全景环带镜头的杂散光评价方法及系统与流程
本发明涉及光学镜头,具体涉及一种全景环带镜头的杂散光评价方法及系统。
背景技术:
1、随着计算机辅助光学设计和各种特殊光学加工技术的发展,众多非传统结构、非传统功能与性能的光学系统正涌现。全景环带光学系统是一种基于折反射光学系统原理的超大视场光学系统,由于其特殊的光路结构设计,相比已有的超大视场系统具有更轻巧稳固的结构,更高的设计自由度,更简单的加工工艺和更好的光学性能。随着各类光学系统的结构复杂化,杂散光对光学系统的制约将不可忽视。杂散光是指在光学系统内不沿正常成像光路传播的光线,将会在光学系统像面上产生额外的,凌乱的照明,影响光学系统的正常工作。
2、传统的常规控制手段对于只在某些特定类型的特殊光学系统上出现的杂散光是无效的。且目前各种杂散光都缺少快速、准确的评估方法,不便于快速迭代光学设计方案。近年来针对各种特殊光学系统的杂散光控制一般都在光学设计完成后进行大量分析工作,寻找可能的位置将杂散光路遮拦。这种方法工作量大,不便快速迭代,且不具有通用性。
3、针对全景环带光学系统,人们也进行了一些在设计阶段快速控制杂散光的尝试,但方法本身并不准确可靠,结果也无法预测,不利于快速低成本迭代出光学性能优异的全景环带光学系统。
4、目前光学系统杂散光的分析一般在光学设计阶段性完成后,另外建立光机系统模型,基于大量的光线追迹来判断当前系统的杂散光情况。这种方法与光学设计过程是分立的,彼此无法进行有效沟通。需要人工来回控制,效率低,结果可控程度低,导致特殊光学系统的研发周期一般都较长。
5、较为成熟的传统杂散光抑制方法有设计遮光罩结构、提高光学镀膜的光学性能、在系统内部安置消杂光光阑、在结构件上车消光螺纹或布置消光涂层等。这些方法在传统的纯折射、中小视场角的镜头中能够起到一定作用,降低杂散光对光学系统的影响。然而对于具有特殊结构的全景环带光学系统而言,这些方法将无法控制形成于其全景头部单元内的杂散光,且这些杂散光都对光学系统的成像有着严重的破坏。目前这些杂散光缺乏有效、准确的即时评估与抑制方法。
6、现有技术中,本领域技术人员始终尝试在光学设计阶段通过对成像光线数学关系的管理实现消杂光设计,然而杂散光与成像光路在绝大多数情况下并不共享传播路径,因此试图利用成像光路来描述杂散光是不准确、不可靠的。且全景环带光学系统的杂散光构成非常复杂,而该方法的针对性太强,并不广泛适用于此类系统。
7、在一些技术文献中,也给出了一些在全景环带光学系统加工完成后,通过挖洞、开槽等方式截断杂散光传播路径,但此类消杂光手段属于光学系统已加工完成后进行的补救措施,效果非常有限,且不一定能落实。因此,目前还没有针对全景环带光学系统杂散光较为系统、全面、有效的分析和解决方案。
技术实现思路
