一种无水尺水位识别方法、终端设备及存储介质与流程
本发明涉及水位检测领域,具体涉及一种无水尺水位识别方法、终端设备及存储介质。
背景技术:
1、近年来,水利信息化建设持续推进,水位监测在生态流量,防洪预警等方面发挥重要作用。传统的水位监测方法利用声学法、雷达、红外线等原理的各类装置来识别水位,其存在抗干扰能力普遍较差,自动化程度低,运维成本高等问题。
2、现有的水位监测方法普遍采用基于水尺的图像处理,通常先使用目标检测算法检测水尺位置,然后使用图像处理算法进一步获取水尺数值,但是,随着水位的变化,被水体淹没的水尺表面会粘附泥沙、水藻等污渍,导致水位降低时水尺上的刻度被遮挡,影响水位监测的精确度,且水尺长时间与水面接触容易损坏导致维护成本上升,另外,该方法不适用于未配有水尺的观测站点。
3、申请号为201911349545.2的中国发明专利申请公开了一种基于视频的无水尺水位读数方法,包括人工标定,工作人员使用激光仪在水位线到岸之间进行激光打点,将所打激光散点的位置在视频图像上画点标记;以当前水位线处所打的激光散点为基准点,在视频图像中以基准点为中心,左右外扩视频图像,得到虚拟水尺的边界;将虚拟水尺从视频图像中抠出,使用深度学习模型进行水位线区域检测,获得水位线区域;对水位线进行回归,将得到的水位线区域从视频图像中抠出,使用深度学习回归模型进行回归,计算水位线读数。但是该方法需要人工确定标记点,操作繁琐,效率较低,同时人工测量误差大,易受干扰;对水位线进行回归时,需要通过激光散点的坐标信息,对图像整体进行回归计算,当某个坐标点信息出现错误时,直接影响水位识别的准确性,抗干扰性弱,识别精度低;且该方法虚拟水尺的构建过于依赖激光散点,当摄像头角度因外界因素产生偏移时,采集到的视频图像发生变化,最初设定的基准点在图像中的位置也会产生偏移,甚至可能偏移至镜头外,导致无法准确识别摄像头偏移后视频中的水域和河岸,因此该方法必须要求摄像头位置是固定的,当摄像头受外界因素影响产生了一定位移时,会导致基准偏移,进而导致水位读数偏差较大,无法正确地对水位进行监测。
技术实现思路
1、本发明的目的在于,针对上述现有技术的不足,提供一种无水尺水位识别方法;本发明的目的还在于,提供一种无水尺水位识别方法的终端设备;本发明的另一目的还在于,提供一种能在计算机上执行上述方法的存储介质;以适用于有摄像头移动的场景,以及无水尺的观测站点,提高水位识别的准确性。
2、为解决上述技术问题,本发明所采用的技术方案是:
3、一种无水尺水位识别方法,其特征在于,包括以下步骤:
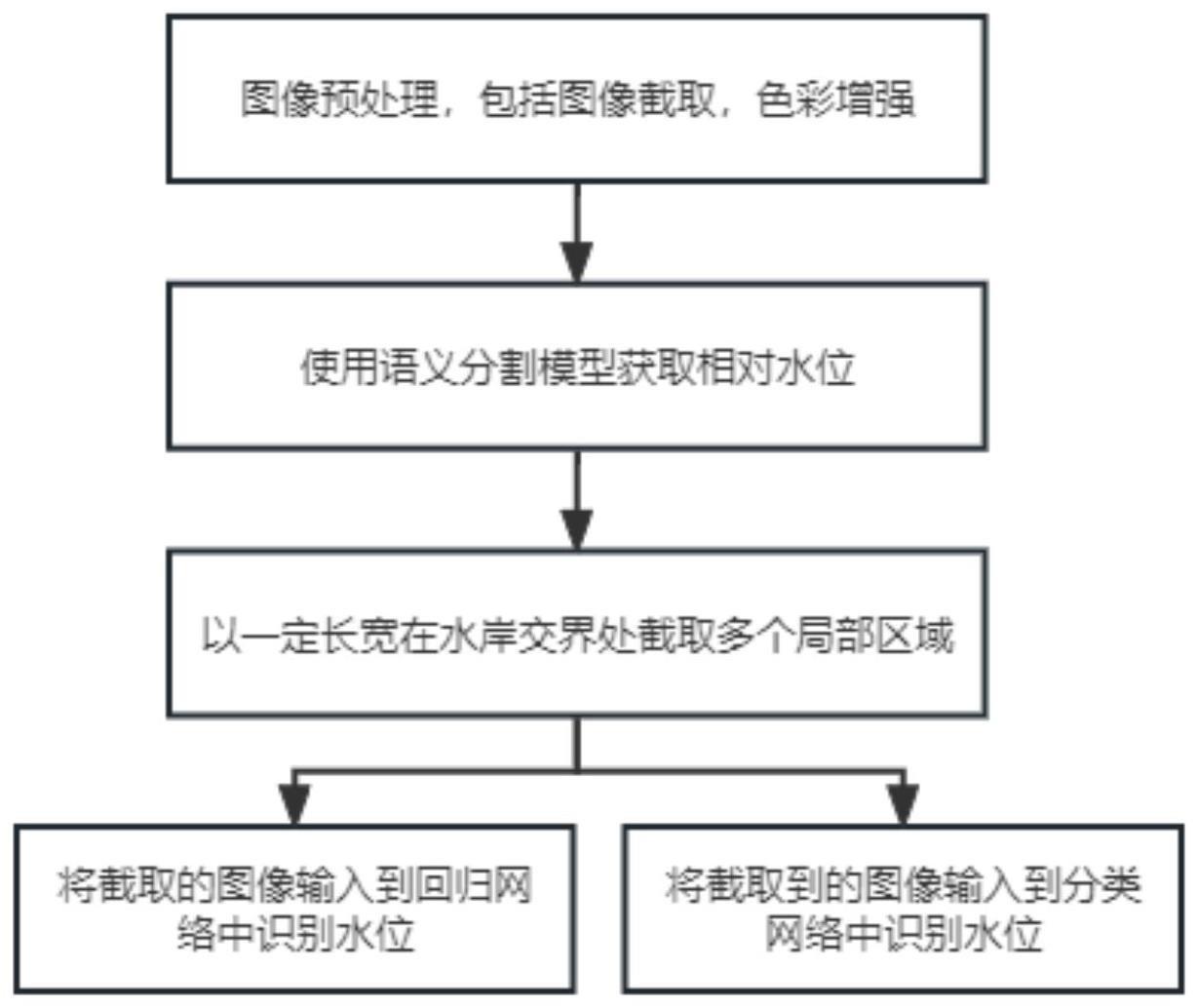
4、s1、获取河道图像输入训练好的语义分割模型,识别图像中的水岸分界线,所述训练好的语义分割模型的训练过程包括,对训练样本河道图片的水域与河岸背景进行标注,再将标注好的训练样本图片输入语义分割模型进行训练;
5、s2、选取水岸分界线作为水位线,截取m个局部区域图像,所述局部区域图像包括水位线;
