3D显示设备的目标定位方法、装置、设备和存储介质与流程
本技术涉及显示,尤其涉及一种3d显示设备的目标定位方法、装置、设备和存储介质。
背景技术:
1、在裸眼3d显示过程中,为了保证用户的观看位置发生变化后,依然能够观看到连续无跳变的正确的3d显示效果,3d显示设备需要实时追踪和定位人眼位置,根据人眼位置实时地调整显示输出,从而给用户提供俱佳的观看体验。
2、在相关技术中,3d显示设备上用于人脸跟踪的立体相机在采集得到两幅图像后,需要对立体相机进行立体校正和立体匹配,立体校正的过程需要对两幅图像的每一像素坐标进行校正映射,以得到校正后的两幅图像的每一像素校正坐标,而立体匹配需要对两幅图像的每一校正像素坐标进行匹配,根据匹配结果计算每个校正像素坐标的视差,从而获得视差图,进而根据视差图转换成人眼或者人脸的空间坐标。然而,上述不管是立体校正还是立体匹配过程都需要对两幅图像中的每一像素进行处理,耗费大量时间,导致对人眼定位的实时性差。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本技术实施例通过提供一种3d显示设备的目标定位方法、3d显示装置、3d显示设备和计算机可读存储介质,旨在解决人眼定位的实时性差的技术问题。
2、为实现上述目的,本发明实施例提供一种3d显示设备的目标定位方法,所述3d显示设备的目标定位方法包括:
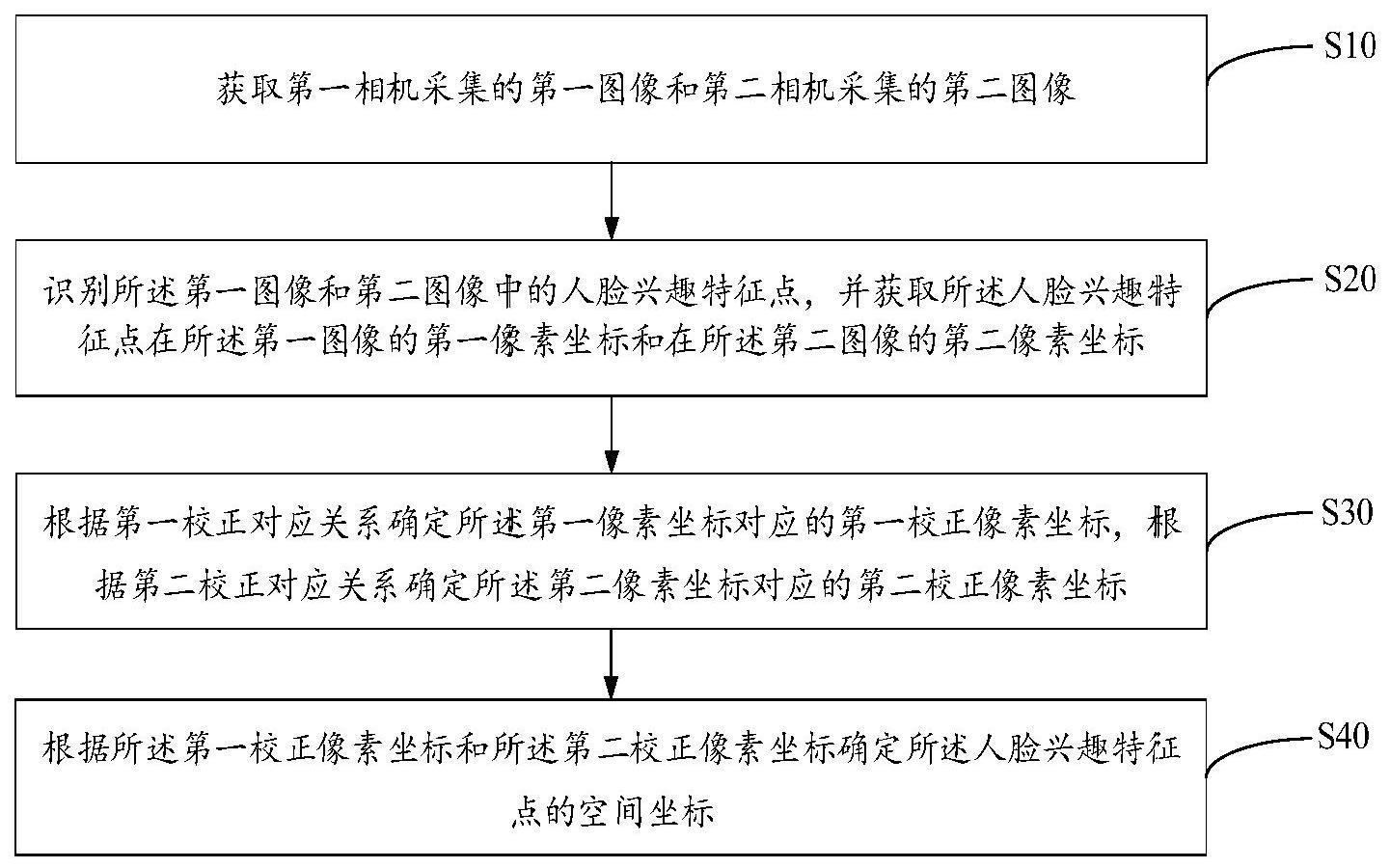
3、获取第一相机采集的第一图像和第二相机采集的第二图像;
4、识别所述第一图像和第二图像中的人脸兴趣特征点,并获取所述人脸兴趣特征点在所述第一图像的第一像素坐标和在所述第二图像的第二像素坐标;
5、根据第一校正对应关系确定所述第一像素坐标对应的第一校正像素坐标,根据第二校正对应关系确定所述第二像素坐标对应的第二校正像素坐标;
6、根据所述第一校正像素坐标和所述第二校正像素坐标确定所述人脸兴趣特征点的空间坐标。
7、可选地,所述根据所述第一校正像素坐标和所述第二校正像素坐标确定所述人脸兴趣特征点的空间坐标的步骤,包括:
8、获取所述第一相机和所述第二相机之间的重投影矩阵;
9、根据所述第一校正像素坐标和所述第二校正像素坐标确定所述人脸兴趣特征点在所述第一图像和所述第二图像之间的视差值;
10、根据所述视差值和所述重投影矩阵确定所述人脸兴趣特征点的空间坐标。
11、可选地,所述获取第一相机采集的第一图像和第二相机采集的第二图像的步骤之前,包括:
