基于目标识别的无人机劣化绝缘子检测方法及系统与流程
本发明涉及输电线路,具体为基于目标识别的无人机劣化绝缘子检测方法及系统。
背景技术:
1、在电力输配电系统中,绝缘子作为重要的绝缘控件,负责保障电能的传输和分配安全。然而,由于其长期暴露在自然环境中,如连续的高温、湿度和紫外线照射,绝缘子表面易受到破损和腐蚀,最终导致劣化。劣化绝缘子容易引发电气事故,从而影响电网运行的安全和稳定,也会导致维护和更换成本的增加。
2、因此,实时检测绝缘子的状态,及时发现和处理劣化绝缘子现象,成为电网智能化巡检所必须面对的任务之一。然而,人工巡检的效率往往并不能确保在面对广泛的输电线路时能够高效地定位和处理绝缘子故障,面对这一挑战,电网运维人员可以采用无人值守飞行器(如无人机)等工具,通过实时检测绝缘子状态,依据不同区域情况采取定制化的防治措施,提高绝缘子故障的处理效率和准确性,更好地保障线路稳定运行和电网安全。
3、所以,如何设计基于目标识别的无人机劣化绝缘子检测方法及系统,成为我们当前需要解决的问题。
技术实现思路
1、针对现有技术的不足,本发明提供了基于目标识别的无人机劣化绝缘子检测方法及系统,解决了人工巡检绝缘子故障效率较低且定位不准确的问题。
2、为实现上述目的,本发明提供如下技术方案:基于目标识别的无人机劣化绝缘子检测方法,包括以下步骤:
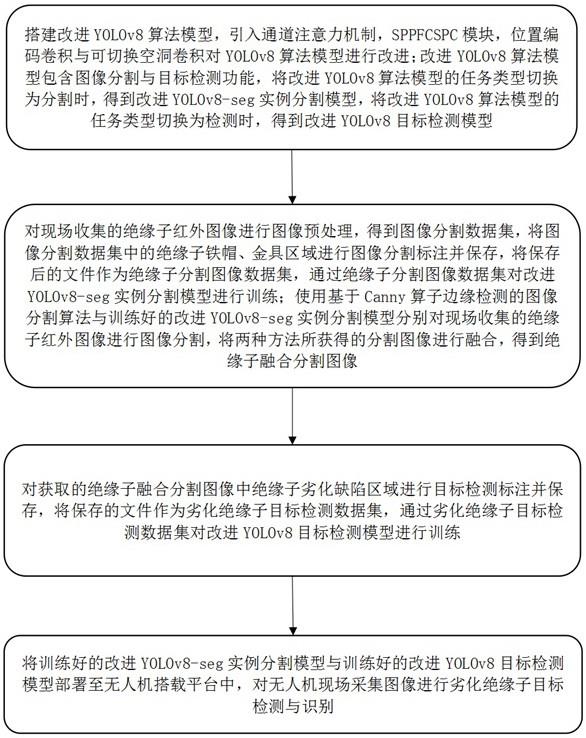
3、s1:搭建改进yolov8算法模型,引入通道注意力机制,sppfcspc模块,位置编码卷积与可切换空洞卷积对yolov8算法模型进行改进;改进yolov8算法模型包含图像分割与目标检测功能,将改进yolov8算法模型的任务类型切换为分割时,得到改进yolov8-seg实例分割模型,将改进yolov8算法模型的任务类型切换为检测时,得到改进yolov8目标检测模型;
4、所述改进yolov8算法模型由主干特征提取网络、特征融合网络和检测头三部分组成,主干特征提取网络依次由第一ccbs卷积模块、第二ccbs卷积模块、第一c2f-eca模块、第三ccbs卷积模块、第二c2f-eca模块、第四ccbs卷积模块、第三c2f-eca模块、第五ccbs卷积模块、第四c2f-eca模块构成;特征融合网络分为特征图尺寸增大路径和特征图尺寸减小路径,特征图尺寸增大路径依次经过上采样模块、堆叠模块、第五c2f-eca模块、上采样模块、堆叠模块与第六c2f-eca模块,特征图尺寸减小路径依次经过第一scbs卷积模块、堆叠模块、第七c2f-eca模块、第二scbs卷积模块、堆叠模块与第八c2f-eca模块;
5、s2:对现场收集的绝缘子红外图像进行图像预处理,得到图像分割数据集,将图像分割数据集中的绝缘子铁帽、金具区域进行图像分割标注并保存,将保存后的文件作为绝缘子分割图像数据集,通过绝缘子分割图像数据集对改进yolov8-seg实例分割模型进行训练;使用基于canny算子边缘检测的图像分割算法与训练好的改进yolov8-seg实例分割模型分别对现场收集的绝缘子红外图像进行图像分割,将两种方法所获得的分割图像进行融合,得到绝缘子融合分割图像;
6、s3:对步骤s2中获取的绝缘子融合分割图像中绝缘子劣化缺陷区域进行目标检测标注并保存,将保存的文件作为劣化绝缘子目标检测数据集,通过劣化绝缘子目标检测数据集对改进yolov8目标检测模型进行训练;
7、s4:将训练好的改进yolov8-seg实例分割模型与训练好的改进yolov8目标检测模型部署至无人机搭载平台中,对无人机现场采集图像进行劣化绝缘子目标检测与识别。
8、进一步的,主干特征提取网络中的第一c2f-eca模块、第二c2f-eca模块、第三c2f-eca模块与第四c2f-eca模块均采用有残差连接的瓶颈模块(bottleneck),其中第一c2f-eca模块与第四c2f-eca模块结构相同,瓶颈模块(bottleneck)数量为1,第二c2f-eca模块与第三c2f-eca模块结构相同,瓶颈模块(bottleneck)数量为2;特征融合网络中的第五c2f-eca模块、第六c2f-eca模块、第七c2f-eca模块与第八c2f-eca模块结构相同,均采用无残差连接的瓶颈模块(bottleneck),瓶颈模块(bottleneck)数量为1。
9、进一步的,第一ccbs卷积模块、第二ccbs卷积模块、第三ccbs卷积模块、第四ccbs卷积模块和第五ccbs卷积模块结构相同,均由位置编码卷积、标准化模块和silu激活函数组成。
10、进一步的,第一scbs卷积模块与第二scbs卷积模块结构相同,均由可切换空洞卷积、标准化模块和silu激活函数组成。
