触控板及电子设备的制作方法
1.本技术涉及触控技术领域,尤其涉及一种触控板及电子设备。
背景技术:
2.触控板(touch pad,tp)是一种应用于笔记本电脑等电子设备上的输入设备之一,其通过触摸传感器感知用户手指的位置和移动,并在显示界面上控制指针移动;通过压力传感装置和振动反馈装置来代替物理按键,实现功能确认和调出菜单等操作。
3.在相关技术中,振动反馈装置通常采用马达实现,具体的,马达固定在触控板的触摸控制板的下方,在压力传感装置检测的压力值达到设定阈值时,触摸控制板驱动马达内部振子振动,带动触控板振动,向用户提供振动反馈。
4.由于马达内部具有振子,结构复杂,厚度较大,导致触控板整体厚度较大,占用较大的安装空间,不适用于轻薄电子设备。
技术实现要素:
5.本技术提供一种触控板及电子设备,用以解决现有触控板整体厚度较大,占用较大安装空间的技术问题。
6.本技术第一方面提供一种触控板,包括:
7.柔性触摸板,设置有触摸感测电极,用于输出触摸感应信号;
8.补强板,具有相对的第三表面和第四表面,所述补强板的第三表面与所述柔性触摸板连接,用于补强所述柔性触摸板;所述补强板的第四表面设置有凹槽;
9.振动反馈装置,安装于所述凹槽内,用于产生振动反馈,所述振动反馈装置响应于所述触控板被按压时的压力;
10.控制板,固定于所述补强板的第四表面上;所述控制板上设置有触摸控制器,所述触摸控制器与所述柔性触摸板和所述振动反馈装置电性连接,用于根据所述触摸感应信号确定所述触控板的触摸位置,并根据所述触控板受到的按压力,驱动所述振动反馈装置发出振动反馈。
11.本技术实施例的触控板,采用补强板作为主体结构,在补强板的第三表面上设置柔性触摸板以实现触摸功能,相对于现有的印制电路板,厚度更薄,利于降低触控板的整体厚度;补强板起到补强柔性触摸板的作用,利于提高触控板的刚性;在补强板的第四表面设置凹槽,以安装振动反馈装置,从而使得振动反馈装置的部分厚度容纳于凹槽内,进而降低振动反馈装置在触控板中的厚度占比,进一步降低触控板的整体厚度;并且在补强板的第四表面还设置控制板,分别与柔性触摸板以及振动反馈装置电性连接,用于根据柔性触摸板的触摸感应信号确定手指在触控板的触摸位置;并用于根据手指按压触控板的压力大小,驱动振动反馈装置发出振动反馈;而且,控制板设置于补强板的第四表面,并没有凸出于振动反馈装置,因此,并不会影响触控板的整体厚度。由此,本技术的触控板的厚度减小到2.3~2.8mm,适用于轻薄的电子设备。本技术的触控板成本低、结构简单,刚性增强。
12.可选的,所述触摸感测电极和所述控制板的触摸控制器之间通过柔性连接件电性连接。
13.如此,柔性连接件能够弯折,从而可以跨越补强板,实现控制板和触摸感测电极的电性连接。
14.可选的,所述柔性触摸板包括触摸主体部以及弯折连接部,所述触摸感测电极设置于所述触摸主体部上,且所述触摸主体部与所述补强板的第三表面粘接;所述弯折连接部相对于所述触摸主体部弯折形成所述柔性连接件,所述弯折连接部电性连接所述触摸感测电极与所述控制板的触摸控制器。
15.如此,弯折连接部相对于触摸主体部弯折形成柔性连接件,此时,柔性连接件与触摸主体部为一体件,加工简单,利于提高生产效率。
16.可选的,所述补强板的边缘向其中心凹陷,以形成避让所述弯折连接部的避让缺口。
17.如此,如此设置可以使得弯折连接部位于避让缺口内,利于提高触控板结构的紧凑性,避让缺口还可以限制弯折连接部,避免弯折连接部相对补强板移动,而影响与控制板电性连接的稳定性。可选的,所述弯折连接部设置有多个,所述避让缺口与所述弯折连接部对应设置,每个所述弯折连接部均经由一个所述避让缺口与所述控制板电性连接。
18.可选的,所述避让缺口的深度范围为0.1~0.8mm。如此,可以避免避让缺口的深度大而影响补强板的结构强度,可以避免避让缺口的深度过小而不能避让弯折连接部。
19.可选的,所述补强板的厚度范围为0.3~1.0mm。如此,避免补强板的厚度过小影响触控板的整体结构强度,避免设置过厚的补强板导致触控板整体厚度增大,占用电子设备中电池的空间。
20.可选的,所述凹槽具有与所述补强板的第三表面相对设置的底壁,所述底壁与所述补强板的第三表面的距离范围为0.05~0.2mm。如此,既可以避免设置过浅的凹槽导致容纳的振动反馈装置的厚度空间过小,还可以避免设置过深的凹槽而影响补强板的结构强度。
21.可选的,所述控制板为印制电路板。
22.可选的,所述控制板为柔性电路板,且所述柔性电路板的厚度范围为0.08~0.2mm。
