一种图像校正方法、系统、计算机设备及存储介质与流程
本技术属于车牌识别领域,尤其涉及一种图像校正方法、系统、计算机设备及存储介质。
背景技术:
1、路边停车中,通常采用摄像头针对停车位上的车辆进行实时监控,而获取停车位图像,进而实现停车收费。由于实时监控的摄像头耗电量大,因此需要采用市电作为供电电源。在路边采用市电供电的摄像头方式不但耗电量大而且破坏现有路面结构。因此耗电量小且不会对现有路面结构造成影响的太阳能供电摄像头是大势所趋。太阳能供电相对市电供电的供电量不足,因此采用太阳能供电的摄像头只能采用定时抓拍模式。
2、定时抓拍相对实时监控在单位时间内获取的停车位图像张数大幅度减少,因此由于摄像头晃动,导致识别结果不准确的情况,定时抓拍相对实时监控影响大(停车位图像足够多的情况下,识别结果影响很小),其中影响包括但不限于停车位图像中停车位与实际不符以及车辆在不同图像中位置不同。
3、由于无法像人一样通过停车位图像直接判断摄像头是否晃动过,因此为了消除晃动对停车位图像的影响,需要对停车位图像进行处理,使得无论是否晃动,处理后的停车位图像都不影响识别结果:未晃动,经过处理之后无影响;有晃动,经过处理之后仍不影响识别结果。
技术实现思路
1、本技术实施例提供了一种图像校正方法、系统、计算机设备及存储介质,以解决晃动对停车位图像识别的影响。
2、为实现上述目的,本技术采用的一种技术方案是:
3、一种图像校正方法,其特征在于:
4、它包括:
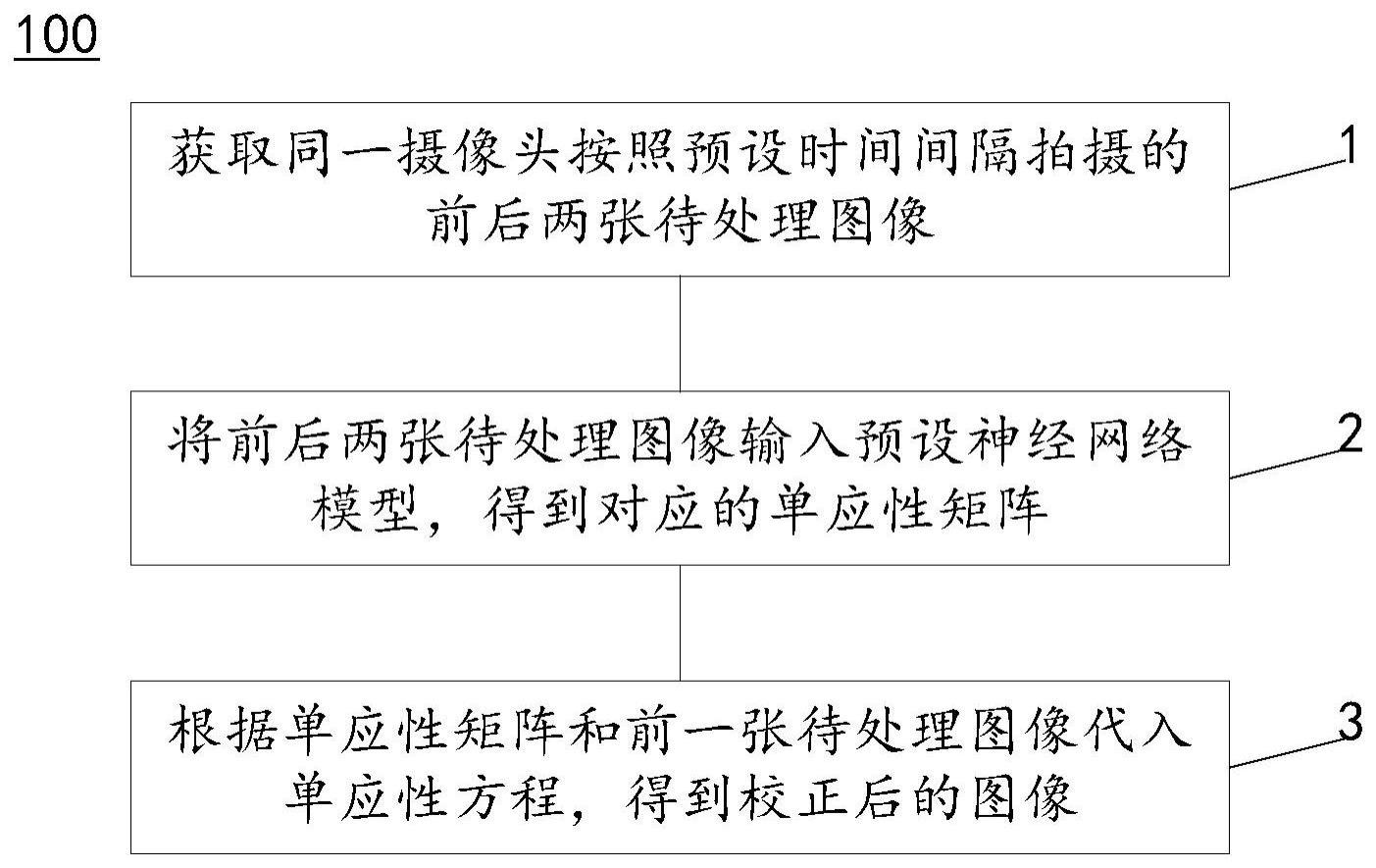
5、获取同一摄像头按照预设时间间隔拍摄的前后两张待处理图像;
6、将所述前后两张待处理图像输入预设神经网络模型,得到对应的单应性矩阵;
7、其中,所述预设神经网络模型的训练方法,包括:
8、步骤21、获取同一摄像头按照预设时间间隔拍摄的前后两张待处理图像;
9、步骤22、将所述前后两张待处理图像输入所述预设神经网络模型,得到第一单应性矩阵;
10、步骤23、采用所述前后两张待处理图像中的任意一张待处理图像,结合所述第一单应性矩阵,得到对应单应性变换后的图像;
11、步骤24、判断所述单应性变换后的图像和未经过单应性变换的图像中每一像素对应是否变化,得到各自未变化像素区域形成的图像;
12、步骤25、计算两个所述未变化像素区域形成的图像误差;
13、步骤26、判断误差值是否在预设预定范围之内;
14、步骤27、若是,则确定第一单应性矩阵为对应的预设神经网络模型的单应性矩阵,完成预设神经网络模型训练;
15、步骤28、若否,则重复步骤21-27,直到误差值在预设预定范围内,确定第一单应性矩阵为对应的预设神经网络模型的单应性矩阵,完成预设神经网络模型训练;
