一种基于博弈进化算法的柔性作业车间调度方法、装置、电子设备及介质
本发明涉及生产调度,具体涉及一种基于博弈进化算法的柔性作业车间调度方法、装置、电子设备及介质。
背景技术:
1、在现代制造业中应用广泛的柔性作业车间调度问题(flexible job-shopscheduling problem,fjsp)是经典作业车间调度问题(job-shop scheduling problem,jsp)的扩展;与jsp相比,fjsp更好的反映了当代生产实际需求,尤其体现在每一道工序可以在多台可选和不同设备上加工。传统柔性作业车间调度问题fjsp涉多种工件和多台设备,每一种工件的加工都需要经过一系列具有严格顺序的工序,每一道工序都可由一台或多台设备进行加工;因此,传统柔性作业车间调度问题fjsp涉及两个子问题:设备分配问题和工序排序;其中:设备分配问题为每一道工序分配一台加工设备;工序排序问题调度所有设备上的工序以获得更加柔性和高质量的调度解,从而达到工件最大完工时间cmax的最小化,此处最小化cmax目标的内涵与最大化设备等资源利用率一致。
2、针对柔性作业车间调度问题,国内外的研究学者已经开展了大量的研究;研究者们对于柔性作业车间调度问题的研究趋势为:针对问题特点,通过对以进化算法为代表的元启发式算法作出改进,实现更加复杂的、更接近生产实际的fjsp问题求解。但是,传统的进化算法设计之初是面向一种通用组合优化问题的求解,所提出的基于父代随机选取而衍生出的种群随机性机制,更多的是从通用或共性的角度形成算法体系;这种随机选择交叉配偶的方式必然增加了进化方式的随机性,在带来盲目性的同时,也容易陷入早熟而不利于获得全局优化结果,这也是进化算法在理论研究和实际应用中存在的突出问题。
3、随着人们对柔性作业车间调度问题研究的不断深入,以及将调度问题的研究成果应用到实际生产中的需求日益迫切,与生产实际贴近更加紧密的更大规模、具有更复杂约束的调度问题已经成为研究的焦点;而进化算法由于其盲目搜索特性,已经难以应对此类大规模复杂调度问题。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种基于博弈进化算法的柔性作业车间调度方法、装置、电子设备及介质,能够通快速有效的生成合理的调度方案,大大提高生产效率。
2、为达到上述目的,本发明是采用下述技术方案实现的:
3、第一方面,本发明提供了一种基于博弈进化算法的柔性作业车间调度方法,所述方法包括:
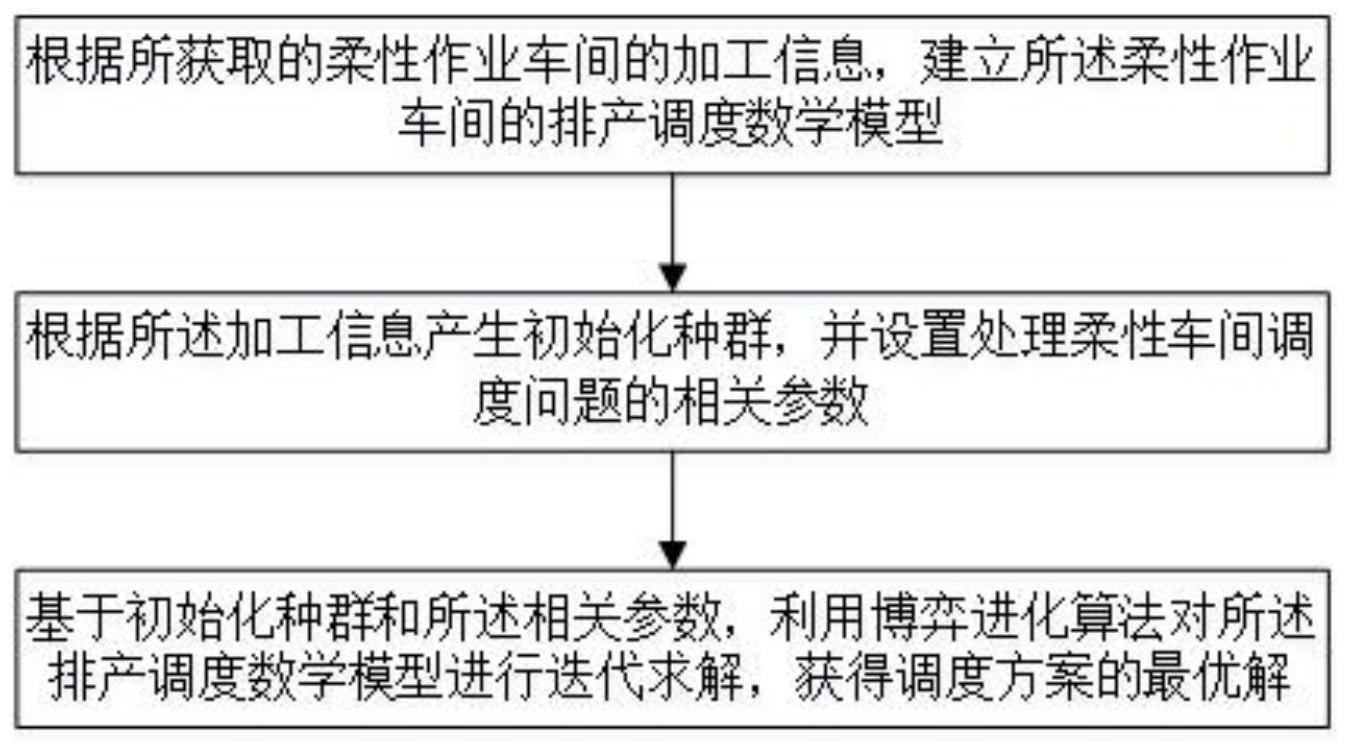
4、根据所获取的柔性作业车间的加工信息,建立所述柔性作业车间的排产调度数学模型;
5、根据所述加工信息产生初始化种群,并设置处理柔性车间调度问题的相关参数;
6、基于初始化种群和所述相关参数,利用博弈进化算法对所述排产调度数学模型进行迭代求解,获得调度方案的最优解。
7、结合第一方面,优选的,所述加工信息包括工件数量、各工件的工序数量、各工序的加工时间和加工设备数量。
8、结合第一方面,优选的,所述相关参数包括初始种群大小、最大迭代次数和变异概率。
