回环检测方法、电子设备及可读存储介质与流程
本技术涉及机器视觉,尤其涉及一种回环检测方法、电子设备及可读存储介质。
背景技术:
1、近年来,即时定位与地图构建(slam,simultaneous localization and mapping)技术被广泛研究,因为它允许在未知环境中即时创建地图和传感器的位姿估计,基于视觉的slam技术在这一领域发挥了重要作用。传统视觉slam基于静态环境的假设限制了其应用场景,例如仅限于动态元素较少的低动态场景。在高动态场景下,动态物体占图像面积较大时,视觉slam提取的特征点可能大量分布在动态物体上,导致其精度显著降低,估计的轨迹将不可以再使用,故视觉slam系统在高动态环境中普遍存在鲁棒性较差的问题。
2、上述内容仅用于辅助理解本技术的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本技术的主要目的在于提供一种回环检测方法、电子设备及可读存储介质,旨在解决目前视觉slam系统在高动态环境中普遍存在鲁棒性较差的问题。
2、为实现上述目的,一种回环检测方法,所述回环检测方法包括以下步骤:
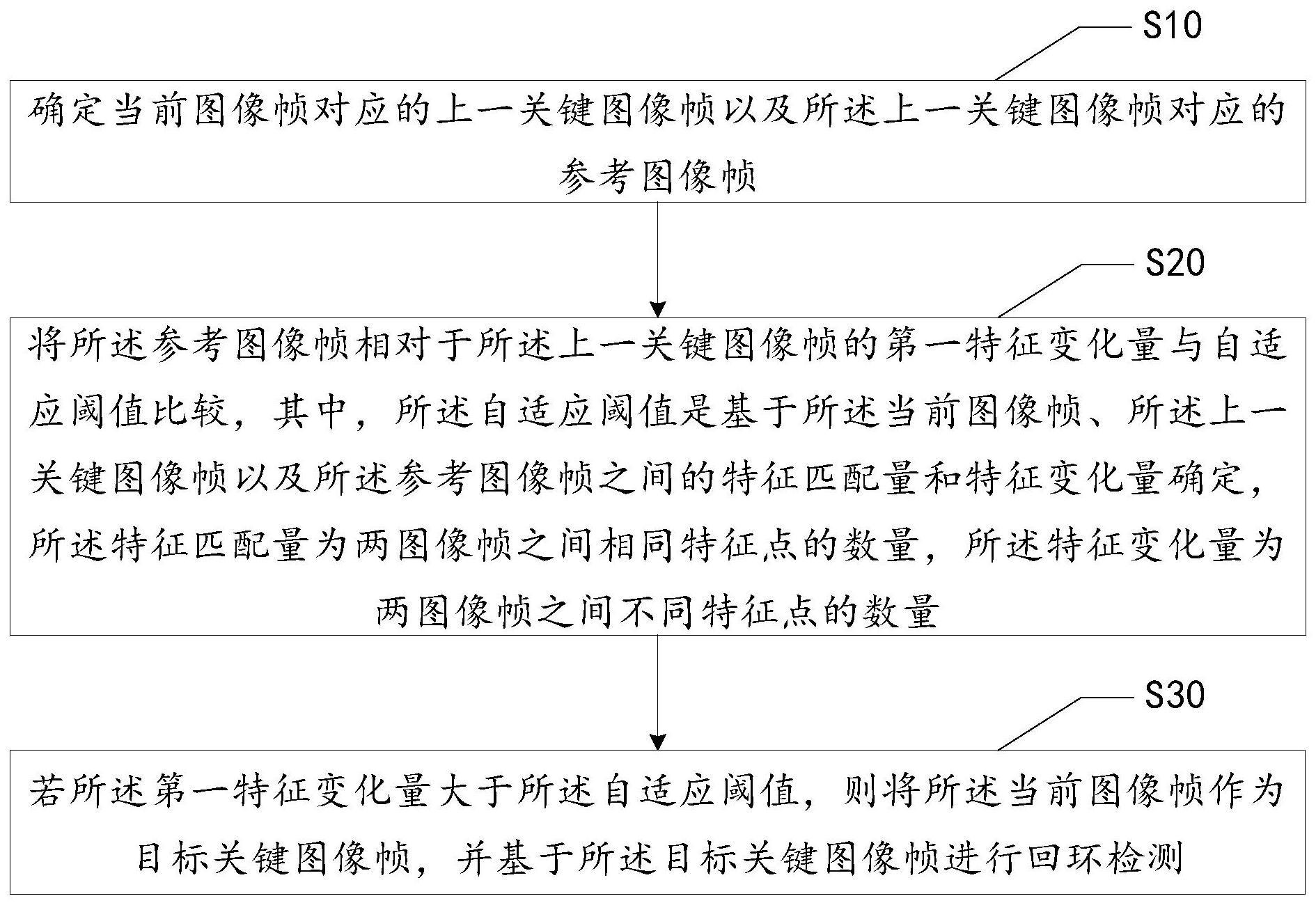
3、确定当前图像帧对应的上一关键图像帧以及所述上一关键图像帧对应的参考图像帧;
4、将所述参考图像帧相对于所述上一关键图像帧的第一特征变化量与自适应阈值比较,其中,所述自适应阈值是基于所述当前图像帧、所述上一关键图像帧以及所述参考图像帧之间的特征匹配量和特征变化量确定,所述特征匹配量为两图像帧之间相同特征点的数量,所述特征变化量为两图像帧之间不同特征点的数量;
5、若所述第一特征变化量大于所述自适应阈值,则将所述当前图像帧作为目标关键图像帧,并基于所述目标关键图像帧进行回环检测。
6、可选地,在所述将所述参考图像帧相对于所述上一关键图像帧的第一特征变化量与自适应阈值比较的步骤之前,所述方法包括:
7、确定所述当前图像帧与所述上一关键图像帧之间的第一特征匹配量;
8、确定所述参考图像帧与所述上一关键图像帧之间的第二特征匹配量;
9、检测所述当前图像帧中全部特征点的数量,得到第一全特征量;
10、检测所述参考图像帧中全部特征点的数量,得到第二全特征量;
11、基于所述第一特征匹配量、所述第二特征匹配量、所述第一全特征量、所述第二全特征量和所述第一特征变化量构建基本自适应阈值,基于所述基本自适应阈值确定自适应阈值。
12、可选地,所述基于所述基本自适应阈值确定自适应阈值的步骤包括:
13、确定所述第二特征匹配量与所述第一特征匹配量之间的第一差异量,依据所述第一差异量和所述第二特征匹配量之间的第一比例值构建第一修正系数;
