基于深度学习的闸调器拉杆头丢失故障图像识别方法及系统与流程
本发明涉及图像处理,具体为基于深度学习的闸调器拉杆头丢失故障图像识别方法及系统。
背景技术:
1、dab闸调器拉杆头丢失故障是一种危及行车安全的故障,在dab闸调器拉杆头丢失故障检测中,采用人工检查图像的方式进行故障检测。采用图像自动识别的方式可提高检测效率和稳定性。近几年,深度学习与人工智能不断发展,在技术上不断成熟。采用深度学习进行dab闸调器拉杆头丢失故障识别,可以有效提高检测准确率。但由于dab闸调器图像背景较为杂乱,相似部位较多,采用传统的cascade-rcnn深度学习网络进行故障检测的准确程度较低。
技术实现思路
1、本发明的目的是:针对现有技术中闸调器拉杆头丢失故障识别准确率低的问题,提出基于深度学习的闸调器拉杆头丢失故障图像识别方法及系统。
2、本发明为了解决上述技术问题采取的技术方案是:
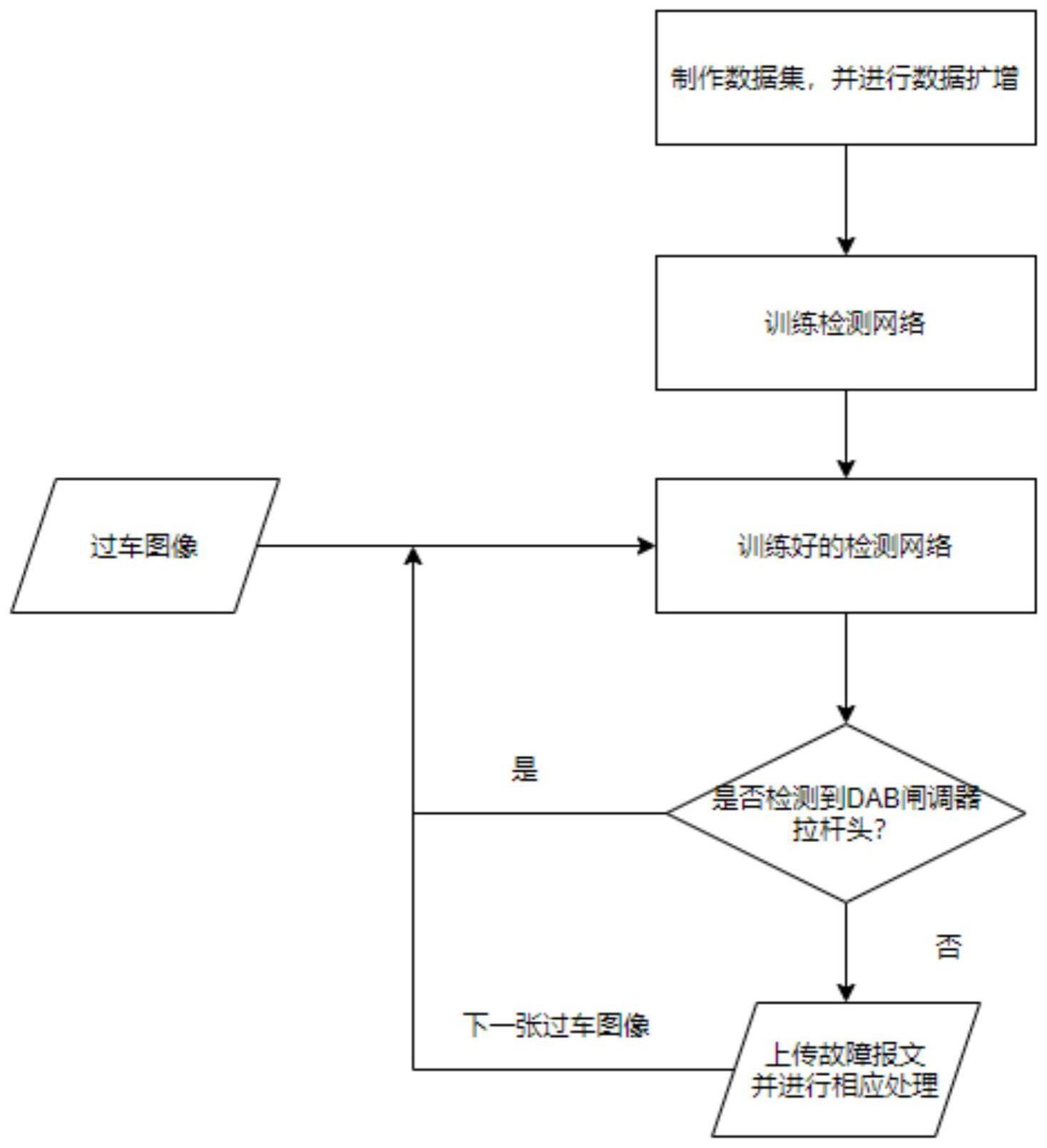
3、基于深度学习的闸调器拉杆头丢失故障图像识别方法,包括以下步骤:
4、步骤一:获取dab闸调器拉杆头区域图像;
5、步骤二:将dab闸调器拉杆头区域图像中闸调器拉杆头图像进行标记,以此构建数据集;
6、步骤三:对数据集进行数据扩增;
7、步骤四:利用数据扩增后的数据集训练dab闸调器拉杆头丢失检测网络;
8、步骤五:利用训练好的dab闸调器拉杆头丢失检测网络对待识别图像进行识别;
9、dab闸调器拉杆头丢失检测网络为改进的cascade-rcnn网络,改进的cascade-rcnn网络通过resnet50残差网络进行卷积,改进的cascade-rcnn网络具体执行如下步骤:
10、输入图像首先经过conv1进行特征提取,然后通过3×3最大池化,生成特征图;
11、conv1生成的特征图输入conv2中进行特征提取,然后通过3×3最大池化,生成特征图;
12、conv2生成的特征图输入conv3中进行特征提取,然后通过3×3最大池化,生成特征图;
13、conv3生成的特征图输入conv4中进行特征提取,然后通过3×3最大池化,生成特征图;
14、conv4生成的特征图输入conv5中进行特征提取,然后通过3×3最大池化,生成特征图;
15、conv2、conv3、conv4和conv5中输入的特征图先通过1×1的卷积对特征图像进行降维,然后经过3×3的卷积,最后通过1×1卷积恢复维度,输出通道数为256;
16、conv2生成的特征图作为特征图a;
17、特征图a经过下采样后与conv3生成的特征图进行融合,作为特征图b;
18、特征图b经过下采样后与conv4生成的特征图进行融合,作为特征图c;
19、特征图c经过下采样后与conv5生成的特征图进行融合,作为特征图d;
20、特征图d经过上采样后与特征图c融合,作为特征图cc;
21、特征图cc经过上采样后与特征图b融合,作为特征图bb;
22、特征图bb经过上采样后与特征图a融合,作为特征图aa;
23、将特征图bb、特征图cc以及特征图d输入主干网络,作为公共特征图;
24、将特征图aa经过下采样后与特征图bb融合,作为特征图bbb;
25、将特征图bbb经过下采样后与特征图cc融合,作为特征图ccc;
26、将特征图ccc经过下采样后与特征图dd融合,作为特征图ddd;
27、将特征图aa、特征图bbb、特征图ccc以及特征图ddd进行roi池化后输出类别和位置,即为检测结果。
28、进一步的,resnet50残差网络的激活函数为elu,表示为:
29、激活函数elu表示为:
30、
31、其中a为一个(1,+∞)区间内的固定参数,x为函数横轴坐标,ex为x的指数函数。