23.可选的,所述控制板包括层叠设置的柔性电路板以及补强片,所述补强片设置于所述柔性电路板和所述补强板的第四表面之间,所述补强片用于补强所述柔性电路板;所述柔性电路板与所述柔性触摸板和所述振动反馈装置电性连接;以及所述柔性电路板的厚度范围为0.08~0.13mm,如此设置可以避免柔性电路板的厚度过小而影响其结构稳定性;所述补强片的厚度范围为0.1~0.3mm,如此设置既可以保证对柔性电路板的补强作用,还可以避免设置过厚的补强片导致触控板的整体厚度过大。
24.可选的,所述触控板还包括加强件,所述加强件与所述补强板的第四表面连接,所述加强件与所述控制板和所述振动反馈装置在所述补强板的第四表面内互不干涉。通过设置加强件提高触控板的结构强度和刚度,减少触控板受力后的形变。
25.可选的,所述加强件包括两条沿所述补强板的长边方向延伸的加强条,两条所述加强条分别设置于所述补强板的相对的两个长边的边缘处,所述控制板和所述振动反馈装
置位于两个所述加强条之间。
26.可选的,所述触控板还包括设置在所述补强板的第四表面的弹性支架,所述弹性支架上设置有螺纹固定孔,所述螺纹固定孔用于与电子设备的支撑壳固定连接;所述弹性支架具有悬臂,所述悬臂上设置有压力传感器,用于在所述触控板受按压时发生形变,并输出相应的压力感应信号;所述控制板的触摸控制器与所述压力传感器电性连接,用于从所述压力传感器接收压力感应信号,并确定所述触控板受到的按压力大小。
27.可选的,所述悬臂上设置有弹性垫,所述弹性垫与所述补强板的第四表面粘接,用于弹性支撑所述触控板;所述弹性垫为硅胶垫,所述硅胶垫的厚度范围为0.3~1.0mm。
28.可选的,所述螺纹固定孔设置于所述弹性垫背离所述振动反馈装置的一侧。如此,固定螺钉可以从下向上依次与螺纹固定孔以及电子设备上部的支撑壳螺纹连接,实现触控板的安装;或者,固定螺钉可以从上向下依次与螺纹固定孔以及电子设备下部的支撑壳螺纹连接,实现触控板的安装,安装方式更加灵活。
29.可选的,所述螺纹固定孔设置于所述弹性垫靠近所述振动反馈装置的一侧。
30.可选的,所述触控板还包括盖板,用于为手指的触摸或按压提供输入界面;所述盖板与所述柔性触摸板的第一表面粘贴。
31.本技术第二方面提供一种电子设备,包括支撑壳,
32.第一方面所述的触控板,所述触控板安装于所述支撑壳上。
33.本技术的第二方面提供的电子设备,由于其包括第一方面所述的触控板,因此,本技术的第二方面提供的电子设备也具有与第一方面所述的触控板相同的优点。
附图说明
34.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
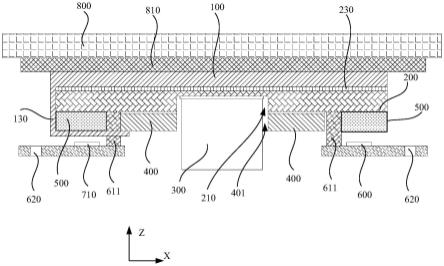
35.图1为本技术实施例一提供的触控板的层叠结构图;
36.图2为本技术实施例提供的触控板的结构示意图;
37.图3为本技术实施例提供的触控板的爆炸图;
38.图4为本技术一实施例提供的触控板的补强板的仰视图;
39.图5为图4中的a-a剖视图;
40.图6为本技术实施例提供的触控板的柔性触摸板的仰视图;
41.图7为本技术另一实施例提供的触控板的补强板的仰视图;
42.图8为本技术实施例提供的弹性支架及压力传感器的结构示意图;
43.图9为图8中p区域的放大示意图;
44.图10为本技术实施例二提供的触控板的层叠结构图;
45.图11为本技术实施例提供的电子设备的结构示意图。
46.附图标记说明:
47.100:柔性触摸板;101:第一表面;102:第二表面;110:触摸主体部;120:弯折连接部;121:第一连接端子;130:柔性连接件;
48.200:补强板;201:第三表面;202:第四表面;210:凹槽;211:底壁;220:避让缺口;230:第二粘贴胶;
49.300:振动反馈装置;
50.400:控制板;401:过孔;410:柔性电路板;420:补强片;431:第一连接器;432:第二连接器;
51.500:加强件;510:第四粘贴胶;
52.600:弹性支架;610:悬臂;611:弹性垫;620:螺纹固定孔;630:矩形框;631:纵边梁;632:横边梁;
53.710:压力传感器;711:第三粘贴胶;720:排线;730:排线引脚;
54.800:盖板;810:第一粘贴胶;
55.900:电子设备;910:支撑壳。
具体实施方式
56.触控板(touch pad,tp)是一种应用于笔记本电脑等电子设备上的输入设备之一,其通过触摸传感器感知用户手指的位置和移动,并在显示界面上控制指针移动;通过压力传感装置和振动反馈装置来代替物理按键,实现功能确认和调出菜单等操作。振动反馈装置通常采用马达实现,具体的,马达固定在触控板的触摸控制板的下方,在压力传感装置检测的压力值达到设定阈值时,触摸控制板驱动马达内部振子振动,带动触控板振动,向用户提供振动反馈。由于马达内部具有振子,结构复杂,厚度较大,导致触控板整体厚度较大,占用较大的安装空间,不适用于轻薄电子设备。
