一种多层图像分割及目标轮廓缺陷检测方法及设备与流程
本发明涉及图像缺陷检测领域,尤其涉及一种多层图像分割及目标轮廓缺陷检测方法及设备。
背景技术:
1、在工业生产中,图像缺陷检测具有重要的使用价值,随着制造技术的不断发展和工业化的快速推进,产品质量对于企业的竞争力越来越重要。在制造业中,产品的质量问题一直是生产过程中必须面对的重要问题。其中,产品的缺陷问题是制造业中常见的问题之一,缺陷可能会导致产品的性能不稳定,甚至使得产品无法正常使用,给消费者带来不良的用户体验和安全隐患。缺陷检测技术是在制造过程中实现产品质量控制的重要手段之一,它可以在生产过程中及时发现和处理产品中的缺陷问题。目前,随着图像识别等技术的不断发展和应用,缺陷检测技术也在不断提高和完善。开发高效、准确、可靠的缺陷检测技术,对于提高产品质量、降低生产成本、提高企业竞争力具有重要意义。现有技术存在如下不足:
2、(1)对于不同类型目标轮廓的检测能力不同:不同类型的缺陷需要不同的检测技术,但现有的技术往往只擅长于检测特定类型的缺陷,难以全面覆盖所有可能存在的缺陷类型。
3、(2)分割交界线存在缺陷:传统图像分割所采用的计算方法而由于像素点的横坐标通常只能去取到整数点,导致在交线处的直线不一定是一条光滑的直线,可能会出现间断的情况,导致最终在计算面积的过程中出现误差。
4、(3)人工标注成本高:缺陷检测技术需要大量的标注数据来进行验证,但人工标注数据的成本往往很高,所以当待检测样本较大时,要对检测结果进行校对工作量较大。
5、(4)图像信息应用不全:现有检测方法的信息运用不全面,导致检测的正确率不够高。
技术实现思路
1、为了解决上述问题,本发明提供了一种多层图像分割及目标轮廓缺陷检测方法及设备,能有效满足高速、准确度高等需求。
2、一种多层图像分割及目标轮廓缺陷检测方法,主要包括:
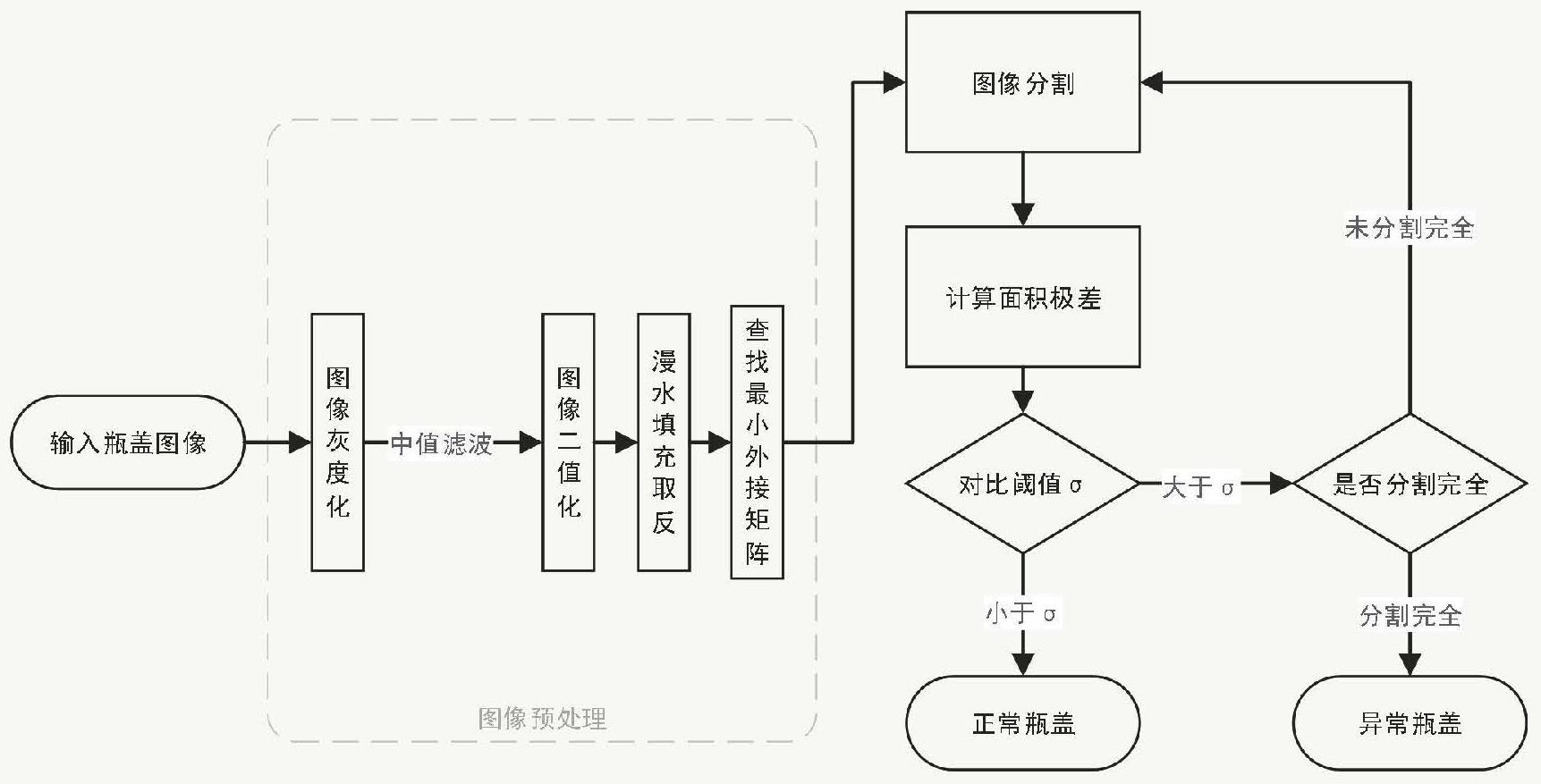
3、s1:输入待检测的目标图像,对其进行预处理,所述预处理包括:图像灰度化处理,二值化处理,取反处理和查找最小外接矩阵;
4、s2:对完成预处理后的图像进行分割处理;
5、s3:对分割后的图像进行各个分块的面积计算,并计算面积的极差;
6、s4:将极差与阈值进行对比,判断极差是否大于阈值,若是,则到步骤s5,若否,则判断目标图像轮廓为正常状态;
7、s5:判断目标图像轮廓是否分割完全,若是,则目标图像轮廓为异常状态,若否,则回到步骤s2。
8、进一步地,预处理的具体实现步骤为:
9、s11:遍历所有读入的图像;
10、s12:对图像灰度化处理,通过颜色空间转换将rgb图像转换为灰度图像,并用中值滤波器对灰度图像进行处理;
11、s13:对处理后的图像进行阈值变换,将灰度图像进行二值化处理,转变为黑白图,并对黑白图像进行取反处理;