9、结合第一方面,优选的,建立所述柔性作业车间的排产调度数学模型包括:
10、以最小化所有工序的最大完成时间cmax为目标,建立柔性作业车间调度问题的目标模型:
11、
12、式中,eij表示工件i的第j道工序的完工时间,n表示工件的数量,gi表示工件i的工序数量;
13、通过公式(2)至公式(5)建立柔性作业车间调度问题的资源约束模型:
14、
15、
16、
17、sij+(1-bi′j′p-ijp)·l≥si′j′+ati′j′ (5)
18、其中,公式(2)表示对于任意一道工序,都必须有至少一台可加工设备,公式(3)表示任意一道工序的加工设备仅有一台,公式(4)表示任意一道工序的加工设备来自其可选加工设备集合;公式(5)表示每一台设备在同一时刻最多只能加工一道工序;xijp、uijp和bi′j′p-ijp均是值为0或1的参数;xijp表示工件i的第j道工序能否在设备p上加工,能则值为1,否则为0;uijp表示工件i的第j道工序最终是否在设备p上加工,是则值为1,否则为0;bi′j′p-ijp表示工件i的第j道工序是否紧接着工件i’的第j’道工序在设备p上加工,是则值为1,否则为0;p∈(1,2,...m),l为常数;
19、通过公式(6)和公式(7)建立柔性作业车间调度问题的工艺约束模型:
20、
21、
22、其中,公式(6)表示工序的加工开始时间、加工结束时间和加工工时的数量关系;公式(7)表示工件加工的工艺路线约束,即任意一道工序都需要在其工艺路线约束下的前一道工序完工后,才可以开始加工;sij、eij和tij分别表示工件i的第j道工序的加工开始时刻、加工结束时刻和加工时长;si(j+1)表示工件i的第(j+1)道工序的加工开始时刻。
23、结合第一方面,优选的,所述利用博弈进化算法对所述排产调度数学模型进行迭代求解的步骤包括:
24、将用于第k次迭代的种群dk划分为优劣程度分布相当的决策方和应对方;
25、根据第k-1次迭代更新的博弈策略对所述决策方和应对方进行基于博弈论的交叉操作生成子代;
26、基于交叉操作生成的子代,通过随机交换一个染色体内的两道工序及其相应加工设备的位置进行变异操作;
27、将经过交叉变异后的个体组成新的子代种群qk,合并上一代父代种群dk与新一代种群qk生成新的新的父代种群rk=dk∪qk;
28、按照适应度值从大到小的顺序对新的父代种群rk的个体进行排序,从排序的队列中选出前n个个体组成新一代种群dk+1;
29、判断迭代次数k是否达到最大迭代次数,若没达到,则令k=k+1,重复执行上述步骤,直至当前迭代次数达到最大迭代次数时停止,在此时得到的种群dk+1中选出最优的一个解即为调度方案的最优解。
30、结合第一方面,优选的,所述博弈策略用于在决策方产生一个待配对个体时,应对方根据当前各个体的选择概率对配对个体的对应选择;所述选择概率具体包括:
31、将决策方均分为优等个体ds、中等个体dm和劣等个体di三类,将与应对方的个体均分为优等个体as、中等个体am和劣等个体ai三类,并且九种配对类型的选择概率分别满足:
32、p(as|ds)+p(am|ds)+p(ai|ds)=1
33、p(as|dm)+p(am|dm)+p(ai|dm)=1
34、p(as|di)+p(am|di)+p(ai|di)=1
35、式中,p(as|ds)表示当决策方选择优等个体ds时,应对方选择优等个体as的概率;p(am|ds)表示当决策方选择优等个体ds时,应对方选择中等个体am的概率;p(ai|ds)表示当决策方选择优等个体ds时,应对方选择劣等个体ai的概率;p(as|dm)表示当决策方选择中等个体dm时,应对方选择优等个体as的概率;p(am|dm)表示当决策方选择中等个体dm时,应对方选择中等个体am的概率;p(ai|dm)表示当决策方选择中等个体dm时,应对方选择劣等个体ai的概率;p(as|di)表示当决策方选择劣等个体di时,应对方选择优等个体as的概率;p(am|di)表示当决策方选择劣等个体di时,应对方选择中等个体am的概率;p(ai|di)表示当决策方选择劣等个体di时,应对方选择劣等个体ai的概率;
36、所述九种配对类型的选择概率的初始值均设置为1/3,进过多次迭代更新后逐步进化达到选择概率的收敛。
37、结合第一方面,优选的,所述博弈策略的更新步骤包括:
38、根据当前次迭代交叉操作产生的子代,分别统计九种配对类型的匹配数量;
39、分别从九种配对类型的匹配数量中统计出其对应的期待配对的数量;其中,两个染色体交叉后产生的子代中,至少有一个比其父母都要优秀,则称本次交叉的配对为期待配对;
40、基于各匹配类型的匹配数量和期待配对,结合当前次迭代的选择概率,利用贝叶斯公式分别计算更新九种匹配类型在下一次迭代时的选择概率。
41、第二方面,本发明提供了一种基于博弈进化算法的柔性作业车间调度装置,所述装置包括:
42、建立模块,用于根据所获取的柔性作业车间的加工信息,建立所述柔性作业车间的排产调度数学模型;
43、初始化模块,用于根据所述加工信息产生初始化种群,并设置处理柔性车间调度问题的相关参数;
44、迭代求解模块,用于基于初始化种群和所述相关参数,利用博弈进化算法对所述排产调度数学模型进行迭代求解,获得调度方案的最优解。
45、第三方面,本发明提供了一种电子设备,包括处理器及存储介质;
46、所述存储介质用于存储指令;
47、所述处理器用于根据所述指令进行操作以执行如第一方面任一所述的基于博弈进化算法的柔性作业车间调度方法的步骤。
48、第四方面,本发明提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时,实现如第一方面任一所述的基于博弈进化算法的柔性作业车间调度方法的步骤。
49、与现有技术相比,本发明所达到的有益效果:
50、本发明在充分利用进化算法整体优势的基础上,设计的博弈进化算法对种群迭代的方向性控制机制进行了探索,提高了算法的寻优效果,在面对大规模复杂调度问题时,具有自适应性强、实时性高、计算速度快且可靠性高的特点,能够快速有效的获得较优的调度方案,实现资源的优化配置,大大提高产线的生产效率,节约生产成本。
- 还没有人留言评论。精彩留言会获得点赞!