一种相机外参标定的方法、装置、设备及介质与流程
本发明涉及相机外参标定领域,并且更具体地涉及一种相机外参标定的方法、装置、设备及可读介质。
背景技术:
1、相机外参是用于表示相机在某相对坐标系中位置和姿态的一组数据,包括相对于坐标系的坐标和绕坐标系三个轴的旋转量,因此需要在相机固定在某相对坐标系之后,才能确定相机外参。最常用的外参标定方法是使用特制的标定板进行标定,该方法适用于室内简单环境,而一旦进入室外环境,由于背景复杂多变、空间限制、道路安全等问题,很难通过特制的标定板进行标定。
技术实现思路
1、有鉴于此,本发明实施例的目的在于提出一种相机外参标定的方法、装置、设备及可读介质,通过使用本发明的技术方案,能够无需在道路上部署特制标定板就能实现相机外参的标定,标定过程不需要人工参与,能够大幅提高标定效率,节约人力成本,能够提高标定结果的准确性和鲁棒性,降低噪音对标定结果的影响。
2、基于上述目的,本发明的实施例的一个方面提供了一种相机外参标定的方法,包括以下步骤:
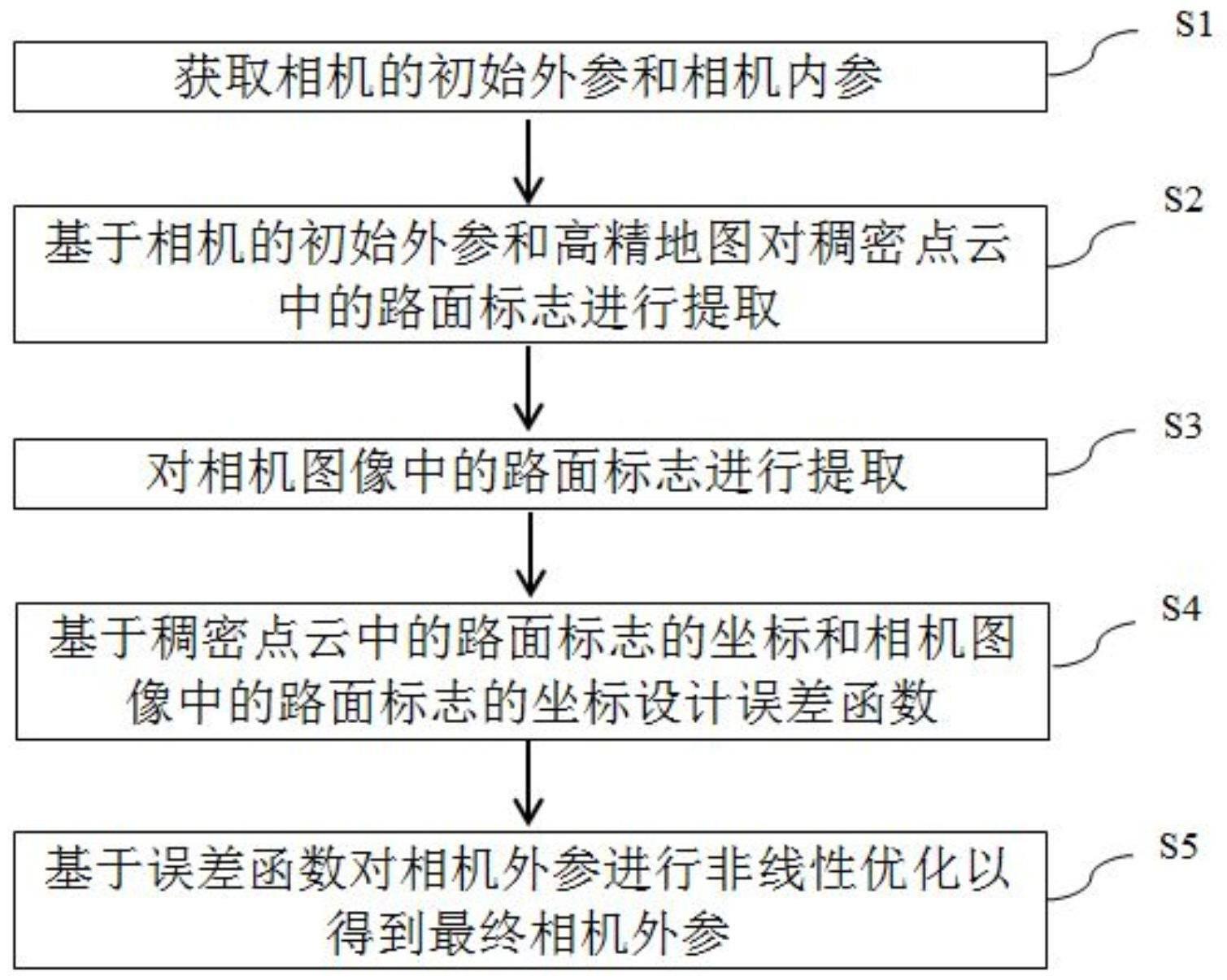
3、获取相机的初始外参和相机内参;
4、基于相机的初始外参和高精地图对稠密点云中的路面标志进行提取;
5、对相机图像中的路面标志进行提取;
6、基于稠密点云中的路面标志的坐标和相机图像中的路面标志的坐标设计误差函数;
7、基于误差函数对相机外参进行非线性优化以得到最终相机外参。
8、根据本发明的一个实施例,获取相机的初始外参和相机内参包括:
9、获取相机在坐标系下的初始位姿,并获取相机与水平面的夹角、相机的滚动角和相机的偏航角进而到相机的初始外参;
10、在室内使用标定板对相机进行标定以获得相机内参。
11、根据本发明的一个实施例,基于相机的初始外参和高精地图对稠密点云中的路面标志进行提取包括:
12、基于相机的初始位置和朝向定向加载高精地图中相应区域的路面标志,并将路面标志进行分类;
13、加载相应区域的稠密点云数据;
14、利用半径搜索算法遍历稠密点云数据,并提取出高精地图中路面标志分类中的每一类对应的稠密点云;
15、对每一类稠密点云进行过滤以得到稠密点云中的路面标志的三维点集。
16、根据本发明的一个实施例,基于相机的初始位置和朝向定向加载高精地图中相应区域的路面标志,并将路面标志进行分类包括:
17、在以相机初始位置为圆心,相机朝向的前方半径l米和角度2a°的扇形范围内定向加载高精地图中的路面标志,其中半径l覆盖相机照射区域,扇形角度2a°大于相机的视场角;
18、将路面标志分为黄色线、白色线和车道中心线。
