一种恒定推力模式持续机动卫星的轨道预报方法与流程
本发明属于航天测量与控制,具体涉及一种恒定推力模式持续机动卫星的轨道预报方法。
背景技术:
1、近年来,随着高度集成化和自动化航天技术快速发展、发射成本持续降低、市场需求不断扩大,巨型星座的研发和部署掀起前所未有的热潮,星座的发展逐渐从低轨卫星通信星座转向低轨巨型星座。巨型星座一般指卫星部署数量超过100颗的星座,而太空探索(spacex)公司的“星链”计划部署约42000颗,并通过500万个地面终端实现地球全覆盖,是最具代表性、最受关注的巨型星座计划。
2、为节约星座建造成本,这些卫星一般采用一箭多星的方式发射入轨,入轨高低一般较低,入轨后采用持续小推力的方式逐步抬升轨道至正常服务轨道。卫星持续抬轨或降轨时,可能采用恒定推力模式,即每天达到固定的轨道高度变化量,这种机动方式也可称为恒定半长轴变率模式的机动方式。以第17批星链卫星为例,基于space-track网站公开发布的tle根数,入轨后该批60颗卫星的轨道高度变化情况如图1所示,其中每一条线表示一颗卫星的轨道高度变化,颜色相同为同一组卫星,最终部署于同一个轨道面,此批卫星从380km高度抬升至550 km高度耗时约29天,每天轨道变化量基本相同,均为6.8 km左右。
3、虽然轨道高度日变化量相同,但是具体的轨控策略是未知的。对于小推力卫星而言,持续变轨期间每日点火时长超过万秒,推力大小可大致估算,但点火动时段分配未知,甚至可能是固定变轨量模式下的随机点火策略,导致轨道预报误差很大。以星链-2305为例,该卫星于2021年3月24日发射入轨,2021年10月16日至11月18日处于持续机动状态,轨道高度逐渐从350 km抬升至550 km,平均每天抬升约6.0 km。使用内符合法分析该卫星持续机动期间spacex公司发布的tle根数的精度,结果如图2-3和表1所示,其中,r、t、n分别表示卫星轨道坐标系中的径向、切向和法向方向,、、分别表示对应方向的误差。
4、表1. 星链-2305的tle精度统计(单位:km)
5、
6、可以看到,tle预报1天位置误差约8 km,预报2天位置误差约62 km,预报误差大,且置信期很短,一旦超过24小时,误差急剧增大,难以满足应用需求。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种恒定推力模式持续机动卫星的轨道预报方法。本发明要解决的技术问题通过以下技术方案实现:
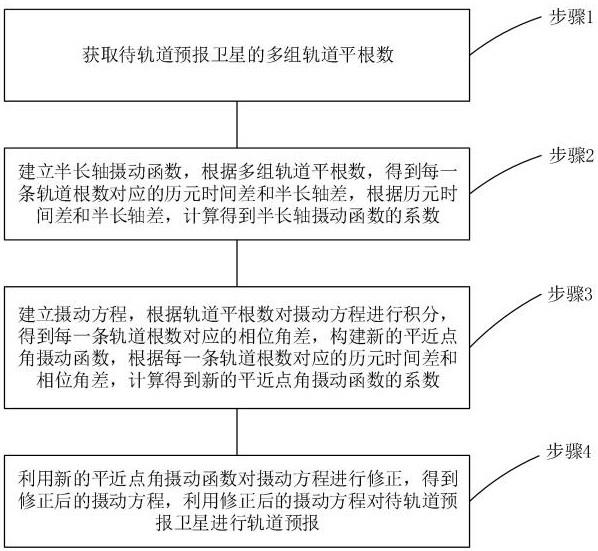
2、本发明提供了一种恒定推力模式持续机动卫星的轨道预报方法,包括:
3、步骤1:获取待轨道预报卫星的多组轨道平根数;
4、步骤2:建立半长轴摄动函数,根据所述多组轨道平根数,得到每一条轨道根数对应的历元时间差和半长轴差,根据所述历元时间差和半长轴差,计算得到所述半长轴摄动函数的系数;
5、步骤3:建立摄动方程,根据所述轨道平根数对所述摄动方程进行积分,得到每一条轨道根数对应的相位角差,构建新的平近点角摄动函数,根据每一条轨道根数对应的历元时间差和相位角差,计算得到所述新的平近点角摄动函数的系数;
6、步骤4:利用所述新的平近点角摄动函数对所述摄动方程进行修正,得到修正后的摄动方程,利用所述修正后的摄动方程对待轨道预报卫星进行轨道预报。
