一种用于弧光干扰下激光条纹的识别模型及识别方法
本发明公开涉及自动化焊接的,尤其涉及一种用于弧光干扰下激光条纹的识别模型及识别方法。
背景技术:
1、焊接是制造业中传统的、重要的加工工艺方法之一,广泛地应用于机械制造、航空航天、能源交通、石油化工、工程机械、船舶制造、高层建筑以及电子等行业。随着国民经济的发展,产品焊接质量、焊接效率的要求越来越高。普通的焊条电弧焊已经很难满足现代焊接制造的要求,特别是随着激光焊、激光电弧焊、搅拌摩擦焊、多丝电弧焊、窄间隙气体保护焊、窄间隙埋弧焊等新的高效焊接工艺方法在工程实际中的普遍应用,焊接自动化已经成为现代焊接制造的关键技术之一。
2、与依赖于“自然光”的被动视觉测量方法不同,以线结构光为代表的主动视觉测量技术能够“主动地”产生必要的特征信息,这样能解决在复杂环境中物体特征信息缺少的问题,因而在工业检测中得到了广泛应用。线结构光主动视觉测量主要基于光学三角法测量原理,由激光发生器和摄像机共同组成视觉系统,图像1为线结构光焊缝跟踪系统。激光发生器投射出的激光打在被测物体表面上而被调制成包含特定信息的激光条纹图像,再对激光条纹图像进行一系列处理以获得物体表面三维形貌信息。由于激光条纹在图像中所占的像素比例非常少,所以线结构光传感器中的激光条纹提取的准确性和精度是该测量方法的关键。激光条纹提取的干扰因素主要来源于光源、环境噪声和被测物体的形貌。而暗光环境下焊接所产生的弧光、飞溅、反光等在图像中与线结构光有非常相似的性状,大大提升了激光条纹提取的难度,导致仅用物理特征来识别激光条的经典提取方法难以适用。
3、经典的激光条纹提取算法如几何中心法、灰度重心法、形态学法、阈值法、steger法,这些方法通过对激光条纹的物理特征进行分析,基于其独特的特征表示进行区分来提取激光条纹区域,该类方法在简单的环境下有着优秀的识别能力。但是工业现场的焊接过程往往处于复杂的环境下,对激光条纹的提取有多种类型的干扰,导致经典方法难以准确提取激光条。近年,许多研究针对不同的噪声提出不同的改进方法,这些方法对于弱噪声下有更高的鲁棒性,但是对于强弧光干扰下的激光条纹仍然无法稳健识别,因此,如何解决弧光干扰下的激光条纹提取问题,成为人们亟待解决的问题。
技术实现思路
1、鉴于此,本发明提供了一种用于弧光干扰下激光条纹的识别模型及识别方法,以解决弧光干扰下的激光条纹提取问题。
2、一方面,本发明提供了一种用于弧光干扰下激光条纹的识别方法,所述方法包括如下步骤:
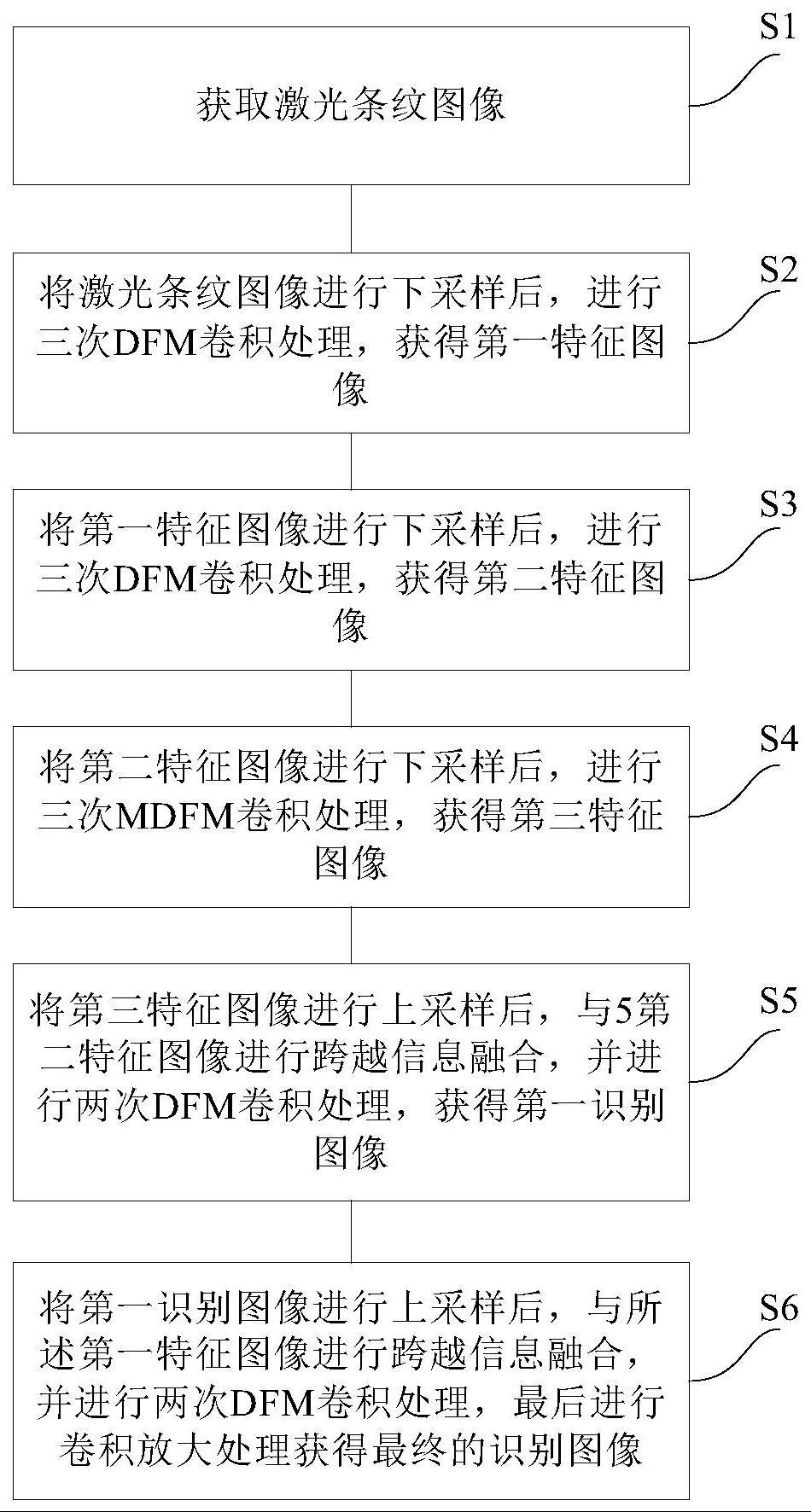
3、获取激光条纹图像;
4、将所述激光条纹图像进行下采样后,进行三次dfm卷积处理,获得第一特征图像;
5、将所述第一特征图像进行下采样后,进行三次dfm卷积处理,获得第二特征图像;
6、将所述第二特征图像进行下采样后,进行三次mdfm卷积处理,获得第三特征图像;
7、将所述第三特征图像进行上采样后,与所述第二特征图像进行跨越信息融合,并进行两次dfm卷积处理,获得第一识别图像;