19、根据本发明的一个实施例,利用半径搜索算法遍历稠密点云数据,并提取出高精地图中路面标志分类中的每一类对应的稠密点云包括:
20、遍历稠密点云数据dense_points,提取出距离车道边缘黄色线和白色线小于r1的稠密点云dense_yellow_lines和dense_white_lines;
21、提取出距离车道中心线小于r2的稠密点云dense_lane_marks。
22、根据本发明的一个实施例,对每一类稠密点云进行过滤以得到稠密点云中的路面标志的三维点集包括:
23、利用路面标志在激光雷达下反射率高的特点对三类稠密点云进行过滤,以得到最终的三类三维点集dense_yellow_points、dense_white_points和dense_lane_marks_points。
24、根据本发明的一个实施例,对相机图像中的路面标志进行提取包括:
25、将相机图像进行灰度处理以得到灰度图像;
26、使用最大类间分割算法对灰度图像进行计算以得出分割阈值t,并利用分割阈值t对灰度图像进行分割以得到像素值全部大于分割阈值t的新灰度图像,并将小于分割阈值t的像素点置零;
27、响应于非零像素点的个数大于总像素点个数的预设倍,用新灰度图像更新灰度图像并重复上一个步骤直至非零像素点的个数小于总像素点个数的预设倍;
28、将最终得到的灰度图像进行二值化处理,然后经过n次形态学闭操作和m次开操作去除噪点;
29、将相机图像转换到hsv色域空间,设置黄色点的阈值区间,并根据二值图非零值对应hsv图像像素值是否落在黄色区间将二值图像分为黄色区域二值图像和非黄色区域二值图像。
30、根据本发明的一个实施例,基于稠密点云中的路面标志的坐标和相机图像中的路面标志的坐标设计误差函数包括:
31、将地图坐标系下三维点转换到相机坐标系下的三维点,再映射成图像坐标系下的二维点;
32、在二值图像中搜索与映射点最近的点作为优化目标;
33、将y轴方向的权重设置为:weight_y = (y_c +) / y_max,其中y_max为图像的y轴方向尺寸,y_c为用于控制权重范围的常量,weight_y为y轴方向的权重;
34、将x轴方向的权重设置为:weight_x = x_c - abs(2*/x_max - 1),其中x_max为图像的x轴方向尺寸,x_c为用于控制权重范围常量,weight_x为x轴方向的权重;
35、将总的权重设置为w = a * weighti+ b * weight_x + c * weight_y,其中a、b、c用于控制权重比例的常量,weighti为每一类稠密点云的权重,w为总的权重;