6、s3、提取单个局部区域图像的图像特征(h,w),沿宽度w方向划分为n份,得到每一子份的特征维度为h,对每一子份的高度h进行水位识别,得到y1,y2,...,yn共n个绝对水位值,得到单个局部区域绝对水位值h=[(y1+y2+...+yn)-(ymax+ymin)]/(n-2),其中,ymax=max(y1,y2,...,yn),ymin=min(y1,y2,...,yn);
7、s4、获取m个局部区域图像的绝对水位值h1,h2,...,hm共m个绝对水位值,计算所述视频图像绝对水位值h′=[(h1+h2+...+hm)]/m。
8、进一步,步骤s2中提取单个局部区域图像的图像特征(h,w)的具体实现过程包括,将局部区域图像输入backbone网络,得到图像特征(c,h,w),使用1*1的卷积核将c维度大小映射为1,得到图像特征(1,h,w),再将c通道进行压缩得到图像特征(h,w)。
9、优选地,所述backbone网络为轻量型backbone,所述轻量型backbone包括三个block,所述三个block结构相同,所述block包括2个卷积层,1个池化层,2个batchnormalization层,1个relu层。
10、backbone网络一般采用常用的特征提取网络vgg和resnet,但是由于vgg和resnet参数量更大,层数更多,训练更慢,同时对特征高度h方向有平均池化处理,不利于后续水位数值回归;本发明采用轻量型backbone可在保持准确率的同时减少计算量,提高图像的特征提取处理效率。
11、优选地,步骤s2中对每一子份的高度h进行水位识别的具体实现方法包括,使用线性映射层,将沿宽度w方向的每一子份特征h映射到一个水位数值,具体表示为yi=whi,则沿宽度w方向共n份特征,得到y1,y2,...,yn共n个绝对水位值;
12、其中,yi为第i份特征检测的绝对水位值,w为可训练的线性映射层参数,用于将特征映射到1个水位值,hi表示沿宽度w方向的第i份特征。
13、传统的对水位线进行回归计算的方法,通常依赖于激光散点的坐标信息,针对图像整体进行计算;本发明将一个整体拆分为若干份,对单个局部图像区域的绝对水位值进行回归计算,可以测定总体各单位分布的集中趋势,能够有效排除干扰因子,防止计算数据波动幅度过大,影响水位识别的准确性;面对大量数据进行回归计算时,本发明实现简单,处理速度快,模型输出结果更清晰直观,在图像识别上的灵活度和准确度更好,对异常数据具有相当的鲁棒性和可扩展性,抗噪声干扰能力强,识别精度高,能够极大地提高水位识别的准确性。
14、优选地,步骤s2中对每一子份的高度h进行水位识别的具体实现方法包括,使用线性映射的方式,将每一子份沿宽度w方向的特征h映射到k个二分类子任务,具体表示为pij=softmax(wjhi),如果pij>0.5,则当前子任务的当前水位高于对应的临界水位,将当前子任务分类为1;统计k个二分类子任务中分类为1的个数,记为s,得到沿宽度w方向的第i个区域的绝对水位值yi=rmin+s*(rmax-rmin)/k,则沿宽度w方向共n份特征,得到y1,y2,...,yn共n个绝对水位值;