12、s14:取反处理后,查找目标图像的轮廓,返回最外层边界,找到边界的最小外接矩阵,并判断最小外接矩阵是否满足分割条件,如果不能被等分分割,则要先改变最小外接矩形的宽高使得矩形能够被等分分割。
13、进一步地,利用如下公式进行图像灰度化处理:
14、i(x,y)=0.114×r(x,y)+0.587×g(x,y)+0.298×b(x,y) (1)
15、式中,i(x,y)是像素点(x,y)进行灰度变换之后所对应的灰度值,r(x,y)、g(x,y)、b(x,y)分别表示rgb图像在红色、绿色和蓝色通道内像素点对应的值。
16、进一步地,二值化处理公式为:
17、
18、式中,i(x,y)表示原图中像素点(x,y)所对应的像素值,i(x,y)表示二值化后像素点(x,y)对应的的像素值。
19、进一步地,对二值化后的图像进行取反,并将取反后的图像保存为一张新图像,用漫水填充法对图像外部进行填充,将填充后的图像与原图像求并集,从而得到填充完毕的二值图;其步骤如式(3)、(4)所示:
20、m(x,y)=floor(neg(i(x,y))) (3)
21、gr(x,y)=i(x,y)∪m(x,y) (4)
22、式中,gr(x,y)表示图像进行并集操作后像素点(x,y)所对应的灰度值,i(x,y)表示二值化后像素点(x,y)对应的的像素值,m(x,y)表示对图像进行变换后像素点(x,y)所对应的灰度值,neg(·)表示对图像进行取反操作,floor(·)表示对图像进行漫水填充。
23、进一步地,步骤s14的具体实现过程为:
24、s14.1:如果矩阵高不满足分割条件,则将矩阵的高加一,并转向步骤s14;
25、s14.2:如果矩阵宽不满足分割条件,则将矩阵的宽加一,并转向步骤s14;
26、s14.3:如果矩阵的长宽均满足分割条件,则返回最小外接矩阵所包含的图像。
27、进一步地,步骤s14中最小外接矩形被等分分割的基本步骤如式(5)所示:
28、
29、式中,staxnew、staxold分别表示更新后的最小外接矩阵在x轴上的起点坐标、原最小外接矩阵在x轴上的起点坐标,endxnew、endxold分别表示更新后的最小外接矩阵在x轴上的终点坐标、原最小外接矩阵在x轴上的终点坐标,x表示图像起终点坐标,y表示图像起终点坐标,staynew、stayold分别表示更新后的最小外接矩阵在x轴上的起点坐标、原最小外接矩阵在x轴上的起点坐标,endynew、endyold分别表示更新后的最小外接矩阵在y轴上的终点坐标、原最小外接矩阵在y轴上的终点坐标。
30、进一步地,图像的分割处理步骤为:
31、s21:将返回的最小外接矩阵包含的图像沿矩阵高的中线进行分割,并将矩阵的下半部分拼接到图像的右边,同时将拼接后的图像进行分割,从左到右依次取得四块大小相等的分块;
32、s22:将四个矩阵块分别沿其各自的主对角线进行分割,将图像均分成八块三角矩阵;
