目标建筑的3D模型构建方法和系统与流程
本发明涉及3d建模,具体涉及一种目标建筑的3d模型构建方法和目标建筑的3d模型构建系统。
背景技术:
1、相关技术中,在对目标建筑(例如,工厂厂区、车间等)进行3d建模时,需要依赖人工进行实地勘测,无法实现全自动建模,因此,效率较低,成本较高。
技术实现思路
1、本发明为解决上述技术问题,提供了一种目标场景的3d模型构建方法,能够实现全自动的目标建筑的3d建模,无需人工参与,因此,大大提高了建模的效率,降低了成本。
2、本发明采用的技术方案如下:
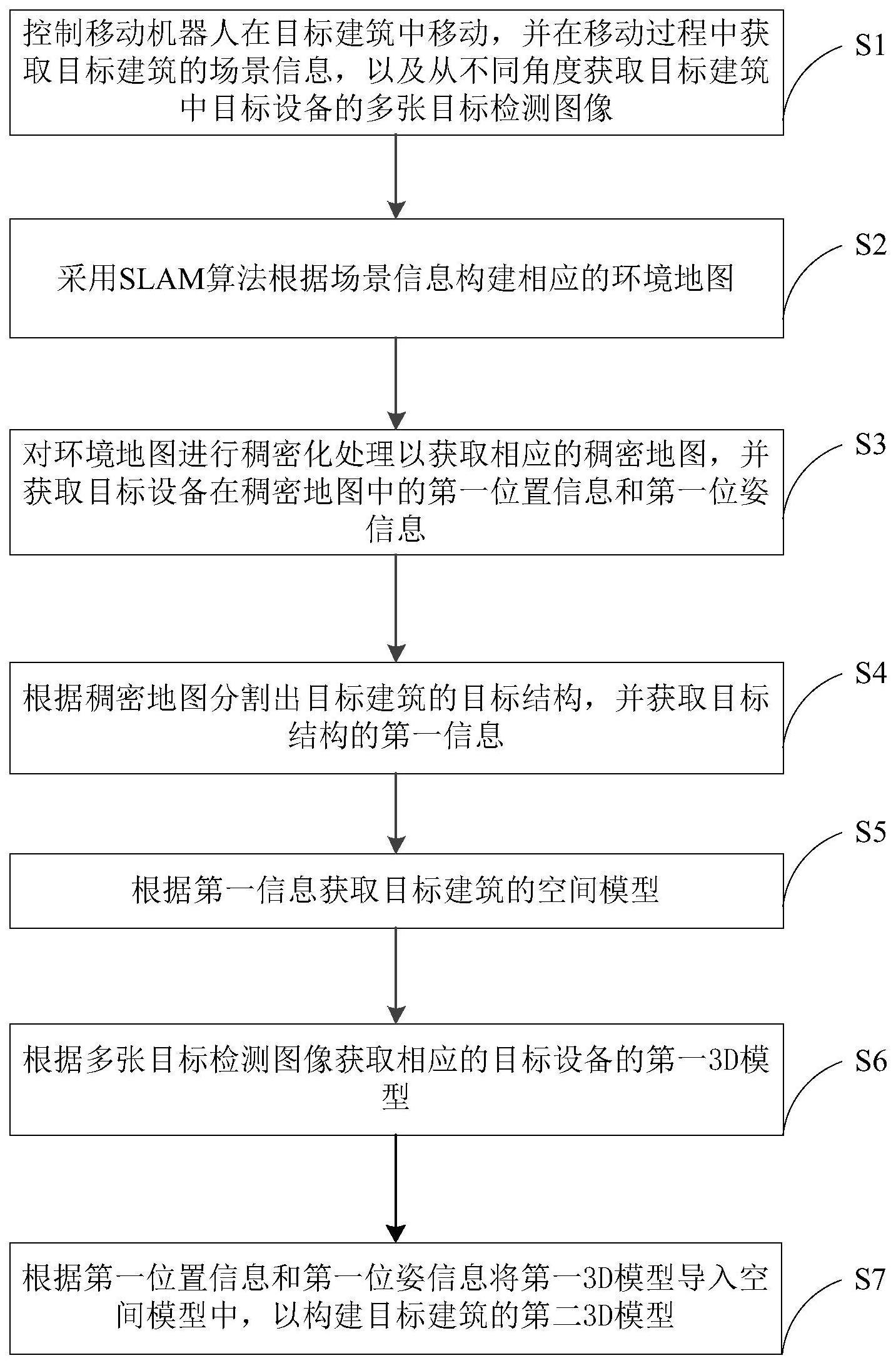
3、一种目标建筑的3d模型构建方法,包括以下步骤:控制移动机器人在目标建筑中移动,并在移动过程中获取所述目标建筑的场景信息,以及从不同角度获取所述目标建筑中目标设备的多张目标检测图像;采用slam算法根据所述场景信息构建相应的环境地图;对所述环境地图进行稠密化处理以获取相应的稠密地图,并获取所述目标设备在所述稠密地图中的第一位置信息和第一位姿信息;根据所述稠密地图分割出所述目标建筑的目标结构,并获取所述目标结构的第一信息;根据所述第一信息获取所述目标建筑的空间模型;根据多张所述目标检测图像获取相应的所述目标设备的第一3d模型;根据所述第一位置信息和所述第一位姿信息将所述第一3d模型导入所述空间模型中,以构建所述目标建筑的第二3d模型。
4、在本发明的一个实施例中,所述第一信息包括所述目标结构的第一类别信息、第一尺寸信息、第二位置信息和第二位姿信息。
5、在本发明的一个实施例中,根据所述第一信息获取所述目标建筑的所述空间模型,包括:根据所述第一类别信息设定相应的所述目标结构的属性参数;根据所述第一尺寸信息生成相应的所述目标结构的空间结构;根据所述第二位置信息、所述第二位姿信息、所述属性参数和所述空间结构获取所述空间模型。
6、一种目标建筑的3d模型构建系统,包括:第一获取模块,所述第一获取模块用于控制移动机器人在目标建筑中移动,并在移动过程中获取所述目标建筑的场景信息,以及从不同角度获取所述目标建筑中目标设备的多张目标检测图像;第一构建模块,所述第一构建模块用于采用slam算法根据所述场景信息构建相应的环境地图;第二获取模块,所述第二获取模块用于对所述环境地图进行稠密化处理以获取相应的稠密地图,并获取所述目标设备在所述稠密地图中的第一位置信息和第一位姿信息;第三获取模块,所述第三获取模块用于根据所述稠密地图分割出所述目标建筑的目标结构,并获取所述目标结构的第一信息;第四获取模块,所述第四获取模块用于根据所述第一信息获取所述目标建筑的空间模型;第五获取模块,所述第五获取模块用于根据多张所述目标检测图像获取相应的所述目标设备的第一3d模型;第二构建模块,所述第二构建模块用于根据所述第一位置信息和所述第一位姿信息将所述第一3d模型导入所述空间模型中,以构建所述目标建筑的第二3d模型。