57.有鉴于此,本技术提供一种触控板,设置柔性触摸板与盖板粘接,实现触摸功能,利于降低触控板厚度;在柔性触摸板背离盖板的一面设置补强板,起到补强柔性触摸板的作用;补强板背离柔性触摸板的一面设置安装振动反馈装置的凹槽,以容纳部分振动反馈装置,有利于进一步降低触控板的厚度,并在补强板上设置控制板,分别与柔性触摸板和振动反馈装置电性连接,实现触控板的触摸功能和振动反馈功能。
58.进一步的,本技术触控板还在补强板背离柔性触摸板的一面设置加强件,提高触控板的结构强度。
59.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
60.实施例一
61.图1为本技术实施例一提供的触控板的层叠结构图,图2为本技术实施例提供的触控板的结构示意图;图3为本技术实施例提供的触控板的爆炸图。
62.结合图1至图3,本技术实施例提供一种触控板,其包括:盖板800、柔性触摸板100、补强板200、振动反馈装置300以及控制板400。
63.本技术实施例中的,盖板800起到外观件和保护的作用,盖板800为大致平面的刚性材料片,具体地可以为玻璃、pc片材、陶瓷片材、聚酯薄膜(mylar)等不导电刚性物体。盖板800顶表面可以是光滑的,也可以是具有粗糙纹理的,使触控板外观符合产品美学设计。
盖板800可为大致矩形的形状,在一些实施方式中,盖板800的矩形外表面边缘还可以倒圆角。在另一可能的实施例中,盖板800的形状也可以是圆形、三角形等类似的基本形状,用于接收用户的触摸输入。
64.盖板800的顶表面配置为在触控板被操作时接触一个或多个用户对象,例如,手指、触笔。因此,用户可以通过使用上述一个或多个用户对象点击、滑动或按压或以其他方式向盖板800的顶表面施加力来提供输入。此处所说的盖板800的顶表面指的是盖板800背离柔性触摸板100的表面。
65.可选的,盖板800的厚度范围为0.15~0.35mm。可以理解的是,在本技术实施例中,厚度指的是沿z轴方向的尺寸,z轴垂直于柔性触摸板100的表面。
66.柔性触摸板100设置在盖板800的下方,柔性触摸板100上设置有触摸感测电极,用于在手指触摸或按压触控板时感测手指的触摸位置并输出相应的触摸感应信号。柔性触摸板100具有相对的第一表面101和第二表面102,第一表面101用于与盖板800粘贴。在本技术实施例中,结合图1和图3,柔性触摸板100的第一表面101通过第一粘贴胶810与盖板800粘贴。其中,第一粘贴胶810可以是液态胶或固态胶,例如,双面胶膜、热固胶膜、热熔胶膜、热固胶水、uv固化胶水等。
67.柔性触摸板100具有柔性、可弯折,方便弯折以与隔层设置的控制板400电性连接。柔性触摸板100为柔性的基板上设置触摸感测电极形成。柔性触摸板100可以包括基板以及设置于基板上的触摸感测电极,基板的材质包括但不限于聚对苯二甲酸类塑料(polyethylene terephthalate,简称pet或者petp)、聚乙烯塑料(polyethylene,简称pe)、聚酰胺(polyamide,简称pa)、聚碳酸酯(polycarbonate,简称pc)。触摸感测电极包括两层电极层(tx,rx),这两层电极分别设置在基板的第一表面和第二表面,或者这两层电极同时设置在基板的第一表面且该两层电极之间设置有隔离层,例如该隔离层为绝缘的涂层;基板的第一表面为朝向盖板800的一面,基板的第二表面为背离盖板800的一面。其中,这两层电极分别为驱动电极和接收电极,驱动电极和接收电极为行/列交错的排布方式,控制板400上的触摸控制器向驱动电极输出驱动信号,并接收感应电极的触摸感应信号,在手指触摸盖板800时,控制板400接收到的触摸感应信号发生变化,经过控制板400上的触摸控制器运算处理,而获取触摸位置的坐标位置。
68.结合图1和图3,本技术实施例的补强板200用于补强柔性触摸板100,提高触控板的整体结构强度。可选的,补强板200的厚度d1范围为0.3~1.0mm,避免补强板200的厚度过小影响触控板的整体结构强度,避免设置过厚的补强板200导致触控板整体厚度增大,占用电子设备中电池的空间。补强板200可以是不锈钢板、钛金板、铝合金板等。
69.本技术实施例采用补强板200作为主载体,补强板200具有相对的第三表面201和第四表面202,在补强板200的第三表面201上设置柔性触摸板100,利用补强板200保证触控板整体的结构强度,且触控板具有厚度小的优点。
