场景时需要人工手动将虚拟模型或场景和现实进行虚实融合。或通过采集现实图像、点云等特征来将虚拟模型或场景和现实进行虚实融合。
2、现有技术中基于人工或者特征点云的方式实现虚实融合,具体地,具有如下缺陷。
3、1.人工手动将虚拟模型或场景和现实进行虚实融合时,操作繁琐。
4、2.人工手动将虚拟模型或场景和现实进行虚实融合时,人工操作时不可避免的在定位对齐时引入误差。
5、3.人工手动将虚拟模型或场景和现实进行虚实融合时,需要操作人员具备大量相关经验。
6、4.通过采集现实图像、点云特征来将虚拟模型或场景和现实进行虚实融合时,需采集现实的图像或点云数据,采集点云数据需要特定且昂贵的激光扫描仪等lidar(激光雷达)设备。普通ar设备不具备点云扫描能力。
7、5.通过采集现实图像、点云特征来将虚拟模型或场景和现实进行虚实融合时,处理这些数据需要大量的数据传输和计算能力。普通ar设备不具备此数据传输和计算能力。
8、6.通过采集现实图像、点云特征来将虚拟模型或场景和现实进行虚实融合时,现实世界时刻在动态变化。有可能导致虚实融合存在误差或虚实融合失败。
9、总之,现有技术中将虚拟模型或场景和现实进行虚实融合时,存在误差大或者成本高的问题,容易造成虚实融合失败。
技术实现思路
1、本发明的目的在于提供一种虚拟模型展示方法、解算方法和可读存储介质,以解决现有技术中存在的虚实融合误差大或者成本高,容易造成虚实融合失败的问题。
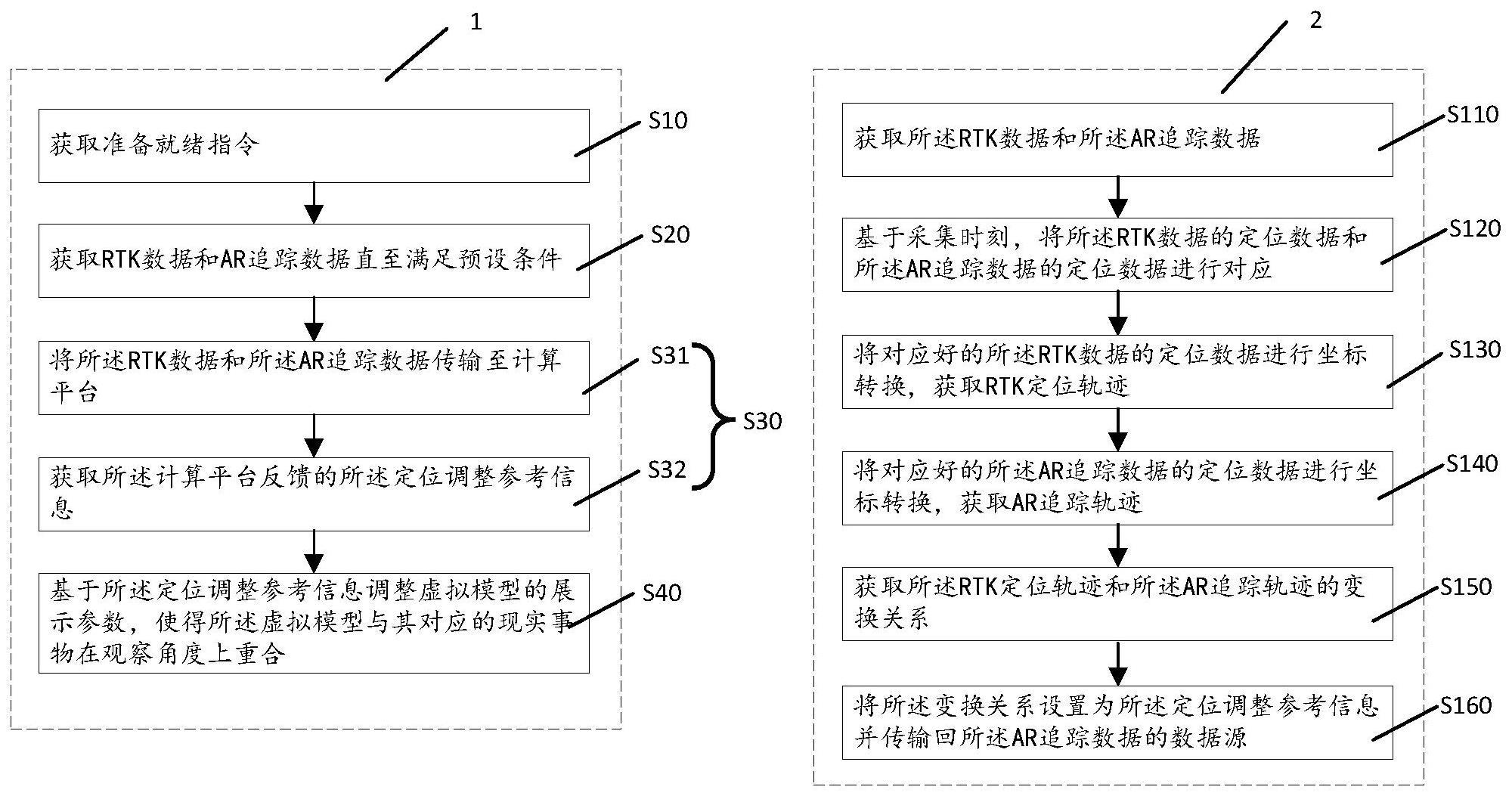
2、为了解决上述技术问题,根据本发明的第一个方面,提供了一种虚拟模型展示方法,所述虚拟模型展示方法包括:获取准备就绪指令,所述准备就绪指令指示rtk设备和ar设备已经刚性连接,所述准备就绪指令由外部输入;获取rtk数据和ar追踪数据直至满足预设条件,其中,所述rtk数据基于所述rtk设备的rtk定位功能获取,所述ar追踪数据基于所述ar设备获取;所述rtk数据包括定位数据和采集时刻,所述ar追踪数据包括定位数据和采集时刻;获取基于所述rtk数据和所述ar追踪数据解算得到的定位调整参考信息;基于所述定位调整参考信息调整虚拟模型的展示参数,使得所述虚拟模型与其对应的现实事物在观察角度上重合,其中,所述展示参数包括所述虚拟模型的三维平移向量和三维旋转角度。
3、可选的,所述获取基于所述rtk数据和所述ar追踪数据解算得到的定位调整参数的步骤包括:将所述rtk数据和所述ar追踪数据传输至计算平台,所述计算平台设置于远程或者本地;获取所述计算平台反馈的所述定位调整参考信息。