7、一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实现上述的目标建筑的3d模型构建方法。
8、一种非临时性计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述的目标建筑的3d模型构建方法。
9、本发明的有益效果:
10、本发明能够实现全自动的目标建筑的3d建模,无需人工参与,因此,大大提高了建模的效率,降低了成本。
技术特征:
1.一种目标建筑的3d模型构建方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的目标建筑的3d模型构建方法,其特征在于,所述第一信息包括所述目标结构的第一类别信息、第一尺寸信息、第二位置信息和第二位姿信息。
3.根据权利要求2所述的目标建筑的3d模型构建方法,其特征在于,根据所述第一信息获取所述目标建筑的所述空间模型,包括:
4.一种目标建筑的3d模型构建系统,其特征在于,包括:
5.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时,实现根据权利要求1-3中任一项所述的目标建筑的3d模型构建方法。
6.一种非临时性计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现根据权利要求1-3中任一项所述的目标建筑的3d模型构建方法。
技术总结
本发明提供一种目标建筑的3D模型构建方法和系统,该方法包括:控制移动机器人在目标建筑中移动,并在移动过程中获取目标建筑的场景信息,以及从不同角度获取目标建筑中目标设备的多张目标检测图像;采用SLAM算法根据场景信息构建相应的环境地图;对环境地图进行稠密化处理以获取相应的稠密地图,并获取目标设备在稠密地图中的第一位置信息和第一位姿信息;根据稠密地图分割出目标建筑的目标结构,并获取目标结构的第一信息;根据第一信息获取目标建筑的空间模型;根据多张目标检测图像获取相应的目标设备的第一3D模型;根据第一位置信息和第一位姿信息将第一3D模型导入空间模型中,以构建目标建筑的第二3D模型。由此,建模的效率较高。
技术研发人员:王莹,马元巍,潘正颐,侯大为,倪文渊
受保护的技术使用者:常州微亿智造科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!