用于自动驾驶加速测试的关键边缘测试场景在线生成方法
本发明涉及自动驾驶,尤其是涉及一种用于自动驾驶加速测试的关键边缘测试场景在线生成方法。
背景技术:
1、随着自动驾驶技术的发展,近年来自动驾驶测试方法也得到了越来越多的重视,大量的研究人员付出了很多努力来加速自动驾驶的测试,从而促进自动驾驶车辆的实际应用部署。基于场景的测试方法得到了研究人员的广泛关注,智能驾驶测试的关键步骤是找到符合自然分布且关键的测试场景。只有全面覆盖各种场景,才能有效解决自动驾驶面临的安全性以及智能性等问题。然而,从计算上来说,搜索所有可能遇到的交通场景以找到关键的测试场景是不可行的,因为自然交通环境包含成千上万的参数组合。如何提高关键测试场景的生成效率和多样性已成为一个重要问题。现实世界中的驾驶场景非常复杂和多样,它包含各种结构类型的静态道路环境以及各种类型的动态交通参与者。由于现实世界中有无限多的可能场景,场景生成技术必须提供广泛的变化,以解决无限多的场景。测试场景的关键是有效再现真实世界场景的复杂性和可变性,以确保智能驾驶测试的效率和有效性。
2、现有的自动驾驶汽车的测试场景主要包括典型场景和关键场景两类,如表1所示。前者包含大量的低风险场景,主要测试汽车各项常规功能的实现情况。后者主要扩大了测试场景集中的高风险场景比例,实现对典型场景的补充,进一步提高了测试场景的覆盖率,通常用于自动驾驶汽车的安全性测试,寻找使得自动驾驶汽车介于发生事故和不发生事故之间的边界场景,进而指导优化自动驾驶汽车的鲁棒性和安全性。
3、表1典型场景和关键场景对比
4、
5、
6、在以往的自动驾驶测试场景的生成方法中,重点关注于高风险的碰撞场景的生成,比如采用对抗等方法使得测试自动驾驶车辆发生碰撞,但这些生成的测试场景只能对自动驾驶车辆的安全性进行测试,而无法对自动驾驶车辆的综合性能进行全面测试。此外,现有的方法主要关注均匀采样场景和动态交通场景的生成,很少综合考虑静态关键测试场景和动态关键测试场景的生成,这必然会影响自动驾驶车辆的测试效率以及测试场景的多样性。并且现有的关键场景生成方法很少考虑场景的复杂度,很难生成具有不同复杂度级别的测试场景。上述缺陷会在一定程度上影响到自动驾驶车辆的加速测试效率,无法测试到自动驾驶车辆的性能边界(指没有发生碰撞的自动驾驶车辆的性能极限)。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种用于自动驾驶加速测试的关键边缘测试场景在线生成方法,能够在线生成满足自然交通流行为分布、多样性且具有多重交互的关键边界测试场景,以对自动驾驶车辆的性能边界进行测试。
2、本发明的目的可以通过以下技术方案来实现:一种用于自动驾驶加速测试的关键边缘测试场景在线生成方法,包括以下步骤:
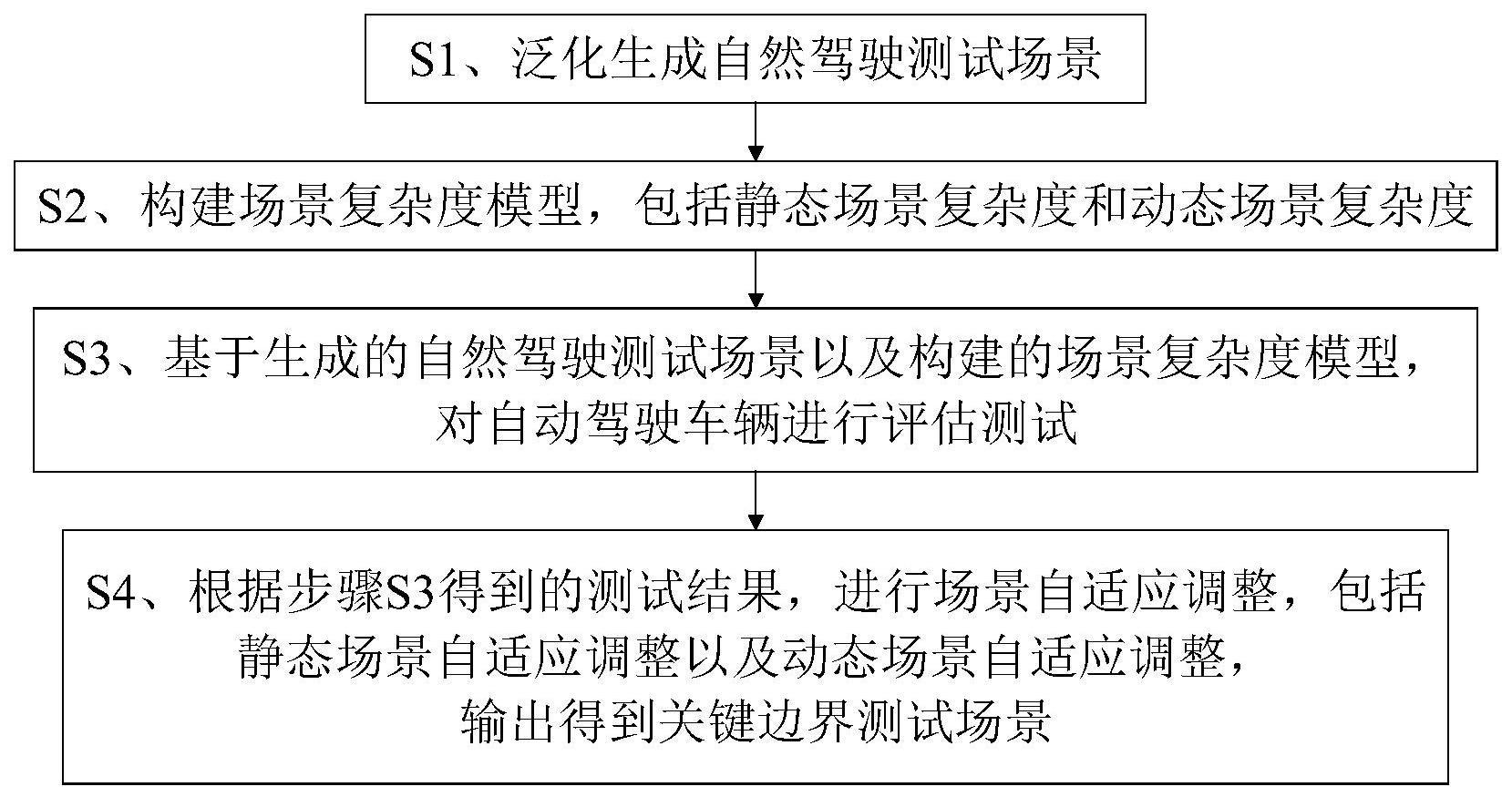
3、s1、泛化生成自然驾驶测试场景;
4、s2、构建场景复杂度模型,包括静态场景复杂度和动态场景复杂度;
5、s3、基于生成的自然驾驶测试场景以及构建的场景复杂度模型,对自动驾驶车辆进行评估测试;
6、s4、根据步骤s3得到的测试结果,进行场景自适应调整,包括静态场景自适应调整以及动态场景自适应调整,输出得到关键边界测试场景。