32、进一步的,改进的cascade-rcnn网络的损失函数为diou loss,表示为:
33、
34、其中,c为预测框与真实框对角线距离,d为预测框与真实框中心点距离。
35、进一步的,数据扩增包括:平移、缩放、亮度调整。
36、进一步的,dab闸调器拉杆头区域图像为灰度图像。
37、基于深度学习的闸调器拉杆头丢失故障图像识别系统,包括:数据获取模块、数据扩增模块以及检测模块;
38、数据获取模块用于获取dab闸调器拉杆头区域图像,并将dab闸调器拉杆头区域图像中闸调器拉杆头图像进行标记,以此构建数据集;
39、数据扩增模块用于对数据集进行数据扩增;
40、检测模块用于利用数据扩增后的数据集训练dab闸调器拉杆头丢失检测网络,并利用训练好的dab闸调器拉杆头丢失检测网络对待识别图像进行识别;
41、dab闸调器拉杆头丢失检测网络为改进的cascade-rcnn网络,改进的cascade-rcnn网络通过resnet50残差网络进行卷积,改进的cascade-rcnn网络具体执行如下步骤:
42、输入图像首先经过conv1进行特征提取,然后通过3×3最大池化,生成特征图,conv1-conv5的卷积核为7×7,滑动步长为2,填充为3,输出通道数为64;
43、conv1生成的特征图输入conv2中进行特征提取,然后通过3×3最大池化,生成特征图;
44、conv2生成的特征图输入conv3中进行特征提取,然后通过3×3最大池化,生成特征图;
45、conv3生成的特征图输入conv4中进行特征提取,然后通过3×3最大池化,生成特征图;
46、conv4生成的特征图输入conv5中进行特征提取,然后通过3×3最大池化,生成特征图;
47、conv2、conv3、conv4和conv5中输入的特征图先通过1×1的卷积对特征图像进行降维,然后经过3×3的卷积,最后通过1×1卷积恢复维度,输出通道数为256;
48、conv2生成的特征图作为特征图a;
49、特征图a经过下采样后与conv3生成的特征图进行融合,作为特征图b;
50、特征图b经过下采样后与conv4生成的特征图进行融合,作为特征图c;
51、特征图c经过下采样后与conv5生成的特征图进行融合,作为特征图d;
52、特征图d经过上采样后与特征图c融合,作为特征图cc;
53、特征图cc经过上采样后与特征图b融合,作为特征图bb;
54、特征图bb经过上采样后与特征图a融合,作为特征图aa;
55、将特征图bb、特征图cc以及特征图d输入主干网络,作为公共特征图;
56、将特征图aa经过下采样后与特征图bb融合,作为特征图bbb;
57、将特征图bbb经过下采样后与特征图cc融合,作为特征图ccc;
58、将特征图ccc经过下采样后与特征图dd融合,作为特征图ddd;
59、将特征图aa、特征图bbb、特征图ccc以及特征图ddd进行roi池化后输出类别和位置,即为检测结果。
60、进一步的,resnet50残差网络的激活函数为elu,表示为:
61、激活函数elu表示为:
62、
63、其中a为一个(1,+∞)区间内的固定参数,x为函数横轴坐标,ex为x的指数函数。
64、进一步的,改进的cascade-rcnn网络的损失函数为diou loss,表示为:
65、
66、其中,c为预测框与真实框对角线距离,d为预测框与真实框中心点距离。
67、进一步的,数据扩增包括:平移、缩放、亮度调整。
68、进一步的,dab闸调器拉杆头区域图像为灰度图像。
69、本发明的有益效果是:
70、本技术将panet和rfp网络进行结合,提出一种新的fpn-a网络,使得特征图中增加了更加丰富的特征信息,进而提升了闸调器拉杆头丢失故障识别的准确率。
- 还没有人留言评论。精彩留言会获得点赞!