70.补强板200的第三表面201与柔性触摸板100的第二表面102粘贴,其中,第二表面为柔性触摸板朝向补强板的一面。结合图3,补强板200的第三表面201通过第二粘贴胶230与柔性触摸板100的第二表面102相贴合,第二粘贴胶230可以是液态胶或固态胶,例如,双面胶膜、热固胶膜、热熔胶膜、热固胶水、uv固化胶水等。
71.图4为本技术一实施例提供的触控板的补强板的仰视图;图5为图4中的a-a剖视
图。结合图1和图5,补强板200的第四表面202设置有凹槽210,例如,在补强板200的第四表面202蚀刻或者机加工形成凹槽210。凹槽210可以容纳振动反馈装置300厚度方向的一部分,从而减小振动反馈装置300在触控板整体厚度中的占比,进而有利于降低触控板的整体厚度。
72.可选的,结合图5,凹槽210具有与补强板200的第三表面201相对设置的底壁211,底壁211与第三表面201的距离d2范围为0.05~0.2mm,既可以避免设置过浅的凹槽210导致容纳的振动反馈装置300的厚度空间过小,还可以避免设置过深的凹槽210而影响补强板200的结构强度。
73.结合图4,在其中一些实施例中,凹槽210位于补强板200的中心区域,如此,振动反馈装置300安装于补强板200的中心区域。可以理解为,在补强板200为矩形板时,凹槽210位于补强板200的长度方向(对应图中x轴方向)的中心位置和宽度方向(对应图中y轴方向)的中心位置。如此设置,利于提高振动反馈装置300在触控板整个平面内提供较为均衡的振动反馈,提高用户体验度。
74.当然,这并不是对凹槽210设置位置和振动反馈装置300安装位置的限定,凹槽210可以偏离补强板200的中心区域,例如,凹槽210可以设置于补强板200的长度方向的偏左位置,或者,凹槽210可以设置于补强板200宽度方向的偏下位置等。
75.凹槽210在补强板200的第四表面202上的投影形状可以是“凸”字型,但这并不是限制性的,例如,凹槽210可以是圆形、椭圆形、多边形或者不规则形状等,本技术实施例对凹槽210的形状不做限定,只要能够适配振动反馈装置300的形状,使得振动反馈装置300能够安装于凹槽210内即可。
76.本技术实施例的振动反馈装置300安装于凹槽210内,响应于触控板被按压时的压力,在触控板被按压时的压力大于预设值时,振动反馈装置300在控制板400的作用下进行振动反馈。其中,振动反馈装置300可以为马达,例如,线性马达、压电马达、z轴马达等。在某些可能的实现方式中,振动反馈装置300粘接于凹槽210内,固定方式稳定且组装简单方便。
77.本技术实施例通过在补强板200上设置凹槽210,将振动反馈装置300安装于凹槽210内,使得位于凹槽210内的部分振动反馈装置300的厚度与补强板200的厚度重合,从而复用凹槽210的厚度,进而降低触控板的整体厚度,利于将触控板应用于轻薄电子设备。
78.本技术实施例的控制板400固定于补强板200的第四表面202上,示例性的,控制板400粘接于补强板200的第四表面202上,连接方式简单可靠。控制板400分别与柔性触摸板100和振动反馈装置300电性连接,用于根据触摸感应信号确定手指在触控板的触摸位置;并用于根据触控板受到的按压力,驱动振动反馈装置300发出振动反馈。
79.在一些可能的实施例中,控制板400为印制电路板(printed circuit board,pcb),触摸控制器设置于印制电路板背离补强板200的表面。印制电路板本身具备一定的硬度,结构强度比较好。通过在pcb板上经过表面贴装技术(surface mounted technology,smt)贴片上件,或经过双列直插封装(dual in-line package,dip)配置电子元件实现印制电路板装配(printed circuit board assembly,pcba),pcba用于实现触控板的触摸感应功能。其中,电子元件包括但不限于触摸控制器、电连接器等。其中,触摸控制器具体用于从触摸感测电极接收触摸感应信号,确定手指在触控板的触摸位置,以及接收压力传感器710的压力感应信号,确定手指的按压力大小并根据手指的按压力大小,驱动振动反馈装置300
发出振动反馈。
80.在另一些可能的实施例中,控制板400为柔性电路板(flexible printed circuit,fpc),触摸控制器设置于柔性电路板背离补强板200的表面。厚度相对比较薄,有利于进一步降低触控板的整体厚度。示例性的,柔性电路板的厚度范围为0.08~0.2mm,避免设置厚度过小的柔性电路板而影响其结构强度。
