一种电能表误差状态评估方法、系统、设备及存储介质与流程
本发明涉及一种电能表误差状态评估方法、系统、设备及存储介质,属于电能计量设备状态评估。
背景技术:
1、电力系统的稳定运行依赖于各种电力设备,其中电能表是电力系统运行中的重要计量设备,用于测量用电量以及传输数据。随着电能表更新迭代越来越快,精密程度越来越高,其功能也更加多样化、模块化,倘若超差的电能表得不到及时处理,将对电力系统稳定运行产生严重影响,因此准确快速识别电能表误差状态对维护电力系统正常运行、提高电表检修效率有重要意义。
2、现有技术如公开号为“cn105158723b”的发明专利公开了一种基于多参量退化模型的数字化电能计量系统误差评估方法,通过在变电站各个关键部位安装的传感器,获取数字化电能计量装置运行环境数据,采用基于多参量退化模型评估方法,评估数字化电能计量系统的误差状态,实现数字电能计量系统真正意义上的状态监测及检修。但是上述方案是人为选择了环境温度、湿度、电网频率、谐波四个影响因素进行评估,选择影响因素的方式并不客观,仅考量了数据稳定性,并未考量其他影响因素对电能计量系统也存在影响,导致了评估结果准确性较低,因此,如何根据大量种类的影响因素中客观、合适的进行电能计量设备误差状态评估是一个急需解决的技术问题。
技术实现思路
1、为了解决上述现有技术中存在的问题,本发明提出了一种电能表误差状态评估方法、系统、设备及存储介质。
2、本发明的技术方案如下:
3、一方面,本发明提供一种电能表误差状态评估方法,包括以下步骤:
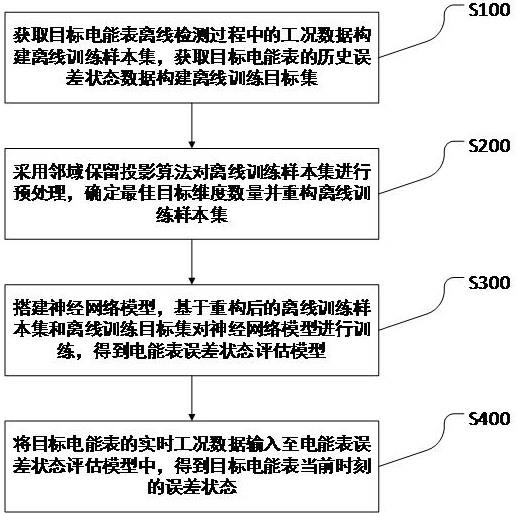
4、获取目标电能表离线检测过程中的工况数据构建离线训练样本集,获取目标电能表的历史误差状态数据构建离线训练目标集;所述离线训练样本集包括d个维度的影响因素;
5、采用邻域保留投影算法对离线训练样本集进行预处理,使得离线训练样本集中每一样本的影响因素降维至d个,并通过探路者算法对目标维度的数量d进行寻优处理,确定目标维度数量,基于目标维度数量重构离线训练样本集;
6、搭建神经网络模型,基于重构后的离线训练样本集和离线训练目标集对神经网络模型进行训练,得到电能表误差状态评估模型;
7、将目标电能表的实时工况数据输入至电能表误差状态评估模型中,得到目标电能表当前时刻的误差状态。
8、作为优选实施方式,所述采用邻域保留投影算法对离线训练样本集进行预处理的方法具体为:
9、确定离线训练样本集为,其中,表示离线训练样本集中的第i个样本,n为样本数量,,r表示维度为d的域,即每个样本含有d个维度的影响因素,则样本在低维度的映射表示为,其中,为第i个样本在低维度的映射表示,,d为目标维度的数量,且d≤d;映射方式表示为:
10、;
11、其中,a为投影矩阵,为投影矩阵的转置;
12、求解投影矩阵步骤如下:
13、计算样本间的欧式距离,构造样本集的距离矩阵ed:
14、;
15、寻找样本点的k个近邻点,通过对距离矩阵ed的每一列按数值从小到大进行升序排列,删除距离矩阵ed的第一行,然后选择距离矩阵ed中每列的前k个元素作为该列对应样本的k个近邻点;
16、计算邻域权值矩阵,定义误差函数为:
17、;
18、;
19、其中,表示样本对应的邻域权值向量,表示样本的第j个近邻点;是到之间的权值,求解每个样本点的权值向量,然后根据近邻点对应位置扩展成n×n的矩阵邻域权值矩阵;
20、在低维空间重构样本集y,使样本集y拥有和高维的样本集x相同的邻域结构,定义代价函数,并使代价函数最小化:
21、;
22、将代入上式,并在限制条件下,采用lagrange拉格朗日乘子法解算出投影矩阵a;
23、根据求解出的投影矩阵a计算低维的重构样本集y。
24、作为优选实施方式,所述通过探路者算法对目标维度的数量d进行寻优处理,确定目标维度数量的方法具体为:
25、将电能表误差状态评估模型的模型精度作为寻找目标维度数量的目标函数,具体为:
26、;
27、其中,tp表示被检索到正样本的数量;tn表示未被检索到正样本的数量;all表示所有样本的数量;
28、初始化探路者算法的算法参数;
29、初始化种群,为每一个种群赋予一个随机的d值,计算适应度值,确定探路者和跟随者;所述适应度值的计算公式为上述目标函数;
30、根据下式更新探路者位置:
31、;
32、;
33、其中,k表示算法当前的迭代代数;为算法的最大迭代代数;表示当代探路者的位置;表示上一代探路者的位置;表示探路者更新后的位置;为探路者移动的步长因子,在范围[0,1]内服从均匀分布;表示探路者移动的多向性和随机性;多向性由的取值决定;步长大小的随机性由决定;
34、根据下式更新跟随者位置:
35、;
36、;
37、;
38、;
39、;
40、其中,k表示算法当前的迭代代数;表示当代跟随者的当前位置,表示其他跟随者的当前位置;表示当代跟随者更新后的位置;表示跟随者之间的相互作用系数;表示探路者对跟随者的吸引系数;、分别为与其他跟随者移动的步长因子和与其他探路者移动的步长因子,、均为[0,1]范围内的随机数;表示跟随者移动的随机性,取[-1,1]范围内的随机数,决定随机运动的方向,为当前跟随者与其他跟随者之间的距离;
41、计算探路者和跟随者位置更新后的适应度值,并更新全局最优值;当适应值最大时,此时对应的探路者所代表的d值为最佳目标维度的数量;
42、判断是否达到结束条件,如果达到则输出最佳目标维度的数量,否则重复上述步骤。
43、作为优选实施方式,所述神经网络模型采用集成多关系图神经网络。
44、另一方面,本发明还提供一种电能表误差状态评估系统,包括:
45、数据集构建模块,用于获取目标电能表离线检测过程中的工况数据构建离线训练样本集,获取目标电能表的历史误差状态数据构建离线训练目标集;所述离线训练样本集包括d个维度的影响因素;
46、样本降维模块,用于采用邻域保留投影算法对离线训练样本集进行预处理,使得离线训练样本集中每一样本的影响因素降维至d个,并通过探路者算法对目标维度的数量d进行寻优处理,确定目标维度数量,基于目标维度数量重构离线训练样本集;
47、模型建立模块,用于搭建神经网络模型,基于重构后的离线训练样本集和离线训练目标集对神经网络模型进行训练,得到电能表误差状态评估模型;
48、评估模块,用于将目标电能表的实时工况数据输入至电能表误差状态评估模型中,得到目标电能表当前时刻的误差状态。
49、作为优选实施方式,所述样本降维模块采用邻域保留投影算法对离线训练样本集进行预处理的方法具体为:
50、确定离线训练样本集为,其中,表示离线训练样本集中的第i个样本,n为样本数量,,r表示维度为d的域,即每个样本含有d个维度的影响因素,则样本在低维度的映射表示为,其中,为第i个样本在低维度的映射表示,,d为目标维度的数量,且d≤d;映射方式表示为:
51、;
52、其中,a为投影矩阵,为投影矩阵的转置;
53、求解投影矩阵步骤如下:
54、计算样本间的欧式距离,构造样本集的距离矩阵ed:
55、;
56、寻找样本点的k个近邻点,通过对距离矩阵ed的每一列按数值从小到大进行升序排列,删除距离矩阵ed的第一行,然后选择距离矩阵ed中每列的前k个元素作为该列对应样本的k个近邻点;
57、计算邻域权值矩阵,定义误差函数为:
58、;
59、;
60、其中,表示样本对应的邻域权值向量,表示样本的第j个近邻点;是到之间的权值,求解每个样本点的权值向量,然后根据近邻点对应位置扩展成n×n的矩阵邻域权值矩阵;
61、在低维空间重构样本集y,使样本集y拥有和高维的样本集x相同的邻域结构,定义代价函数,并使代价函数最小化:
62、;
63、将代入上式,并在限制条件下,采用lagrange拉格朗日乘子法解算出投影矩阵a;
64、根据求解出的投影矩阵a计算低维的重构样本集y。
65、作为优选实施方式,所述样本降维模块通过探路者算法对目标维度的数量d进行寻优处理,确定目标维度数量的方法具体为:
66、将电能表误差状态评估模型的模型精度作为寻找目标维度数量的目标函数,具体为:
67、;
68、其中,tp表示被检索到正样本的数量;tn表示未被检索到正样本的数量;all表示所有样本的数量;
69、初始化探路者算法的算法参数;
70、初始化种群,为每一个种群赋予一个随机的d值,计算适应度值,确定探路者和跟随者;所述适应度值的计算公式为上述目标函数;
71、根据下式更新探路者位置:
72、;
73、;
74、其中,k表示算法当前的迭代代数;为算法的最大迭代代数;表示当代探路者的位置;表示上一代探路者的位置;表示探路者更新后的位置;为探路者移动的步长因子,在范围[0,1]内服从均匀分布;表示探路者移动的多向性和随机性;多向性由的取值决定;步长大小的随机性由决定;
75、根据下式更新跟随者位置:
76、;
77、;
78、;
79、;
80、;
81、其中,k表示算法当前的迭代代数;表示当代跟随者的当前位置,表示其他跟随者的当前位置;表示当代跟随者更新后的位置;表示跟随者之间的相互作用系数;表示探路者对跟随者的吸引系数;、分别为与其他跟随者移动的步长因子和与其他探路者移动的步长因子,、均为[0,1]范围内的随机数;表示跟随者移动的随机性,取[-1,1]范围内的随机数,决定随机运动的方向,为当前跟随者与其他跟随者之间的距离;
82、计算探路者和跟随者位置更新后的适应度值,并更新全局最优值;当适应值最大时,此时对应的探路者所代表的d值为最佳目标维度的数量;
83、判断是否达到结束条件,如果达到则输出最佳目标维度的数量,否则重复上述步骤。
84、作为优选实施方式,所述神经网络模型采用集成多关系图神经网络。
85、再一方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如本发明任一实施例所述的电能表误差状态评估方法。
86、再一方面,本发明还提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本发明任一实施例所述的电能表误差状态评估方法。
87、本发明具有如下有益效果:
88、本发明一种电能表误差状态评估方法,通过采用邻域保留投影算法对训练样本的影响因素维度进行降维处理,并采用探路者算法对邻域保留投影算法的目标降维维数进行寻优,确定了最佳目标降维维数,提高了评估模型的精度,实现了电能表的误差实时在线评估,进而实现了电能表的精准运维。
- 还没有人留言评论。精彩留言会获得点赞!