1、鉴于上述技术问题,本发明的目的为提供一种全景环带镜头的杂散光评价方法及系统,系统、全面、有效的分析杂散光,实现在验收阶段仅基于光学设计数据直接形成对杂散光的评价,或在设计阶段抑制杂散光。
2、实现本发明目的的技术解决方案为:一种全景环带镜头的杂散光评价方法,包括以下步骤:
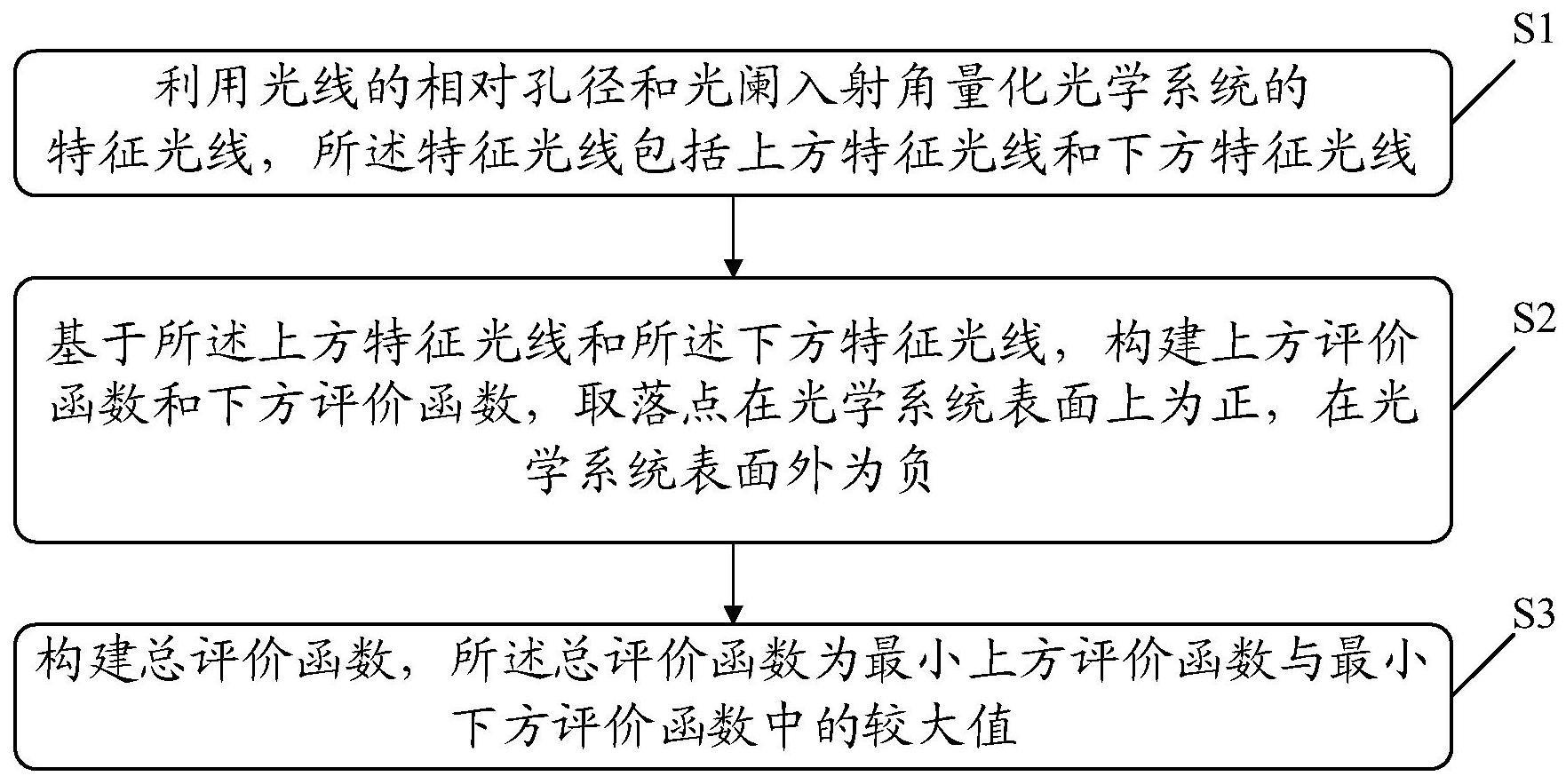
3、步骤s1、利用光线的相对孔径和光阑入射角量化光学系统的特征光线,所述特征光线包括上方特征光线和下方特征光线;
4、步骤s2、基于所述上方特征光线和所述下方特征光线,构建上方评价函数和下方评价函数,取落点在光学系统表面上为正,在光学系统表面外为负;
5、步骤s3、构建总评价函数,所述总评价函数为最小上方评价函数与最小下方评价函数中的较大值,表示为:
6、c=max(min(curn),min(clrm))
7、其中,c为总评价函数,clrm为第m个下方评价函数,curn为第n个上方评价函数。
8、根据本发明的一个方面,还包括:
9、步骤s4、根据总评价函数c的计算数值,判断光学系统是否存在对应类型的杂散光;
10、其中,所述总评价函数c小于或等于0,则该光学系统不存在该类杂散光;反之,则存在。
11、根据本发明的一个方面,所述上方特征光线通过上方光线路径点得到,所述上方光线路径点为光路图中在光路经过的、且最大光阑视场角的光线的落点最靠近边缘的每个表面上,距离最大光阑视场角的光线最近的镜片边缘点;
12、所述下方特征光线通过下方光线路径点得到,所述下方光线路径点为光路图中在光路经过的、且最小光阑视场角的光线的落点最靠近边缘的每个表面上,距离最小光阑视场角的光线最近的镜片边缘点。
13、根据本发明的一个方面,在所述步骤s1中,利用试探光线在经过全景环带光学系统头部结构任一包含某个特征光线路径点的光学表面时的落点与对应的特征光线路径点的垂轴距离来识别该试探光线是否为一特征光线,
14、即利用试探光线迭代寻找特征光线,试探光线落点与各路径点在所在表面上的垂轴距离记为:
15、
16、其中,iurw为评价试探光线是否可认为是上方光线的指标,ilrw为评价试探光线是否可认为是下方光线的指标,yurw为上方光线路径点的垂直轴坐标,ylrw为下方光线路径点的垂轴坐标,y试探光线,urw所在表面为试探光线在对应的上方光线路径点所在光学表面的落点的垂轴坐标,y试探光线,lrw所在表面为试探光线在对应的下方光线路径点所在光学表面的落点的垂轴坐标;
17、上式中,根据具体杂散光类型和路径点的选定,定义iurw和ilrw的符号为:若试探光线落在表面有效孔径内为正,落在有效孔径外为负;
18、在iurw=0时,该试探光线为上方光线,并对应一个光阑入射角在ilrw=0时,该试探光线为下方光线,并对应一个光阑入射角