81.在又一些可能的实施例中,结合图3,控制板400包括层叠设置的柔性电路板410以及补强片420,柔性电路板410分别与柔性触摸板100和振动反馈装置300电性连接。补强片420用于补强柔性电路板410的强度,可以是不锈钢片、铝合金片等。补强片420分别与柔性电路板410和补强板200的第四表面202粘接,补强片420用于补强柔性电路板410。柔性电路板410背离补强片420的表面设置有触摸控制器、电连接器等电子元器件,实现与柔性触摸板100、振动反馈装置300等的电性连接。本技术实施例的控制板400在利用柔性电路板410降低触控板整体厚度的同时,设置补强片420补强柔性电路板410,提高柔性电路板410的结构稳定性,避免柔性电路板410受力损坏而影响触控板的功能。
82.在此基础上,由于利用补强片420对柔性电路板410进行补强,因此柔性电路板410的厚度可以相对小一些,示例性的,柔性电路板410的厚度范围为0.08~0.13mm,如此设置可以避免柔性电路板410的厚度过小而影响其结构稳定性;补强片420的厚度范围为0.1~0.3mm,如此设置既可以保证对柔性电路板410的补强作用,还可以避免设置过厚的补强片420导致触控板的整体厚度过大。
83.继续参照图1,在本技术实施例中,控制板400上设置有与凹槽210相对的过孔401,以使振动反馈装置300穿过过孔401而安装于凹槽210中。如此设置,使得控制板400的厚度与振动反馈装置300的部分厚度重合,而进一步降低触控板的整体厚度。
84.当然,这并不是限制性的,示例性的,控制板400和振动反馈装置300在补强板200的长边方向(对应图中x轴方向)相互错开,例如,振动反馈装置300设置于补强板200长边方向的偏右位置,控制板400设置于补强板200长边方向的偏左位置。
85.本技术实施例的控制板400接收柔性触摸板100的触摸感测电极发送的触摸感应信号,经过运算处理确定手指在触控板的触摸位置,再次结合图1,由于控制板400和柔性触摸板100分别位于补强板200相对的两个表面,因此需要设置电性连接结构跨越补强板200,实现控制板400的触摸控制器和柔性触摸板100的触摸感测电极的电性连接。示例性的,本实施例的触控板设置柔性连接件130作为电性连接结构,柔性连接件130能够弯折,从而可以跨越补强板200,实现控制板400的触摸控制器和柔性触摸板100上触摸感测电极的电性连接。
86.可以理解的是,在图1中示出的柔性连接件130为l型,这仅是对柔性连接件130进行示意,并不是对柔性连接件130形状的限定。在实际的结构中,由于柔性连接件130通常具有弯折半径,因此柔性连接件130的弯折位置为弧形。
87.由于本技术实施例的柔性触摸板100为fpc,具有柔性可弯折的特性,因此,柔性触摸板100的部分结构弯折形成柔性连接件130,以跨越补强板200与控制板400的触摸控制器电性连接,连接方式简单、加工也简单,生产效率高。
88.图6为本技术实施例提供的触控板的柔性触摸板的仰视图,结合图6,本技术实施例的柔性触摸板100包括触摸主体部110以及弯折连接部120,触摸主体部110具有相对的第
一表面101和第二表面102,触摸主体部110的第二表面102与补强板200的第三表面201粘接;触摸主体部110的第一表面101与盖板800粘接;触摸主体部110包括基板以及设置于基板上的触摸感测电极,触摸主体部110的触摸感测电极用于在手指触摸或按压触控板时感测手指的触摸位置并输出相应的触摸感应信号。弯折连接部120相对于触摸主体部110弯折形成柔性连接件130,弯折连接部120包括基板以及设置于基板上的金属走线,弯折连接部120的基板与触摸主体部110的基板材质相同;金属走线用于实现触摸感测电极与控制板400的触摸控制器电性连接,从而驱动信号传输至触摸感测电极,并将触摸感应信号传输至控制板400。
89.示例性的,结合图6以及图2,控制板400上设置有第一连接器431,弯折连接部120的端部设置有第一连接端子121,第一连接端子121与第一连接器431电性连接,从而实现触摸主体部110与控制板400的触摸控制器电性连接。
90.弯折连接部120相对于触摸主体部110弯折形成柔性连接件130,此时,柔性连接件130与触摸主体部110为一体件,柔性连接件130由柔性触摸板100的一部分结构形成;当然,柔性连接件130还可以独立于柔性触摸板100存在,例如,柔性连接件130为柔性可弯折的柔性排线。在柔性连接件130的两侧分别设置有电性连接用的端子,柔性连接件130两侧的端子分别与触摸感测电极以及控制板400的触摸控制器电性连接;当然,此时的柔性触摸板100上设置有与电性连接座,以与柔性连接件130端部的端子电性连接。
91.图7为本技术另一实施例提供的触控板的补强板的仰视图。