16、根据所述单应性矩阵和所述前一张待处理图像代入单应性方程,得到校正后的图像,从而有效解决因摄像头晃动带来的识别结果受影响。
17、所述所述预设神经网络模型的训练方法,还包括:
18、步骤28、若所述误差不在预设阈值范围内,则重复所述步骤21-27,直到所述误差在所述预设阈值范围内,完成预设神经网络模型训练。
19、一种图像校正系统,其特征在于:
20、它包括:
21、获取单元,用于获取同一摄像头按照预设时间间隔拍摄的前后两张待处理图像;
22、输入单元,用于将前后两张待处理图像输入预设神经网络模型,得到对应的单应性矩阵;
23、校正单元,用于根据单应性矩阵和前一张待处理图像代入单应性方程,得到校正后的图像,从而有效解决因摄像头晃动带来的识别结果受影响。
24、所述输入单元,包括:
25、获取模块,用于获取同一摄像头按照预设时间间隔拍摄的前后两张待处理图像;
26、输入模块,用于将前后两张待处理图像输入预设神经网络模型,得到第一单应性矩阵;
27、结合模块,用于采用前后两张待处理图像中的任意一张待处理图像,结合第一单应性矩阵,得到对应单应性变换后的图像;
28、判断模块,用于判断所述单应性变换后的图像和未经过单应性变换的图像中每一像素对应是否变化,得到各自未变化像素区域形成的图像;
29、计算模块,用于计算两个所述未变化像素区域形成的图像误差;
30、确定模块,用于确定误差是否在预设阈值范围内;
31、处理模块,用于当误差在预设阈值范围内,则确定第一单应性矩阵为预设神经网络模型的单应性矩阵,完成预设神经网络模型训练;
32、所述处理模块,还用于当误差不在预设阈值范围内,则重复所述获取模块到所述确定模块,直到误差在预设阈值范围内,完成预设神经网络模型训练。
33、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行所述的图像校正方法,它包括:
34、获取同一摄像头按照预设时间间隔拍摄的前后两张待处理图像;
35、将所述前后两张待处理图像输入预设神经网络模型,得到对应的单应性矩阵;
36、其中,所述预设神经网络模型的训练方法,包括:
37、步骤21、获取同一摄像头按照预设时间间隔拍摄的前后两张待处理图像;
38、步骤22、将所述前后两张待处理图像输入所述预设神经网络模型,得到第一单应性矩阵;
39、步骤23、采用所述前后两张待处理图像中的任意一张待处理图像,结合所述第一单应性矩阵,得到对应单应性变换后的图像;
40、步骤24、判断所述单应性变换后的图像和未经过单应性变换的图像中每一像素对应是否变化,得到各自未变化像素区域形成的图像;