8、将所述第一识别图像进行上采样后,与所述第一特征图像进行跨越信息融合,并进行两次dfm卷积处理,最后进行卷积放大处理获得最终的识别图像。
9、优选,所述dfm卷积处理具体为:
10、将输入图像依次进行3×3深度卷积处理、1×1点卷积处理、归一化处理后,由relu激活函数进行激活处理,获得第一滤波图像;
11、将所述第一滤波图像依次进行带有膨胀因子r的3×3深度卷积处理、1×1点卷积处理、归一化处理后,获得第二滤波图像;
12、将输入图像与所述第二滤波图像融合后,由relu激活函数进行激活处理,获得dfm卷积处理后图像。
13、进一步优选,所述mdfm卷积处理具体为:
14、将输入图像依次进行3×3深度卷积处理、1×1点卷积处理、归一化处理后,由relu激活函数进行激活处理,获得第三滤波图像;
15、将所述第三滤波图像依次进行3×3深度卷积处理、1×1点卷积处理、归一化处理后,获得第四滤波图像;
16、将所述第三滤波图像依次进行带有膨胀因子r1的3×3深度卷积处理、1×1点卷积处理、归一化处理后,获得第五滤波图像;
17、将所述第三滤波图像依次进行带有膨胀因子r2的3×3深度卷积处理、1×1点卷积处理、归一化处理后,获得第六滤波图像;
18、将输入图像与所述第四滤波图像、第五滤波图像以及第六滤波图像融合后,由relu激活函数进行激活处理,获得mdfm卷积处理后图像。
19、进一步优选,所述下采样采用步长为2的w2×2的卷积层进行处理,将图像宽和高缩放至1/2大小。
20、进一步优选,所述上采样采用反卷积层进行处理,将图像宽和高扩大。
21、进一步优选,所述跨越信息融合具体为:
22、由统一注意力融合模块生成比重因子α,随后将来自解码器中的特征fhigh与来自编码器中的特征flow分别与比重因子α和1-α相乘后,融合相加得到图像信息。
23、另一方面,本发明还提供了一种用于弧光干扰下激光条纹的识别模型,所述模型包括:编码器以及解码器;
24、所述编码器包括:串行设置的第一编码单元、第二编码单元以及第三编码单元所述第一编码单元包括:串行设置的下采样模块和三个dfm卷积模块,用于将输入的激光条纹图像进行特征提取与编码,获得第一特征图像;
25、所述第二编码单元包括:串行设置的下采样模块和三个dfm卷积模块,用于将所述第一编码单元输出的第一特征图像进行特征提取与编码,获得第二特征图像;
26、所述第三编码单元包括:串行设置的下采样模块和三个mdfm卷积模块,用于将所述第二编码单元输出的第二特征图像进行特征提取与编码,获得第三特征图像;
27、所述解码器包括:串行设置的第一解码单元以及第二解码单元;
28、所述第一解码单元包括:上采样模块、统一注意力融合模块、两个dfm卷积模块;
29、所述上采样模块与所述第三编码单元连接,用于进行所述第三编码单元输出的第三特征图像的上采样;
30、所述统一注意力融合模块分别与所述上采样模块和所述第二编码单元连接,用于将所述上采样模块的采样信息与所述第二编码单元输出的第二特征图像进行注意力融合;
31、两个所述dfm卷积模块串行后与所述统一注意力融合模块连接,用于将所述统一注意力融合模块输出的融合图像进行两次dfm卷积处理后,获得第一识别图像;