92.在一些实施例中,结合图7,补强板200的边缘向其中心凹陷,以形成避让弯折连接部120的避让缺口220,此时,弯折连接部120通过避让缺口220绕过补强板200与控制板400的触摸控制器电性连接。如此设置可以使得弯折连接部120位于避让缺口220内,利于提高触控板结构的紧凑性,避让缺口220还可以限制弯折连接部120,避免弯折连接部120相对补强板200移动,而影响与的触摸控制器的稳定性。
93.弯折连接部120可以设置一个,此时避让缺口220设置有一个,所有的触摸感测电极的触摸感应信号均通过该弯折连接部120传输至控制板400。
94.弯折连接部120可以设置有多个,例如,两个、三个等,示例性的,触摸主体部110划分为多个区域,不同区域的触摸感测电极分别通过一个弯折连接部120与控制板400的触摸控制器电性连接;避让缺口220与弯折连接部120对应设置,可以理解为,避让缺口220设置有多个,且避让缺口220的数量与弯折连接部120的数量相同,每个弯折连接部120均经由一个避让缺口220与控制板400的触摸控制器电性连接。如此可以设置对触摸感测电极进行区域划分,不同区域触摸感测电极的触摸感应信号通过不同的弯折连接部120传输至控制板400,可以提高柔性触摸板100与控制板400电性连接的灵活性。
95.多个避让缺口220在补强板200边缘的位置可以有多种情况。在补强板200为矩形板时,在一些示例中,多个避让缺口220均设置于补强板200的同一侧边缘,例如,多个避让缺口220均设置于补强板200的同一长侧边边缘,多个避让缺口220沿该长侧边边缘间隔布置。在另一些示例中,至少一个避让缺口220设置于补强板200的第一侧边边缘,其他避让缺口220设置于补强板200的第二侧边边缘,如图7所示,在补强板200的宽侧边边缘设置一个避让缺口220,在补强板200的长侧边边缘设置有两个避让缺口220。本技术实施例对避让缺口220的位置以及数量不做限定。
96.继续参照图7,避让缺口220的深度范围d3为0.1~0.8mm,避免避让缺口220的深度d3过大而影响补强板200的结构强度,避免避让缺口220的深度d3过小而不能避让弯折连接部120。避让缺口220的宽度w根据具体弯折连接部120的宽度进行确定,在此不做限定。
97.在另一些实施例中,补强板200上并没有设置避让缺口220,如图4所示,弯折连接部120直接弯折跨越补强板200,而与控制板400的触摸控制器电性连接,如此设置,在组装过程中可以根据实际情况灵活设置弯折连接部120的弯折位置。
98.继续参照图1至图3,本技术实施例的触控板还包括加强件500,加强件500与补强板200的第四表面202连接,例如,加强件500通过第四粘贴胶510与补强板200的第四表面202粘接。第四粘贴胶510可以是双面胶膜、热固胶膜、热熔胶膜、热固胶水、uv固化胶水等。本技术实施例的触控板通过设置加强件500提高触控板的结构强度和刚度,减少触控板受力后的形变。加强件500可以是不锈钢板、钛金板等。
99.加强件500可以是条状结构,如图3所示。本技术实施例对加强件500的形状不做限定,只要加强件500与控制板400、振动反馈装置300以及后续的弹性支架600在补强板200的第四表面202内互不干涉即可。“互不干涉”可以理解为,加强件500与控制板400、振动反馈装置300以及弹性支架600均布置在补强板200的第四表面202内,但是在补强板200的厚度方向(对应图中z轴方向)上,相互避开、不重叠。
100.示例性的,加强件500为矩形板结构,其上设置有避让控制板400和振动反馈装置300的开口,本技术实施例对加强件500的形状不做限定,在避让控制板400、振动反馈装置300以及后续的弹性支架600基础上,加强件500可以是任意形状。再例如,结合图3,加强件500包括两条为沿补强板200的长边方向(对应图中x轴方向)延伸的加强条,两条加强条分别设置于补强板200的相对的两个长边的边缘处,控制板400和振动反馈装置300位于两个加强条之间,如此设置加强件500在避让控制板400和振动反馈装置300的同时,对补强板200的边缘起到加强作用,提补强板200的结构强度。
101.在本技术实施例中,通过在补强板200的第四表面202设置加强件500,进一步提高触控板的结构强度;由于加强件500和控制板400均粘接于补强板200的第四表面202上,并不会增加触控板沿z轴方向的厚度尺寸,使得触控板仍然可以保持较小的厚度。
102.继续参照图1和图2,本技术实施例的触控板还包括设置在补强板200的第四表面202的弹性支架600,弹性支架600具有悬臂610,悬臂610上设置有压力传感器710,用于在触控板受手指按压时发生形变,并输出相应的压力感应信号。控制板400的触摸控制器与压力传感器710电性连接,用于从压力传感器710接收压力感应信号,并确定触控板受到的按压力大小。