14、依据所述当前图像帧和所述上一关键图像帧之间对应的图像帧数量构建第二修正系数;
15、确定所述第一特征变化量与所述第一特征匹配量之间的第二比例值,确定所述当前图像帧相对于所述上一关键图像帧的第二特征变化量与所述第二特征匹配量之间的第三比例值,依据所述第二比例值与第三比例值之间的第二差异量构建第三修正系数;
16、依据所述第一特征匹配量与所述第一特征变化量之间的第三比例值构建第四修正系数;
17、确定所述第二特征匹配量与所述第一特征匹配量之间的第三差异量,确定所述第二特征匹配量和第一特征匹配量的总量,依据所述第三差异量与所述总量之间的第四比例值构建第五修正系数;
18、基于所述第一修正系数、所述第二修正系数、所述第三修正系数、所述第四修正系数和所述第五修正系数对所述基本自适应阈值修正得到修正自适应阈值;
19、将所述修正自适应阈值作为所述自适应阈值。
20、可选地,所述基于所述第一修正系数、所述第二修正系数、所述第三修正系数、所述第四修正系数和所述第五修正系数对所述基本自适应阈值修正得到修正自适应阈值的步骤包括:
21、在所述第一修正系数小于或等于预设第一系数阈值的情况下,依据所述基本自适应阈值和预设常数参数构建修正自适应阈值;
22、在所述第一修正系数大于所述预设第一系数阈值的情况下,根据所述第一修正系数、所述第二修正系数、所述第三修正系数、所述第四修正系数以及所述第五修正系数生成总修正系数,依据所述总修正系数对所述基本自适应阈值进行修正得到所述修正自适应阈值。
23、可选地,在所述将所述当前图像帧作为目标关键图像帧的步骤之前,所述方法包括:
24、基于所述当前图像帧中的预设第一像素点和预设第二像素点之间的位置信息确定所述当前图像帧中的特征分布均匀度,其中,所述预设第一像素点的像素值与预设第二像素点的像素值在像素值序列中的位置关系是相邻,所述像素值序列是依据所述当前图像帧中各像素点按像素值大小进行排列得到,所述位置信息包括预设第一像素点对应的像素位置与所述预设第二像素点对应的像素位置之间的位置对应关系;
25、在所述特征分布均匀度大于自适应分布阈值时,执行所述将所述当前图像帧作为目标关键图像帧的步骤,其中,所述自适应分布阈值基于所述当前图像帧中各像素值以及各所述像素值的位置分布确定。
26、可选地,所述基于所述目标关键图像帧进行回环检测的步骤包括:
27、基于所述目标关键图像帧以及历史关键图像帧组成全关键图像帧序列,其中,所述历史关键图像帧为确定所述目标关键图像帧之前所述确定的关键图像帧;
28、基于所述全关键图像帧序列中各相邻关键图像帧之间的视角变化度,确定不同局部关键图像帧序列;
29、计算各所述局部关键图像帧序列之间的相似度;
30、将相似度大于预设相似度阈值的两局部关键图像帧序列确定为形成回环的目标关键图像帧序列。