11、进一步的,从主干特征提取网络的第二c2f-eca模块、第三c2f-eca模块与第四c2f-eca模块上分别引出第一特征层、第二特征层与第三特征层,输入到特征融合网络中进行特征融合后得到第十特征层、第十三特征层和第十六特征层,将第十特征层、第十三特征层和第十六特征层分别输入到检测头中进行检测识别。
12、进一步的,从主干特征提取网络中引出的第一特征层、第二特征层与第三特征层,输入到特征融合网络中进行特征融合的具体过程为:第三特征层经过eca注意力机制与sppfcspc模块后得到第四特征层,第四特征层经过上采样模块后得到第五特征层,第二特征层经过eca注意力机制后与第五特征层在堆叠模块中进行特征融合后得到第六特征层,第六特征层经过第五c2f-eca模块后得到第七特征层,第七特征层上采样模块得到第八特征层,第一特征层经过eca注意力机制后与第八特征层在堆叠模块中进行特征融合后得到第九特征层,第九特征层经过第六c2f-eca模块后得到第十特征层,第十特征层经过第一scbs卷积模块后得到第十一特征层,第七特征层与第十一特征层在堆叠模块中进行特征融合后得到第十二特征层,第十二特征层经过第七c2f-eca模块后得到第十三特征层,第十三特征层经过第二scbs卷积模块后得到第十四特征层,第十四特征层与第四特征层在堆叠模块中进行特征融合后得到第十五特征层,第十五特征层经过第八c2f-eca模块后得到第十六特征层。
13、进一步的,所述图像预处理是指通过翻转、旋转几何变换进行绝缘子红外图像扩增;对扩增后的绝缘子红外图像进行直方图均衡化和自适应中值滤波器去除椒盐噪声处理。
14、基于目标识别的无人机劣化绝缘子检测系统,包括:搭建模块,用于搭建改进yolov8算法模型,引入通道注意力机制,sppfcspc模块,位置编码卷积与可切换空洞卷积对yolov8算法模型进行改进;改进yolov8算法模型包含图像分割与目标检测功能,将改进yolov8算法模型的任务类型切换为分割时,得到改进yolov8-seg实例分割模型,将改进yolov8算法模型的任务类型切换为检测时,得到改进yolov8目标检测模型;所述改进yolov8算法模型由主干特征提取网络、特征融合网络和检测头三部分组成,主干特征提取网络依次由第一ccbs卷积模块、第二ccbs卷积模块、第一c2f-eca模块、第三ccbs卷积模块、第二c2f-eca模块、第四ccbs卷积模块、第三c2f-eca模块、第五ccbs卷积模块、第四c2f-eca模块构成;特征融合网络分为特征图尺寸增大路径和特征图尺寸减小路径,特征图尺寸增大路径依次经过上采样模块、堆叠模块、第五c2f-eca模块、上采样模块、堆叠模块与第六c2f-eca模块,特征图尺寸减小路径依次经过第一scbs卷积模块、堆叠模块、第七c2f-eca模块、第二scbs卷积模块、堆叠模块与第八c2f-eca模块;融合分割模块,用于对现场收集的绝缘子红外图像进行图像预处理,得到图像分割数据集,将图像分割数据集中的绝缘子铁帽、金具区域进行图像分割标注并保存,将保存后的文件作为绝缘子分割图像数据集,通过绝缘子分割图像数据集对改进yolov8-seg实例分割模型进行训练;使用基于canny算子边缘检测的图像分割算法与训练好的改进yolov8-seg实例分割模型分别对现场收集的绝缘子红外图像进行图像分割,将两种方法所获得的分割图像进行融合,得到绝缘子融合分割图像;训练模块,用于对获取的绝缘子融合分割图像中绝缘子劣化缺陷区域进行目标检测标注并保存,将保存的文件作为劣化绝缘子目标检测数据集,通过劣化绝缘子目标检测数据集对改进yolov8目标检测模型进行训练;部署模块,用于将训练好的改进yolov8-seg实例分割模型与训练好的改进yolov8目标检测模型部署至无人机搭载平台中,对无人机现场采集图像进行劣化绝缘子目标检测与识别。
15、一种非易失性计算机存储介质,计算机存储介质存储有计算机可执行指令,该计算机可执行指令执行所述基于目标识别的无人机劣化绝缘子检测方法。
16、一种电子设备,包括:至少一个处理器,以及与所述至少一个处理器通信连接的存储器,其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器执行所述基于目标识别的无人机劣化绝缘子检测方法。
17、与现有的技术相比,本发明具备以下有益效果:本发明通过采用图像处理技术和算法,可以实现对瓷绝缘子的实时检测和及时报警,并提高检测的速度、准确性和可靠性,通过部署用于无人机劣化绝缘子检测的改进yolov8算法模型,能够很好地处理劣化绝缘子的检测,提高检测准确率,此外,本发明提出的瓷绝缘子劣化检测方法具有结构简洁、易于实现等优点,应用前景广泛。
- 还没有人留言评论。精彩留言会获得点赞!