103.其中,压力传感器710的类型可以有多种,例如,电阻应变片压力传感器、半导体应变片压力传感器。可选的,压力传感器710为压阻式压力传感器,结构简单、灵敏度高。压阻式压力传感器可以包括四个可变电阻,四个可变电阻互联构成惠斯通电桥检测电路,经该检测电路将电阻变化转换为相应的电信号(电压或电流)输出,从而完成将压力转换成为电信号的过程。
104.本技术实施例的悬臂610具有相对的固定端和自由端,其中,在弹性支架600固定于电子设备上时,悬臂610的固定端相对于触控板固定,悬臂610远离弹性支架600的一端悬置而形成悬臂610的自由端。悬臂610的自由端设置有压力传感器710。
105.图8为本技术实施例提供的弹性支架及压力传感器的结构示意图;图9为图8中p区域的放大示意图。结合图9,压力传感器710通过第三粘贴胶711粘接于悬臂610的自由端,其中,第三粘贴胶711可以是液态胶或固态胶,例如,双面胶膜、热固胶膜、热熔胶膜、热固胶水、uv固化胶水等。在触控板受力时悬臂610能够产生弹性变形,带动压力传感器710一起发生弹性形变,从而使得压力传感器710能够检测触控板受到的压力。
106.结合图8,弹性支架600具有四个悬臂610,四个悬臂610分别布置于矩形的补强板200的四个角区域,每个悬臂610上分别设置有压力传感器710。如此设置可以使得弹性支架600均匀的支撑补强板200,还可以方便计算压力值。
107.在此需要说明的是,压力传感器710通过排线720电性连接至控制板400的触摸控制器,其中,排线720设置为s型,如此设置可以灵活调整压力传感器710的粘贴位置,利于提高压力传感器710的变形以及粘贴位置的准确度。
108.示例性的,排线720通过排线引脚730与控制板400的触摸控制器电性连接。其中,排线引脚730上设置有第二连接端子,控制板400上设置有第二连接器432,第二连接器432与第二连接端子电性连接,以实现排线720与控制板400的电性连接。
109.其中,两个压力传感器710的两个排线720可以通过一个排线引脚730与控制板的触摸控制器电性连接,以简化电性连接结构。在图8示出的结构中,由于长条形的加强件500的设置,左侧的两个压力传感器710的两个排线720通过一个排线引脚730与控制板400的触摸控制器电性连接,右侧的两个压力传感器710的两个排线720通过一个排线引脚730与控制板400的触摸控制器电性连接。但这并不是限制性的,例如,在与加强件500互不干涉时,上方的两个压力传感器710和下方的两个压力传感器710分别通过一个排线引脚730与控制板400的触摸控制器电性连接。当然,每个压力传感器710的排线720可以分别连接一个排线引脚730。
110.结合图8和图9,本技术实施例的弹性支架600包括矩形框630以及悬臂610,悬臂610连接于矩形框630内。矩形框630包括两条纵边梁631和两条横边梁632,两条纵边梁631沿y轴方向延伸,两条横边梁632沿x轴方向延伸。两条纵边梁631、两条横边梁632以及四个悬臂610为一体成型的一体件。示例性的,其中两个悬臂610设置于其中一条纵边梁631的两端,另外两个悬臂610设置于另外一条纵边梁631的两端,四个悬臂610关于矩形框630的第一中心线对称,第一中心线沿y轴延伸,且矩形框630关于第一中心线对称。
111.可以理解的是,弹性支架600的形状不限于矩形,例如弹性支架600还可以是“工”字型、长条形等。弹性支架600可以设置一个,如图8所示;弹性支架600还可以设置多个,弹性支架600为沿y轴方向延伸的长条形,长条形弹性支架600的两端分别设置两个悬臂610,在补强板200沿x轴方向的两端分别设置一个长条形的弹性支架600。
112.结合图8和图9,在四个悬臂610的自由端设置有弹性垫611,弹性垫611与补强板200的第四表面202粘接,用于弹性支撑触控板。弹性垫611可以是具有弹性的支撑垫,例如,弹性垫611为硅胶垫,硅胶垫的厚度范围为0.3~1.0mm。
113.在触控板受到按压力时,压力通过悬臂610自由端的弹性垫611传递至悬臂610上,悬臂610产生弹性变形,使得粘贴在悬臂610上的压力传感器710产生变形而检测到悬臂610受到的压力,经由控制板400的运算处理确定压力值,在压力值达到一定阈值时,向电子设备的系统上报以实现鼠标左键和右键的功能,实现功能确认和调出菜单等操作。在压力撤
销后,悬臂610在弹性垫611的作用下恢复至无受力的初始状态。
114.此外,弹性支架600还可以具有六个悬臂610,其中四个悬臂610分别布置于矩形的补强板200的四个角区域,另外两个悬臂610分别布置于矩形补强板200的长侧边的中心。