33、s23:计算出最大面积和最小面积的差值,即得到极差一,对比阈值σ,若极差大于该阈值σ,则遍历每个三角矩阵,找到目标轮廓的十六等分线,遍历所有上三角矩阵的所有像素点,判断和直线的位置关系,从而将所有的上三角矩阵分成两块;同理,遍历所有的下三角矩阵,找到十六等分线,沿着等分线将目标轮廓分成十六份,计算各部分的面积,同时计算极差二,对比极差二和阈值σ的大小,若极差二依然大于阈值σ,则判断该目标图像轮廓为不正常状态,反之则认为目标图像轮廓正常,输出结果。
34、进一步地,图像分割公式为:
35、
36、line(x)=kx+b
37、其中,p(x,y)表示分割后图像在像素点(x,y)处的像素值,line(x)表示横坐标为x在原图16等分线上所对的纵坐标,gr(x,y)表示图像进行并集操作后像素点(x,y)所对应的灰度值,k,b分别表示直线的斜率和截距。
38、一种多层图像分割及目标轮廓缺陷检测设备,包括:处理器及所述存储设备;所述处理器加载并执行所述存储设备中的指令及数据用于实现一种多层图像分割及目标轮廓缺陷检测方法。
39、本发明提供的技术方案带来的有益效果是:目标轮廓缺陷检测在工业生产中用途十分广泛,能有效提高检测效率,节约人工检测成本。该效果具体分析如下:
40、(1)本发明提出了一种多层图像分割及目标轮廓缺陷检测方法,输入待检测的目标图像,对其进行预处理,所述预处理包括:图像灰度化处理,二值化处理,取反处理和查找最小外接矩阵。如此,本发明可以基于采用了中值滤波器、漫水填充法等图像处理的方法来减小噪声对图像检测效果的影响。且,本发明还可以基于对完成预处理后的图像的分割处理,解决了沿着中线分割图像、沿着对角线分割图像以及沿着任意直线分割图像的问题。
41、(2)为了对比各个分块的相似度,本发明提出了一种用统计像素点大于阈值的像素点的个数从而来近似代替每个分块中目标轮廓的面积的方法,对分割后的图像计算各个分块的面积,并计算面积的极差;将极差与阈值进行对比,判断极差是否大于阈值,若否,则目标图像轮廓为正常状态;因此,在目标轮廓的分块足够小时,若两个分块的面积较为相近,则能够说明分块的相速度较高,因此能够通过计算面积来近似推断整个目标轮廓的状况,有效提升了运算速度。
42、(3)本发明分多阶段完成对目标轮廓的分割和检测,首先通过将目标轮廓分成四块,之后将目标轮廓分成八块,完成八块的检测,判断是否满足条件,如果满足条件,即极差小于阈值,则不再继续分割,若不满足,即极差大于阈值,判断目标图像轮廓是否分割完全,若是,则目标图像轮廓为异常状态,若否,则再次进行分割处理。再次分割,将目标轮廓分割为十六份。相较于传统的分割为固定份数的情况,本发明能够在不增加很多时间的情况下提供更高的准确率,能做出更准确的判断;而相较于传统的方案,本发明对于八份就能判断的情况不再细分,在不影响准确率的前提下节省了时间,更满足实际工业生产的需求。
- 还没有人留言评论。精彩留言会获得点赞!