7、在本发明的一个实施例中,在所述步骤1中,对所述待轨道预报卫星,按照历元时间顺序获取条轨道根数对应的轨道平根数,其中,第条轨道根数的轨道平根数表示为:
8、,;
9、式中,表示第条轨道根数的半长轴的平根数,表示第条轨道根数的偏心率的平根数,表示第条轨道根数的倾角的平根数,表示第条轨道根数的升交点赤经的平根数,表示第条轨道根数的近地点幅角的平根数,表示第条轨道根数的平近点角的平根数,表示轨道根数的个数。
10、在本发明的一个实施例中,所述步骤2包括:
11、步骤2.1:建立半长轴摄动函数如下:
12、;
13、式中,表示半长轴,表示时间,表示半长轴摄动函数的系数;
14、步骤2.2:依次计算得到第条轨道根数与第条轨道根数之间的历元时间差,其中,,,表示第条轨道根数的历元时间,表示第条轨道根数的历元时间,表示轨道根数的个数;
15、步骤2.3:依次计算得到第条轨道根数与第条轨道根数之间的半长轴差,其中,,,表示第条轨道根数的半长轴的平根数,表示第条轨道根数的半长轴的平根数;
16、步骤2.4:根据条轨道根数对应的历元时间差和半长轴差序列,利用最小二乘法求解得到所述半长轴摄动函数的系数。
17、在本发明的一个实施例中,所述步骤3包括:
18、步骤3.1:建立摄动方程如下:
19、;
20、式中,表示偏心率,表示倾角,表示升交点赤经,表示近地点幅角,表示平近点角,表示地球半径,表示平均运动速度,表示轨道半通径,表示地球引力场二阶带谐系数,表示地球引力场三阶带谐系数;
21、步骤3.2:从第条轨道根数开始,以预设步长对所述摄动方程进行积分,依次计算得到每一条轨道根数对应的历元时间的近地点幅角的积分值和平近点角的积分值;
22、步骤3.3:根据所述多组轨道平根数以及每一条轨道根数对应的历元时间的近地点幅角的积分值和平近点角的积分值,计算得到每一条轨道根数对应的相位角差,其中,第条轨道根数的相位角差按照下式计算得到:
23、,;
24、式中,表示第条轨道根数的近地点幅角的平根数,表示第条轨道根数的平近点角的平根数,表示第条轨道根数的近地点幅角的积分值,表示第条轨道根数的平近点角的积分值;
25、步骤3.4:构建新的平近点角摄动函数如下:
26、;
27、式中,表示新的平近点角摄动函数的第一系数,表示新的平近点角摄动函数的第二系数;
28、步骤3.5:根据条轨道根数对应的历元时间差和相位角差序列,利用最小二乘法求解得到所述新的平近点角摄动函数的第一系数和第二系数。
29、在本发明的一个实施例中,所述步骤4包括:
30、步骤4.1:利用所述新的平近点角摄动函数对所述摄动方程进行修正,得到修正后的摄动方程为:
31、;
32、步骤4.2:对所述修正后的摄动方程进行积分,得到预报时刻的所述待轨道预报卫星的轨道平根数积分结果,根据所述轨道平根数积分结果得到所述待轨道预报卫星在该预报时刻的空间位置及速度。
33、与现有技术相比,本发明的有益效果在于:
34、本发明的一种恒定推力模式持续机动卫星的轨道预报方法,基于半长轴和相位角修正的摄动方程进行轨道预报,提高了持续抬轨或降轨卫星的轨道预报精度,克服了持续机动卫星控制策略未知导致轨道预报误差偏大的问题。
35、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!