12、获取所述第一相机和第二相机分别在不同方位采集的标定板的标定板图像;
13、采用标定算法利用标定板图像分别对所述第一相机和第二相机进行标定,获得所述第一相机的内参矩阵和畸变映射向量、所述第二相机的内参矩阵和畸变映射向量以及所述第一相机和第二相机之间的旋转矩阵和平移矩阵;
14、根据所述第一相机和第二相机的内参矩阵和畸变映射向量以及所述第一相机和第二相机之间的旋转矩阵和平移向量对所述第一相机和第二相机进行立体校正,获得所述第一相机对应的所述第一校正对应关系和所述第二相机对应的所述第二校正对应关系。
15、可选地,所述根据所述第一相机和第二相机的内参矩阵和畸变映射向量以及所述第一相机和第二相机之间的旋转矩阵和平移向量对所述第一相机和第二相机进行立体校正,获得所述第一相机对应的第一校正对应关系和所述第二相机对应的第二校正对应关系的步骤,包括:
16、基于bouguet校正算法,根据所述第一相机和所述第二相机之间的旋转矩阵和平移矩阵,确定所述第一相机和所述第二相机共面行对准时的校正旋转矩阵以及所述第一相机和第二相机的投影矩阵和所述重投影矩阵;
17、根据所述校正旋转矩阵、所述投影矩阵以及所述第一相机的所述内参矩阵和畸变映射向量对对应的所述标定板图像每一像素的像素坐标进行校正,获得对应的第一校正像素坐标,根据所述校正旋转矩阵、所述投影矩阵以及所述第二相机的所述内参矩阵和畸变映射向量对对应的所述标定板图像每一像素的像素坐标进行校正,获得对应的第二校正像素坐标;
18、将第一相机采集的所述标定板图像每一所述像素坐标与对应的所述第一校正像素坐标关联保存,获得所述第一相机对应的所述第一校正对应关系,将第二相机采集的所述标定板图像每一所述像素坐标与对应的所述第二校正像素坐标关联保存,获得所述第二相机对应的所述第二校正对应关系。
19、可选地,所述根据所述第一校正像素坐标和所述第二校正像素坐标确定所述人脸兴趣特征点的空间坐标的步骤之后,包括:
20、根据所述空间坐标的分布情况确定三维视域;
21、基于三维算法,根据所述三维视域生成三维图像,并基于所述三维视域投射所述三维图像,以进行所述三维图像的显示。
22、所述根据所述人脸空间坐标的分布情况确定三维视域的步骤之后,包括:
23、获取所述三维视域的尺寸;
24、在所述尺寸小于预设尺寸时,将所述三维视域尺寸扩展至所述预设尺寸,并执行所述基于三维算法,根据所述三维视域生成三维图像,并基于所述三维视域投射所述三维图像,以进行所述三维图像显示的步骤。
25、可选地,所述获取所述三维视域的尺寸的步骤之后,还包括:
26、在所述尺寸大于所述预设尺寸时,将所述三维视域的尺寸缩小至所述预设尺寸,执行所述基于三维算法,根据所述三维视域生成三维图像,并基于所述三维视域投射所述三维图像,以进行所述三维图像显示的步骤。
27、此外,本发明为实现上述目的,本发明还提供一种3d显示装置,所述3d显示装置包括:
28、获取模块,用于获取第一相机采集的第一图像和第二相机采集的第二图像;
29、识别模块,用于识别所述第一图像和第二图像中的人脸兴趣特征点,并获取所述人脸兴趣特征点在所述第一图像的第一像素坐标和在所述第二图像的第二像素坐标;
30、校正模块,用于根据第一校正对应关系确定所述第一像素坐标对应的第一校正像素坐标,根据第二校正对应关系确定所述第二像素坐标对应的第二校正像素坐标;
31、定位模块,用于根据所述第一校正像素坐标和所述第二校正像素坐标确定所述人脸兴趣特征点的空间坐标。
32、此外,本发明为实现上述目的,本发明还提供一种3d显示设备,所述3d显示设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的3d显示设备的目标定位程序,所述3d显示设备的目标定位程序被所述处理器执行时实现如上所述的3d显示设备的目标定位方法的步骤。
33、此外,本发明为实现上述目的,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有3d显示设备的目标定位程序,所述3d显示设备的目标定位程序被处理器执行时实现如上所述的3d显示设备的目标定位方法的步骤。
34、本发明一实施例提出的一种3d显示设备的目标定位方法,3d显示装置、3d显示设备和计算机可读存储介质,通过获取第一相机采集的第一图像和第二相机采集的第二图像,然后识别第一图像和第二图像中的人脸兴趣特征点,并获取人脸兴趣特征点在第一图像的第一像素坐标和在第二图像的第二像素坐标,根据第一校正对应关系确定第一像素坐标对应的第一校正像素坐标,根据第二校正对应关系确定第二像素坐标对应的第二校正像素坐标,再根据第一校正像素坐标和第二校正像素坐标确定人脸兴趣特征点的空间坐标。通过预先选取人脸兴趣特征点,在采集图像后直接基于相机的校正对应关系便可确定人脸兴趣特征点在两幅图像中的校正像素坐标,实现人脸兴趣特征点的空间定位,而无需在定位过程对两幅图像中的每一像素进行实时校正映射和匹配来得到校正像素坐标,极大的提高了目标定位的实时性。
- 还没有人留言评论。精彩留言会获得点赞!