31、可选地,所述视角变化度包括第一视角变化度和第二视角变化度;
32、所述基于所述全关键图像帧序列中各相邻关键图像帧之间的视角变化度,确定不同局部关键图像帧序列的步骤包括:
33、确定基准关键图像帧与位于所述基准关键图像帧之前的前关键图像帧之间的第一视角变化度,其中,所述基准关键图像帧为所述全关键图像帧序列中除首端关键图像帧和末端关键图像帧以外的任意一关键图像帧;
34、确定所述基准关键图像帧与位于所述基准关键图像帧之后的后关键图像帧之间的第二视角变化度;
35、若所述第一视角变化度小于预设视角变化阈值且所述第二视角变化度大于所述预设视角变化阈值,则将所述基准关键图像帧作为划分帧;
36、依据所述划分帧对所述全关键图像帧序列进行划分得到各所述局部关键图像帧序列。
37、可选地,在所述确定当前图像帧对应的上一关键图像帧以及所述上一关键图像帧对应的参考图像帧的步骤之前,所述方法包括:
38、基于预设目标检测模型检测当前获取到的图像中的各目标对象;
39、基于先验信息确定各所述目标对象中的动态对象,其中,所述先验信息中包括被标记为动态的目标对象,标记为动态的目标对象为所述动态对象;
40、将所述图像中所述动态对象上的动态特征删除得到所述当前图像帧。
41、此外,为实现上述目的,本技术还提供一种电子设备,所述电子设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的回环检测程序,所述回环检测程序被所述处理器执行时实现如上述的回环检测方法的步骤。
42、此外,为实现上述目的,本技术还一种可读储存介质,所述可读存储介质上存储有回环检测程序,所述回环检测程序被处理器执行时实现如上述的回环检测方法的步骤。
43、本技术实施例提出一种回环检测方法、电子设备及可读存储介质。在本实施例中,将基于当前图像帧确定上一关键图像帧以及上一关键图像帧的参考图像帧,再将参考图像帧相对于上一关键图像帧的第一特征变化量与自适应阈值比较,自适应阈值将结合当前图像帧、上一关键图像帧以及参考图像帧之间的特征匹配量和特征变化量确定,其中,特征匹配量为两图像帧之间相同特征点的数量,特征变化量为两图像帧之间不同特征点的数量,使得自适应阈值可用于衡量当前图像帧中特征点分布均匀度,当当前图像帧均有较好的均匀度时,则表示该当前图像帧具有较少或没有动态特征,以减少动态特征对回环检测结果的影响,提高了关键帧的质量,再基于通过上述方式确定的关键图像帧进行回环检测,保证高动态场景下视觉slam系统的鲁棒性。此外,还需要说明的是,通过上述自适应阈值对关键图像帧进行筛选,除可以保证关键图像帧的质量外,还可以精简关键图像帧的数量,加快回环检测的效率,提高了回环检测实时性。
- 还没有人留言评论。精彩留言会获得点赞!