36、误差函数定义为:,其中n为点云总数。
37、根据本发明的一个实施例,将地图坐标系下三维点转换到相机坐标系下的三维点,再映射成图像坐标系下的二维点包括:
38、使用转换公式:将地图坐标系下三维点映射成图像坐标系下的二维点,其中k为相机内参,为相机外参。
39、根据本发明的一个实施例,在二值图像中搜索与映射点最近的点作为优化目标包括:
40、点云中dense_yellow_points的映射点在黄色区域二值图像中搜索;
41、点云中dense_white_points和dense_lane_marks_points的映射点在非黄色区域二值图像中搜索。
42、根据本发明的一个实施例,基于误差函数对相机外参进行非线性优化以得到最终相机外参包括:
43、调整相机外参使误差函数的值最小以得到最终的相机外参。
44、本发明的实施例的另一个方面,还提供了一种相机外参标定的装置,装置包括:
45、获取模块,获取模块配置为获取相机的初始外参和相机内参;
46、第一提取模块,第一提取模块配置为基于相机的初始外参和高精地图对稠密点云中的路面标志进行提取;
47、第二提取模块,第二提取模块配置为对相机图像中的路面标志进行提取;
48、设定模块,设定模块配置为基于稠密点云中的路面标志的坐标和相机图像中的路面标志的坐标设计误差函数;
49、优化模块,优化模块配置为基于误差函数对相机外参进行非线性优化以得到最终相机外参。
50、本发明的实施例的另一个方面,还提供了一种计算机设备,该计算机设备包括:
51、至少一个处理器;以及
52、存储器,存储器存储有可在处理器上运行的计算机指令,指令由处理器执行时实现上述任意一项方法的步骤。
53、本发明的实施例的另一个方面,还提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时实现上述任意一项方法的步骤。
54、本发明具有以下有益技术效果:本发明实施例提供的相机外参标定的方法,通过获取相机的初始外参和相机内参;基于相机的初始外参和高精地图对稠密点云中的路面标志进行提取;对相机图像中的路面标志进行提取;基于稠密点云中的路面标志的坐标和相机图像中的路面标志的坐标设计误差函数;基于误差函数对相机外参进行非线性优化以得到最终相机外参的技术方案,能够无需在道路上部署特制标定板就能实现相机外参的标定,标定过程不需要人工参与,能够大幅提高标定效率,节约人力成本,能够提高标定结果的准确性和鲁棒性,降低噪音对标定结果的影响。
- 还没有人留言评论。精彩留言会获得点赞!