41、步骤25、计算两个所述未变化像素区域形成的图像误差;
42、步骤26、判断误差值是否在预设预定范围之内;
43、步骤27、若是,则确定第一单应性矩阵为对应的预设神经网络模型的单应性矩阵,完成预设神经网络模型训练;
44、步骤28、若否,则重复步骤21-27,直到误差值在预设预定范围内,确定第一单应性矩阵为对应的预设神经网络模型的单应性矩阵,完成预设神经网络模型训练;
45、根据所述单应性矩阵和所述前一张待处理图像代入单应性方程,得到校正后的图像,从而有效解决因摄像头晃动带来的识别结果受影响。
46、一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行所述的图像校正方法,它包括:
47、获取同一摄像头按照预设时间间隔拍摄的前后两张待处理图像;
48、将所述前后两张待处理图像输入预设神经网络模型,得到对应的单应性矩阵;
49、其中,所述预设神经网络模型的训练方法,包括:
50、步骤21、获取同一摄像头按照预设时间间隔拍摄的前后两张待处理图像;
51、步骤22、将所述前后两张待处理图像输入所述预设神经网络模型,得到第一单应性矩阵;
52、步骤23、采用所述前后两张待处理图像中的任意一张待处理图像,结合所述第一单应性矩阵,得到对应单应性变换后的图像;
53、步骤24、判断所述单应性变换后的图像和未经过单应性变换的图像中每一像素对应是否变化,得到各自未变化像素区域形成的图像;
54、步骤25、计算两个所述未变化像素区域形成的图像误差;
55、步骤26、判断误差值是否在预设预定范围之内;
56、步骤27、若是,则确定第一单应性矩阵为对应的预设神经网络模型的单应性矩阵,完成预设神经网络模型训练;
57、步骤28、若否,则重复步骤21-27,直到误差值在预设预定范围内,确定第一单应性矩阵为对应的预设神经网络模型的单应性矩阵,完成预设神经网络模型训练;
58、根据所述单应性矩阵和所述前一张待处理图像代入单应性方程,得到校正后的图像,从而有效解决因摄像头晃动带来的识别结果受影响。
59、本技术实施例提供的一种图像校正方法的有益效果在于:本技术实施例首先针对一张待处理图像进行初步的单应性矩阵校正,之后再采用将校正之后的图像和未校正的图像,针对未发生变化的像素形成的区域计算误差,缩小图像比对的范围,在训练预设神经网络模型的时候,减少训练数据量,降低训练成本。最后通过预设神经网络模型得到的单应性矩阵,将无论是否晃动的图像经过校正,有效解决由于摄像头晃动而带来的识别结果不准确问题。
- 还没有人留言评论。精彩留言会获得点赞!