7、进一步地,所述步骤s1的具体过程为:
8、s11、对真实世界的驾驶环境进行环境识别,将静态交通环境和天气环境转换为静态交通场景;
9、s12、对真实世界的驾驶环境进行行为识别,获得动态交通参与者的自然驾驶行为分布模型;
10、s13、在仿真平台上将自然交通场景进行泛化、并转换为自然驾驶测试场景。
11、进一步地,所述步骤s13具体是利用自然驾驶环境中的自然驾驶数据进行参数泛化,生成opendrive以及openscenario格式的仿真测试场景。
12、进一步地,所述步骤s2中场景复杂度模型具体为:
13、c=αscs+αdcd
14、其中,αs和αd分别是静态场景复杂度cs和动态场景复杂度cd的权重系数。
15、进一步地,所述步骤s2中静态场景复杂度的量化维度包括可行驶区域的面积、天气能见度和道路摩擦系数;
16、动态场景复杂度的量化关键变量包括被测自动驾驶车辆与周围其他交通参与者之间的遭遇角、相对距离和相对速度。
17、进一步地,所述静态场景复杂度具体为:
18、
19、其中,amax为可行驶区域的最大面积,amin为可行驶区域的最小面积,wmax为照明和清晰度最好时的能见度距离,wmin为照明和透明度最差时的能见度距离,fmax为最干燥情况下的道路摩擦系数,fmin为最潮湿的道路情况下的道路摩擦系数,γd、γv、γf分别对应为可行驶区域面积ad、天气能见度wv和道路摩擦系数fr的权重系数。
20、进一步地,所述动态场景复杂度的计算过程具体为:
21、首先设置自动驾驶车辆周围潜在复杂度交通参与者的有效范围;
22、然后计算动态交互对的复杂度,所述交互对由被测的自动驾驶车辆和周围的交通参与者组成;
23、最后,综合考虑所有交互对的复杂度,以计算动态交通场景的复杂度;
24、所述自动驾驶车辆周围潜在复杂度交通参与者的有效范围是以车辆后轴中心点为中心的半圆来描述,该半圆的半径为:
25、rrange=max{rsafe,rl}
26、
27、其中,rrange为自动驾驶车辆的影响区域半径,rsafe为被测自动驾驶车辆的安全区半径,rl为路口区域范围的长度,v0为自动驾驶车辆的初始速度,τ为自动驾驶车辆的响应滞后时间,和分别为自动驾驶车辆的最大加速度和最小减速度;
28、所述动态交互对的复杂度为:
29、ci,0=γ(θi,0,di,0,vi,0)=f1(θi,0)×f2(di,0)×f3(vi,0)
30、
31、
32、
33、
34、
35、其中,ci,0为动态交通参与者之间复杂度,θi,0为动态交通参与者之间的相遇角,di,0为动态交通参与者之间的相对距离,vi,0为动态交通参与者之间的相对速度,f1(θi,0)为相遇角θi,0与动态交互复杂度ci,0之间的关系,f2(di,0)为相对距离di,0与动态交互复杂度ci,0之间的关系,f3(vi,0)为相对速度vi,0与动态交互复杂度ci,0之间的关系,d′i,0为标准化后的相对距离,di,0为不同交通参与者之间的相对距离,dmin为最不复杂情况下的相对距离,等于自动驾驶车辆的影响区域半径rrange,dmax为最复杂情况下的相对距离、等于零,表示两辆车无限接近,v′i,0为标准化后的相对速度,vi,01为不同交通参与者之间的相对速度,vmin为最不复杂情况下的相对速度,等于3.5m/s的发散相对速度,vmax为最复杂情况下的相对速度,等于3.5m/s的收敛相对速度;