19、确定有效上方光线和有效下方光线,有效上方光线和有效下方光线的光阑视场角满足:
20、
21、其中,θur为有效上方光线的光阑视场,θlr为有效下方光线的光阑视场角,为使得试探光线经过第m个上方光线路径点的光阑视场角,为使得试探光线经过第n个下方光线路径点的光阑视场角。
22、根据本发明的一个方面,在所述步骤s2中,具体包括:
23、步骤s21、构建上方评价函数cur,上方评价函数为上方光线在每个下方光线路径点所在表面上的落点,与下方光线路径点的垂轴距离,公式为:
24、|curn|=|yur,lrwn所在表面-ylrwn|,
25、其中,curn为基于第n个下方光线路径点的上方评价函数,yur,lrwn所在表面为有效上方光线在第n个下方光线路径点所在表面上的落点的垂轴坐标,ylrwn为第n个下方光线路径点的垂轴坐标;根据具体杂散光类型和路径点的选定,定义curn的符号为:若上方光线落在表面有效孔径内为正,落在有效孔径外为负;
26、步骤s22、构建下方评价函数clr,下方评价函数为下方光线在每个上方光线路径点所在表面上的落点,与上方光线路径点的垂轴距离,公式为:
27、|clrm|=|ylr,urwm所在表面-yubwm|,
28、其中,clrm为基于第m个上方光线路径点的下方评价函数,ylr,urwm所在表面为有效下方光线在第m个上方光线路径点所在表面上的落点的垂轴坐标,yurwm为第m个上方光线路径点的垂轴坐标;根据具体杂散光类型和路径点的选定,定义clrm的符号为:若下方光线落在表面有效孔径内为正,落在有效孔径外为负。
29、根据本发明的一个方面,提出了一种全景环带镜头的杂散光评价系统,利用如上述技术方案中任一项所述的全景环带镜头的杂散光评价方法判断光学系统是否存在杂散光的评价系统。
30、根据本发明的构思,提出一种全景环带镜头的杂散光评价方法及系统,通过光线的相对孔径和光阑入射角量化光学系统的特征光线,以特征光线构建杂散光评价函数,作为评估一类杂散光严重程度的量化指标,综合考虑了上方、下方特征光线的位置,快速准确的评估当前光学系统的杂散光情况与风险,有利于在验收阶段迅速判断光学系统杂散光是否满足要求,同时,也能够在光学系统的设计阶段消除杂散光,避免了大量基于光机系统建模和大批量光线追迹的杂散光分析工作,提升光学系统设计效率,大大缩短光学系统的研发周期,减少研发成本。
31、进一步地,形成的量化指标对于评估杂散光具有明确的物理意义,可根据软件输出的评价函数值准确评估系统受到杂散光影响的风险,以及评估加工过程中的误差导致杂散光的可能性,为高性能光学系统设计提供了可靠的参考。
- 还没有人留言评论。精彩留言会获得点赞!