4、可选的,所述计算平台在获取所述rtk数据和所述ar追踪数据之后,执行如下步骤:基于采集时刻,将所述rtk数据的定位数据和所述ar追踪数据的定位数据进行对应;将对应好的所述rtk数据的定位数据进行坐标转换,获取rtk定位轨迹;将对应好的所述ar追踪数据的定位数据进行坐标转换,获取ar追踪轨迹;获取所述rtk定位轨迹和所述ar追踪轨迹的变换关系;将所述变换关系设置为所述定位调整参考信息并传输回所述ar追踪数据的数据源。
5、可选的,所述获取所述rtk定位轨迹和所述ar追踪轨迹的变换关系的步骤包括:改变所述变换关系的参数和/或结构,计算基于所述变换关系转换后的所述ar追踪轨迹与所述rtk定位轨迹的偏差,使得所述偏差最小的参数和/或结构作为计算结果。
6、可选的,所述基于所述定位调整参考信息调整虚拟模型的展示参数的步骤包括:基于所述变换关系对当前的所述展示参数进行变换计算。
7、可选的,所述预设条件包括:所述rtk数据和所述ar追踪数据的采集时长超过预设时长和/或所述rtk设备和所述ar设备的位移超过预设距离。
8、可选的,所述预设条件包括:获取采集完成指令,所述采集完成指令由外部输入。
9、可选的,所述ar追踪数据基于机器视觉算法生成。
10、为了解决上述技术问题,根据本发明的第二个方面,提供了一种解算方法,所述解算方法包括:获取rtk数据和ar追踪数据,其中,所述rtk数据基于rtk设备的rtk定位功能获取,所述ar追踪数据基于ar设备获取;所述rtk设备和所述ar设备刚性连接;所述rtk数据包括定位数据和采集时刻,所述ar追踪数据包括定位数据和采集时刻;基于采集时刻,将所述rtk数据的定位数据和所述ar追踪数据的定位数据进行对应;将对应好的所述rtk数据的定位数据进行坐标转换,获取rtk定位轨迹;将对应好的所述ar追踪数据的定位数据进行坐标转换,获取ar追踪轨迹;获取所述rtk定位轨迹和所述ar追踪轨迹的变换关系;将所述变换关系设置为所述定位调整参考信息并传输回所述ar追踪数据的数据源。
11、为了解决上述技术问题,根据本发明的第三个方面,提供了一种可读存储介质,所述可读存储介质上存储有第一程序和/或第二程序;所述第一程序运行时,执行上述的虚拟模型展示方法;所述第二程序运行时,执行上述的解算方法。
12、与现有技术相比,本发明提供的一种虚拟模型展示方法、解算方法和可读存储介质中,所述虚拟模型展示方法包括:基于刚性连接的rtk设备和ar设备获取rtk数据和ar追踪数据;获取基于所述rtk数据和所述ar追踪数据解算得到的定位调整参考信息;基于所述定位调整参考信息调整虚拟模型的展示参数,使得所述虚拟模型与其对应的现实事物在观察角度上重合,其中,所述展示参数包括所述虚拟模型的三维平移向量和三维旋转角度。如此配置,利用rtk装置的测量精度以弥补ar设备的追踪精度不足的缺陷,从而得到精度较高的虚实融合效果,同时对于算力或者操作人员的要求不高,降低了虚实融合的实现成本,解决了现有技术中存在的技术问题。