15、其中,所述k个二分类子任务的具体实现方法包括,将rmax-rmin均匀地划分为k-1个区间,得到k个水位临界值r1,r2,...rk;所述每一子份设定k个二分类子任务,每个子任务的特征维度均为h,k个子任务对应的临界水位分别为r1,r2,...,rk,每个子任务判断当前水位是否高于对应的临界水位值,若当前子任务的当前水位高于对应的临界水位,则将当前子任务分类为1,若当前子任务的当前水位低于对应的临界水位,将当前子任务分类为0;其中,rmin为水位最低值,rmax为水位最大值;
16、其中,pij表示沿宽度w方向的第i份特征在第j个二分类子任务上分类为1的概率值,wj为可训练的线性映射层,表示将特征映射到第j个二分类子任务上,hi表示沿宽度w方向的第i份特征。
17、传统的对水位线进行回归计算的方法,通常依赖于激光散点的坐标信息,针对图像整体进行计算;本发明将一个整体拆分为若干份,采用二分类的方法对单个局部图像区域的绝对水位值进行计算,可以测定总体各单位分布的集中趋势,能够有效排除干扰因子,防止计算数据波动幅度过大,影响水位识别的准确性;面对大量数据进行分类时,实现简单,处理速度快,模型输出结果更清晰直观,在图像识别上的灵活度和准确度更好,对异常数据具有相当的鲁棒性和可扩展性,抗噪声干扰能力强,识别精度高,能够极大地提高水位识别的准确性。
18、作为一个发明构思,本发明还提供了一种终端设备,包括:
19、一个或多个处理器;
20、存储器,其上存储有一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现本发明上述方法的步骤。
21、一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现本发明上述方法的步骤。
22、与现有技术相比,本发明所具有的有益效果为:
23、(1)通过摄像头获取河道图像数据,进而识别水位,无需安装水尺及标志物,即可有效检测水位,具有非接触式的特点,能够适应各种条件下的水位自动监测,普适性高;
24、(2)传统的水位图像识别需要调整视频基准点,构建虚拟水尺后,再进行水位线区域检测,本发明提取大量已标注的样本图像特征,对语义分割模型进行训练,在多次迭代中,语义分割模型对特征分布不断拟合学习,得到满足预期精度的水域分割模型;将待检测视频图像输入训练好的语义分割模型后,当摄像头偏移后,机器仍然能通过学习过的样本图片,识别出视频图像中的水域区域,无需重新标记视频基准点以构建虚拟水尺,即可自动识别多个图像中的水域区域,实现自动对焦水面位置功能,适用于有摄像头移动的场景。
25、(3)截取多个局部图像区域,分别计算单个局部图像区域的绝对水位值,将一个整体拆分为若干份进行绝对水位值计算,可以测定总体各单位分布的集中趋势,有效排除干扰因子,防止计算数据波动幅度过大,影响水位识别的准确性,鲁棒性强,同时使用人工智能算法模型,采用数值回归或二分类的方法,将相对水位转换为绝对水位,面对大量数据进行分类时,本发明实现简单,处理速度快,在图像识别上的灵活度和准确度更好,识别精度更高,能够极大地提高水位识别的准确性。
- 还没有人留言评论。精彩留言会获得点赞!