一种基于机器人管理系统的智能派车方法与流程
本发明涉及物流管理,具体为一种基于机器人管理系统的智能派车方法。
背景技术:
1、智能无人车(agv,automated guided vehicle)在区域内进行派送是较好的选择,同时也契合人工智能的趋势潮流,现有的机器人管理系统(rcs,robot control system)只是分派无人车沿固定路径进行派送工作,即设置好目的地后按照确定的一条或几条路线行驶。其工作过程一般是物流人员为智能无人车安排所需派送的货物,在设置目的地后启动车辆,使其完成配送任务。
2、针对目前rcs派送主要是按照固定路线行驶,在进行货架搬运作业并需要派车时,容易出现任务派发不及时,搬运任务找不到车辆,且缺少对任务优先级的划分,造成部分货物转运周期较长,使得物流货架负载较大,导致入库作业和出库作业难度增加的问题,本发明提出一种基于机器人管理系统的智能派车方法来解决此问题。
技术实现思路
1、本发明的目的在于提供一种基于机器人管理系统的智能派车方法,在接收上位仓储控制系统(wcs,warehouse control system)下发的货架搬运作业任务,能够智能化派发任务,有效提高agv小车工作效率,以解决上述背景技术提出的问题。
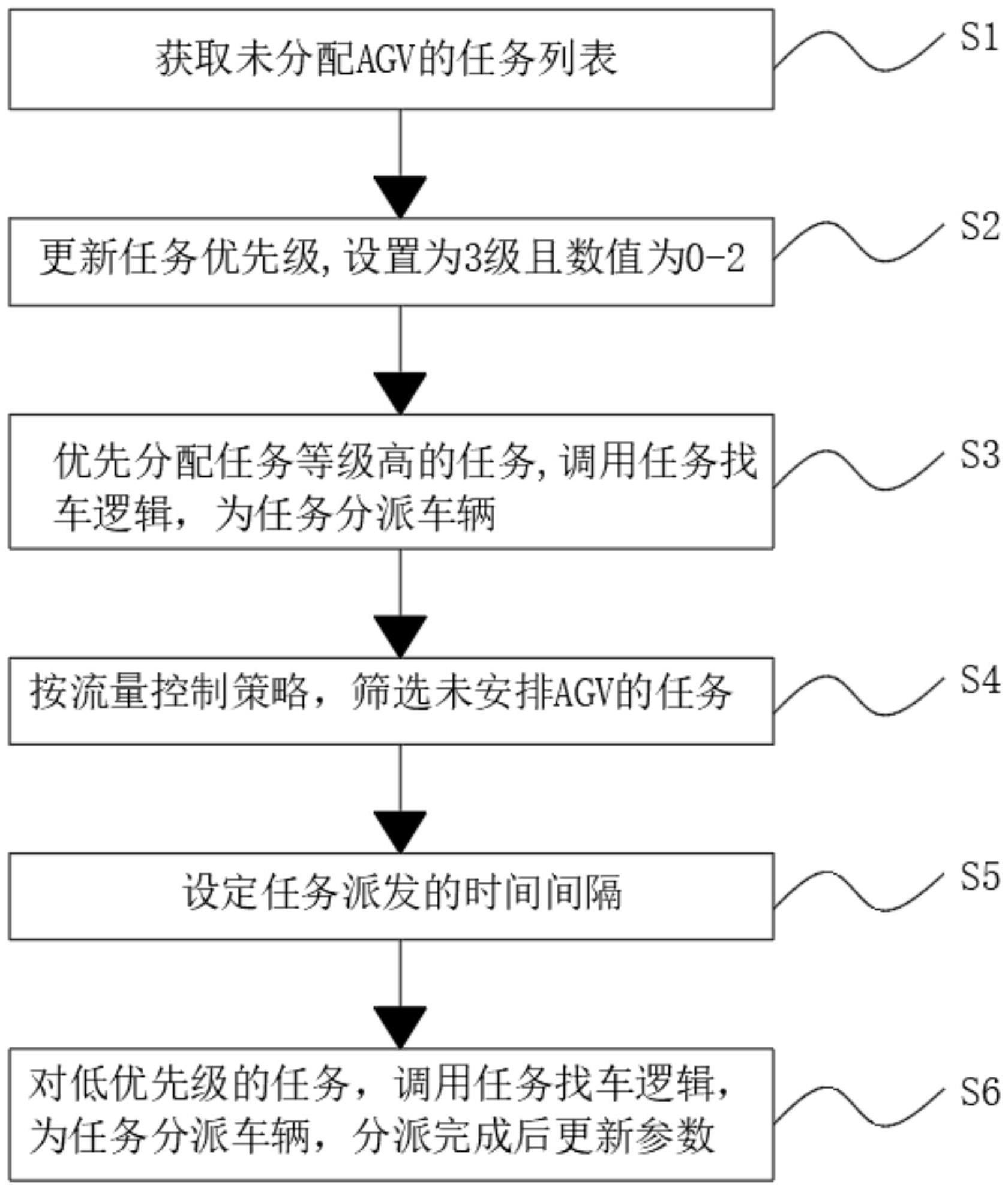
2、为实现上述目的,本发明提供一种基于机器人管理系统的智能派车方法,包括:
3、接收wcs下发的任务,按时间顺序根据终点分区添加到未分配agv的任务列表里;
4、获取未分配agv的任务列表;
5、按流量控制策略,筛选未安排agv的任务,当工作站当前已分配agv的任务数量达到上限,停止派车;
6、考虑出入库均衡作业,设定出入库任务派发的时间间隔;
7、更新任务优先级;
8、优先分配任务等级高的任务,并调用任务找车逻辑,为任务分派车辆。
9、优选的,所述步骤更新任务优先级包括:
10、按任务优先级从高到低,依次取出相应优先级下的所有任务列表,并依次更新优先级;
11、对于入库任务,计算任务已收到时间,若t1分钟未做,紧急度提升至1;若t2分钟未做,紧急度提升至2,其中,t1根据agv做两个任务循环所预计的时间设置,t2根据agv做三个任务循环所预计的时间设置,agv做一个任务循环依次包括agv取货架、带货架去工作站、工作站操作作业和agv带货架回存储区;
12、对于出库任务,基于wms下发的预计到达时间,计算任务剩余需完成时间,如还有t3分钟,紧急度提升至1,已经超期,紧急度提升至2,其中,t3根据agv取货架至工作站的送货工作时间设置。
13、优选的,t3设置为agv具有90-100%概率区间完成送货工作的时间。
14、优选的,所述步骤考虑出入库均衡作业,设定出入库任务派发的时间间隔包括:
15、出库任务和入库任务派发的时间间隔设置为1.5~2.5:1。
16、优选的,所述步骤按流量控制策略,筛选未安排agv的任务,当工作站当前已分配agv的任务数量达到上限,停止派车包括:
17、当工作站当前已分配agv的任务数量达到上限upbound,停止派车,其中,upbound的值在85%~115%*avedeliverytime/avehumantime的区间范围内,其中,avedeliverytime为agv送货架去工作区的平均时间,avehumantime为工作站内对货架作业的平均时间。