技术特征:
1.一种虚拟模型展示方法,其特征在于,所述虚拟模型展示方法包括:
2.根据权利要求1所述的虚拟模型展示方法,其特征在于,所述获取基于所述rtk数据和所述ar追踪数据解算得到的定位调整参数的步骤包括:
3.根据权利要求1所述的虚拟模型展示方法,其特征在于,所述计算平台在获取所述rtk数据和所述ar追踪数据之后,执行如下步骤:
4.根据权利要求3所述的虚拟模型展示方法,其特征在于,所述获取所述rtk定位轨迹和所述ar追踪轨迹的变换关系的步骤包括:
5.根据权利要求3所述的虚拟模型展示方法,其特征在于,所述基于所述定位调整参考信息调整虚拟模型的展示参数的步骤包括:
6.根据权利要求1所述的虚拟模型展示方法,其特征在于,所述预设条件包括:所述rtk数据和所述ar追踪数据的采集时长超过预设时长和/或所述rtk设备和所述ar设备的位移超过预设距离。
7.根据权利要求1所述的虚拟模型展示方法,其特征在于,所述预设条件包括:获取采集完成指令,所述采集完成指令由外部输入。
8.根据权利要求1所述的虚拟模型展示方法,其特征在于,所述ar追踪数据基于机器视觉算法生成。
9.一种解算方法,其特征在于,所述解算方法包括:
10.一种可读存储介质,其特征在于,所述可读存储介质上存储有第一程序和/或第二程序;所述第一程序运行时,执行如权利要求1~8中任一项所述的虚拟模型展示方法;所述第二程序运行时,执行如权利要求9所述的解算方法。
技术总结
本发明提供了一种虚拟模型展示方法、解算方法和可读存储介质。所述虚拟模型展示方法包括:基于刚性连接的RTK设备和AR设备获取RTK数据和AR追踪数据;获取基于所述RTK数据和所述AR追踪数据解算得到的定位调整参考信息;基于所述定位调整参考信息调整虚拟模型的展示参数,使得所述虚拟模型与其对应的现实事物在观察角度上重合,其中,所述展示参数包括所述虚拟模型的三维平移向量和三维旋转角度。如此配置,利用RTK装置的测量精度以弥补AR设备的追踪精度不足的缺陷,从而得到精度较高的虚实融合效果,同时对于算力或者操作人员的要求不高,降低了虚实融合的实现成本,解决了现有技术中存在的技术问题。
技术研发人员:刘琛,赵志伟,胡涛
受保护的技术使用者:上海巡智科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!