115.在触控板安装于电子设备上时,弹性支架600固定于电子设备的支撑壳上,各悬臂610相对于电子设备悬置。
116.结合图8和图9,在一些实施例中,弹性支架600上设置有螺纹固定孔620,螺纹固定孔620用于与电子设备的支撑壳固定连接。具体的,弹性支架600上设置有固定部,固定部上开设有螺纹固定孔620。为了保证弹性支架600的弹性力,弹性支架600通常是片状,例如不锈钢片。固定部可以是设置于弹性支架600上的凸台;或者,在弹性支架600上设置有安装通孔,螺母铆接或者焊接等固定于安装通孔内,而形成固定部,如此设置可以提高螺纹固定孔620的螺纹长度,提高触控板安装的稳定性和可靠性。
117.螺纹固定孔620设置于弹性支架600的矩形框630上,本技术实施例对螺纹固定孔620的数量以及布置方式不做限定。示例性的,沿矩形框630的横边梁632间隔设置三个螺纹固定孔620,沿矩形框630的纵边梁631间隔设置三个螺纹固定孔620。可选的,在悬臂610相对的部分纵边梁631上设置有一个螺纹固定孔620,利于悬臂610固定端的固定以及悬臂610自由端的变形,利于提高触控板在电子设备安装的稳定性。
118.结合图1,螺纹固定孔620设置于弹性垫611靠近振动反馈装置300的一侧。此时,固定螺钉可以从下(对应图中z轴负方向)向上依次与螺纹固定孔620以及电子设备上部的支撑壳螺纹连接,从而实现触控板的安装。
119.本技术实施例的触控板组装的工艺流程包括:将振动反馈装置300粘接于补强板200的凹槽210内,并将柔性触摸板100粘接于补强板200的第三表面201,弯折柔性触摸板100形成弯折连接部120;然后,在柔性触摸板100的表面通过第一粘贴胶810粘贴盖板800;将控制板400粘接于补强板200的第四表面202;将压力传感器710粘接于弹性支架600,并将弹性支架600通过弹性垫611粘接于补强板200的第四表面202;最后组装弯折连接部120和压力传感器710分别与控制板400的触摸控制器电性连接,以及辅助膜材等。
120.本技术实施例的触控板的厚度为2.3~2.8mm,其厚度小于相关技术中3mm厚的触控板,减小安装时占用电子设备内的空间,可以适用于轻薄的电子设备,提高适用范围。其中,触控板的厚度为触控板沿z轴方向的最大尺寸。结合图1,振动反馈装置300的底面可以与弹性支架600平齐,触控板的厚度为盖板800的顶表面与弹性支架600的底面沿z轴方向的尺寸。
121.实施例二
122.图10为本技术实施例二提供的触控板的层叠结构图;结合图10,本技术实施例提供的触控板为实施例一中触控板的可替换方案,本实施例中螺纹固定孔620的位置与实施例一中不同,其他结构、功能及效果可以参照实施例一,在此不再赘述。
123.本实施例的螺纹固定孔620设置于弹性垫611背离振动反馈装置300的一侧,此时,固定螺钉可以从下(对应图中z轴负方向)向上依次与螺纹固定孔620以及电子设备上部的支撑壳螺纹连接,实现触控板的安装;或者,固定螺钉可以从上(对应图中z轴正方向)向下依次与螺纹固定孔620以及电子设备下部的支撑壳螺纹连接,实现触控板的安装,安装方式更加灵活。
124.继续参照图10,振动反馈装置300的底面可以凸出于弹性支架600,此时,触控板的厚度为盖板800的顶表面与振动反馈装置300底面沿z轴方向的尺寸。
125.实施例三
126.图11为本技术实施例提供的电子设备的结构示意图。
127.结合图11,本技术实施例一种电子设备900,其包括:支撑壳910以及实施例一的触控板,触控板的弹性支架安装于支撑壳910上。本实施例的触控板的结构、功能和效果与上述实施例一和实施例二相同,具体可以参照上述实施例一和实施例二,在此不再进行赘述。
128.本技术实施例的技术方案可以应用于各种电子设备,例如,智能手机、笔记本电脑、平板电脑、笔电键盘、皮套键盘、游戏设备等便携式或移动计算设备,以及电子数据库、汽车、银行自动柜员机(automated teller machine,atm)等其他电子设备。但本技术实施例对此并不限定。
129.本技术实施例的电子设备还包括主机,主机与控制板上的触摸控制器电性连接。一方面,触摸控制器根据主机的控制信号,向触摸传感器提供驱动信号以驱动触摸感测电极进行触摸检测;另一方面,触摸控制器用于在手指按压在触控板时接收触摸感测电极和压力传感器输出的触摸感应信号和压力值,并基于上述触摸感应信号和压力值确定手指位置信息和振动反馈信号。
130.最后应说明的是:以上各实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述各实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1