18、优选的,所述任务找车逻辑包括:
19、从需要分派agv的任务列表中,依次选择任务派车;
20、计算所有空闲agv与当前任务起点的距离;
21、从中选择距离值最短的车辆,安排做任务。
22、优选的,所述步骤计算所有空闲agv与当前任务起点的距离包括:
23、计算所有空闲agv与当前任务起点的曼哈顿距离,或
24、计算所有空闲agv与当前任务起点的考虑场地因素的路径距离。
25、优选的,所述任务找车逻辑包括:
26、对于需要分派agv的任务,计算所有任务与所有空闲agv的距离;
27、按照匈牙利算法,计算出任务与agv的最优分配。
28、优选的,包括rcs充电方法,rcs充电方法包括:
29、设置二级充电阈值,一级充电阈值和停止充电阈值三个充电阈值;
30、若agv电量大于二级小于一级,生成充电任务,若有未分配的wcs任务,则优先做wcs的任务;若agv电量低于二级阈值,则不接收wcs的任务;
31、不在线agv、有任务的agv、报错agv和状态为顶升的agv不产生充电任务;
32、寻找距离agv当前位置最近的、可利用的充电桩,一旦分配成功,则充电桩被占用;
33、agv达到停止充电阈值,自动分配停止充电任务,agv退出充电桩到充电桩前一个点,若存在wcs任务则立刻接收任务,若没有wcs任务则分配一个停车任务寻找最近的货架点停靠。
34、优选的,所述rcs充电方法包括:
35、对agv进行充电维护,多次充电后,做充电维护,充电到95%;
36、根据繁忙度对agv充电;以及
37、每5-15s根据agv上报的电量决定是否需要充电。
38、与现有技术相比,本发明的有益效果如下:
39、1、本发明提出的rcs派车方法,通过上位系统wcs下发作业任务,rcs系统通过处理任务总思想是任务找车,首先根据任务紧急度设定任务优先级,并获取流量控制条件下(包括每个工作站最多有几个任务以及任务均衡)最优先分配的任务,然后根据物流道口的距离寻找最近得可利用的车(车找任务),能够智能化派发任务,有效提高作业效率。
40、2、本发明根据任务优先级从高到低依次为任务分派agv,在执行搬运的过程中,agv小车能够根据出库任务和入库任务自动进行路径规划,从而到达指定工作区域进行货架搬运作业,实现智慧物流运输,解决了目前容易出现任务派发不及时,搬运任务找不到车辆,且缺少对任务优先级的划分,造成部分货物转运周期较长,使得物流货架负载较大,导致入库作业和出库作业难度增加的问题,因此能够大大提升物流转运效率,甚至agv派车的关键指标,agv平均收箱时间减少接近一半。
41、3、本发明获取流量控制条件下(包括每个工作站最多有几个任务以及任务均衡)最优先分配的任务,当工作站执行的任务达到上限时,不再派车,有效防止给一些工作站派车过多,导致其它工作站无车可用,以及设置出入库任务派发时间间隔,出库任务派发时间间隔小于入库任务派发时间间隔,实现先出再入,有效提高物流仓储周转效率。
42、本发明还提供了rcs充电方法,系统可以根据agv上报的电量来决定是否需要充电,并自动分配充电桩,从而形成循环式充电,使得充电桩的利用效率和agv的作业效率得到有效提升,同时可以优先处理紧急度高的任务,随后按派发间隔,依次做工作站的任务,并计算出任务与车辆的最优分配,极大的提高了货架搬运作业的工作效率。
- 还没有人留言评论。精彩留言会获得点赞!