32、所述第二解码单元包括:上采样模块、统一注意力融合模块、两个dfm卷积模块;
33、所述上采样模块与所述第一解码单元连接,用于进行所述第一解码单元输出的第一识别图像的上采样;
34、所述统一注意力融合模块分别与所述上采样模块和所述第一编码单元连接,用于将所述上采样模块的采样信息与所述第一编码单元输出的第一特征图像进行注意力融合;
35、两个所述dfm卷积模块串行后与所述统一注意力融合模块连接,用于将所述统一注意力融合模块输出的融合图像进行两次dfm卷积处理后,最后进行卷积放大处理获得最终的识别图像。
36、进一步优选,所述dfm卷积模块为残差结构,包括:w3×3滤波器m1、w3×3滤波器m2、融合层以及relu激活层;
37、所述w3×3滤波器m1包括:依次串行设置的3×3深度卷积层、1×1点卷积层、归一化层以及relu激活层,用于快速筛选信息;
38、所述w3×3滤波器m2与所述w3×3滤波器m1串行设置,包括:依次串行设置的带有膨胀因子的3×3深度卷积层、1×1点卷积层以及归一化层,用于捕捉更大接受域的上下文信息;
39、所述融合层用于将输入图像与w3×3滤波器m2的输出图像融合;
40、所述relu激活层用于将融合后图像进行激活处理。
41、进一步优选,所述mdfm卷积模块包括:w3×3滤波器m1、多尺度特征提取器、融合层以及relu激活层;
42、所述w3×3滤波器m1包括:依次串行设置的3×3深度卷积层、1×1点卷积层、归一化层以及relu激活层;
43、所述多尺度特征提取器与所述w3×3滤波器m1串行设置,包括:并行设置的多个w3×3滤波器m2;
44、每个所述w3×3滤波器m2均包括:依次串行设置的3×3深度卷积层、1×1点卷积层以及归一化层,其中,各个所述3×3深度卷积层的膨胀因子不同;
45、所述融合层用于将输入图像与各个w3×3滤波器m2输出的图像融合;
46、所述relu激活层用于将融合后图像进行激活处理。
47、进一步优选,所述识别模型的损失函数为:
48、loss=lossce+lossdice
49、其中,分别为第n个像素点预测为第i类和第c类,wc为类别c的权重系数,yi为第i个像素点的预测值,gi为第i个像素点的真实值,ε为平滑系数。
50、本发明提供的用于弧光干扰下激光条纹的识别模型及识别方法,提出一种基于深度学习的语义分割算法,从激光条纹图像中挖掘更深层次的语义特征,构建端到端的激光条纹分割网络,设计了全新的语义分割识别模型,可以高效、实时地提取激光条纹区域。
51、本发明提供的用于弧光干扰下激光条纹的识别模型及识别方法,具有更高的准度度,且在激光条纹边缘具有更符合真实图像的分割结果,在复杂环境下具有更高的鲁棒性,且对烟尘、飞溅等其他干扰也具有一定的抵抗性,提升了分割速度,能够实时识别激光条。
52、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明的公开。
- 还没有人留言评论。精彩留言会获得点赞!