36、所述动态交通场景的复杂度为:
37、
38、
39、其中,cd为动态场景复杂度,ct为在时间步长t处平滑之前的集成的动态场景复杂度,n为影响区域范围内的车辆对的数量,λi为交通参与者i的影响,ci,0为交互对集合en+1的复杂度,k表示滑动窗口的长度。
40、进一步地,所述步骤s4具体包括以下步骤:
41、s41、根据步骤s3得到的测试结果,确定当前测试场景属于安全关键测试场景、关键边缘测试场景还是需要进一步自适应优化的测试场景;
42、如果属于安全关键测试场景,则将生成的场景放入安全关键测试场景库中;
43、如果属于关键边缘测试场景,则将生成的场景放入关键边缘测试场景库中;
44、如果不满足所需场景的要求,则执行步骤s42;
45、s42、通过关键边缘测试场景自适应生成算法进一步在线自适应调整和优化当前的测试场景,其中,关键边缘测试场景自适应生成算法从静态场景和动态场景两个角度同时进行场景的自适应优化:
46、静态场景的自适应优化从可行驶区域、天气能见度和道路摩擦系数三个方面进行;
47、动态交通场景的自适应优化是通过选择主要其他对抗交通参与者,对其进行自然和对抗的行为优化来实现的;
48、在进行静态场景和动态交通场景自适应优化的过程中还利用场景复杂度模型对优化后的场景复杂度进行量化,基于场景复杂度提升系数来自适应提升测试场景的复杂度和危险度,最终生成具有不同复杂度级别的、用于不同维度性能测试的、覆盖各种场景的关键测试场景库。
49、进一步地,所述步骤s42中进行静态场景自适应优化的具体过程为:
50、首先,根据真实交通环境的地理坐标gc和距离阈值dth,从openstreetmap(osm)中提取路网数据;
51、数据提取后,生成静态交通场景,并进行后处理,然后,通过参数向量rit对静态交通场景进行参数化,其中参数向量定义为rit=[ps,vs,wv,fr]t,ps和vs分别表示静态障碍物的位置和大小,利用初始状态向量r0初始化静态交通场景,再基于生成的场景来测试自动驾驶车辆,并获得轨迹数据ts和相应的测试结果;
52、最后,利用可达状态集来计算可行驶区域的面积:
53、
54、x(rit,u(t),t)表示测试的自动驾驶车辆在时间t的运动状态,u(t)表示车辆在时间t的动作,proj(x)将车辆的状态x投影到二维位置域,alane\o(rit)表示不包含静态障碍物o(rit)的二维空间;
55、为了提高静态场景的临界性,优化参数向量rit以获得临界静态交通场景sstatic(it+1)用于第it+1次智能驾驶测试:
56、
57、s.t.ad>0
58、使用第it次智能驾驶测试中计算的静态场景参数rit和标量β∈[0,1]来量化提升静态场景复杂度:cs,crit(it+1)=(1+β)·cs(it)。
59、进一步地,所述步骤s42中进行动态场景自适应优化的具体过程为:
60、首先收集自然驾驶数据dn;
61、然后,识别和分析自然驾驶数据中不同交通参与者的行为,并获得交通参与者的运动状态s和动作u,为了生成满足要求的动态交通场景,计算相应状态下不同交通参与者的状态频率p(s)和动作频率p(u|s),对动态场景参数(s(t),u(t),p(s),p(u|s))进行初始化,并与静态交通场景sstatic组合以生成初始场景;
62、之后,根据生成的逐个测试场景对自动驾驶车辆进行测试,为了高效、合理地生成关键边界测试场景,需要通过从背景交通参与者中识别对被测自动驾驶车辆有较大影响的主要其他交通参与者,主要其他交通参与者的行为使用动态场景生成和自适应优化算法来动态调整,并且使用基于自然驾驶环境数据的模型来控制其他背景交通参与者的行为,使得生成的关键边界测试场景尽可能符合自然驾驶数据分布;
63、为了找到对测试的自动驾驶车辆对抗程度最大的主要其他交通参与者,利用自动驾驶车辆影响区域的概念来遍历和选择影响区域范围内的交通参与者,先分析测试环境中的自然交通流数据,并计算不同交通参与者的状态频率p(s)和不同状态下的动作频率p(u|s),在时间步t=0,…,t,状态和动作分别表示为:
64、s(t)=[s0(t),s1(t),…,sm+n+l(t)]
65、u(t)=[u0(t),u1(t),…,um+n+l(t)]
66、其中,s0(t)和u0(t)分别表示在时间t时被测试的自动驾驶车辆的状态和动作,si(t)(i=1,2,…,m+n+l)表示第i个背景交通参与者在时间t的状态,m,n和l分别表示影响区域范围内的背景车辆、背景行人和背景自行车的数量,ui(t)表示第i个背景交通参与者在时间t的动作。
67、再使用动态场景交互对复杂度ci,0来衡量周围交通参与者对被测的自动驾驶车辆的威胁级别,状态动作对(si,ui)下的交互对复杂度ci,0(si,ui)为:
68、
69、其中p(u0|s0)表示车辆在状态s0下的动作u0的概率;
70、基于获得的背景交通参与者的动作频率p(ui|si)和交互对复杂度ci,0(si,ui),综合计算相应的背景交通参与者的临界值q(ui|si):
71、q(ui|si)=p(ui|si)×ci,0(si,ui)
72、然后,将每个背景交通参与者的临界值计算为对应背景交通参与者所有动作的动作临界值之和:
73、
74、根据每个背景交通参与者的计算临界值,选择临界值最大的背景车辆、行人和自行车作为主要其他交通参与者,则主要其他车辆、行人和自行车识别如下:
75、
76、
77、
78、其中,qv、qp和qb分别表示主要的其他车辆、行人和自行车的编号,m、n和l分别表示影响区域内的背景车辆、行人和自行车的集合,qv、qp和qb分别表示用于识别主要其他车辆、行人和自行车的预定临界阈值,所述主要其他交通参与者具体为对抗车辆、对抗行人、对抗自行车或它们的任何组合,以最大限度地提高生成关键边界测试场景的效率;
79、在找到主要其他交通参与者之后,通过优化关键边界测试场景的行为,以逐渐增加动态场景的复杂性,主要其他交通参与者的行为对动态场景的复杂度有着至关重要的影响,场景复杂度的变化能够加快自动驾驶车辆性能边界的评估并找到关键边界测试场景,在场景参数的自适应调整过程中,进行场景复杂度的优化,如果自动驾驶车辆通过当前测试,则对动态交通场景复杂度阈值进一步提升,其计算如下:
80、ccrit=(1+β)cd(it)
81、其中,β∈(0,1]是场景复杂度提升系数;
82、在确定场景的复杂度阈值之后,对主要其他交通参与者的动作参数uq进行优化,以生成满足复杂度要求且与自然驾驶数据分布的偏差最小的关键边界测试场景,将从自然驾驶交通流中获得的主要其他交通参与者的行为轨迹表示为tnat(t,uq,nat),并将主要其他交通参与者的优化的行为轨迹表示成tcrit(t,uq),对应的目标函数和约束如下所示:
83、
84、s.t.d(it+1)≥ccrit,
85、
86、其中t0表示主要其他交通参与者的行为优化的开始时间,tf表示主要其他交通参与者对被测自动驾驶车辆的行为产生影响的持续时间,ttc(t)表示主要其他交通参与者与最近的障碍物或交通参与者之间在时间t的最小碰撞时间,ttcmin表示最小安全碰撞时间,通过上述约束确保没有周围其他交通参与者主动与被测的自动驾驶车辆发生碰撞。
87、与现有技术相比,本发明提出一种用于自动驾驶加速测试的关键边缘测试场景在线生成方法,通过构建自动驾驶测试场景复杂度模型来量化不同测试场景的复杂度,并综合考虑自动驾驶车辆、有人驾驶车辆、自行车和行人的复杂交互行为,综合考虑其对测试的自动驾驶车辆的影响,以对测试场景进行系统化的描述、生成、选取、优化和使用,由此将虚拟场景与真实交通流数据相结合,有效提高关键边界测试场景的灵活复杂性和多样性。
88、本发明建立了驾驶场景复杂度模型,该场景复杂度模型主要包括两部分:静态场景复杂度模型和动态场景复杂度模型。在静态场景复杂度模型中,场景复杂度分别从三个维度进行量化,即可行驶区域的面积、天气能见度和道路摩擦系数。在动态场景复杂度模型中,复杂度基于三个关键变量进行量化,包括被测自动驾驶车辆与周围其他交通参与者之间的遭遇角、相对距离和相对速度。然后基于势场理论等方法对整个测试场景进行场景复杂度刻画和危险度评价。由此能够更好地量化测试场景的复杂度和危险度,并找到关键测试场景来加速测试。
89、本发明综合考虑了由自动驾驶车辆、有人驾驶车辆、自行车和行人组成的混合交通流的复杂交互作用,首先设置了自动驾驶车辆周围潜在复杂度交通参与者的有效范围,然后计算动态交互对的复杂度,交互对由被测的自动驾驶车辆和周围的交通参与者组成,最后,综合考虑所有交互对的复杂度,以计算动态交通场景的复杂度。由此能够更全面地评估自动驾驶车辆周围动态交通参与者的复杂度。
90、本发明基于生成的自然驾驶仿真测试场景和场景复杂度模型,对自动驾驶系统进行全面的智能驾驶测试,并对测试结果进行分析,以确定是否需过关键边缘测试场景自适应生成算法进行测试场景优化,其中,关键边缘测试场景自适应生成算法从静态场景和动态场景两个角度同时进行场景的自适应优化。静态场景的自适应优化从可行驶区域、天气能见度和道路摩擦系数三个方面进行。动态交通场景的自适应优化是通过选择主要其他对抗交通参与者,对其进行自然和对抗的行为优化来实现的。在进行静态场景和动态交通场景自适应优化的过程中还利用场景复杂度模型对优化后的场景复杂度进行量化,基于场景复杂度提升系数来自适应提升测试场景的复杂度和危险度,最终能够生成具有不同复杂度级别的、用于不同维度性能测试的、覆盖各种场景的关键测试场景库。
- 还没有人留言评论。精彩留言会获得点赞!