一种基于机器视觉的魔芋凝胶测控方法与流程
本发明涉及图像处理,具体涉及一种基于机器视觉的魔芋凝胶测控方法。
背景技术:
1、在魔芋精粉处理过程中,需要对魔芋精粉进行浸泡处理,然后进行加热搅拌,直到达到凝胶状态。在搅拌过程中,需要有经验的工作人员,观察搅拌过程中魔芋精粉形成的胶体的状态,从而控制电机的转速,在絮团较多时快速搅拌,在絮团较少时缓慢搅拌,将魔芋精粉搅拌均匀,形成凝胶状态。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种基于机器视觉的魔芋凝胶测控方法解决了现有需要工作人员观察魔芋精粉搅拌过程的凝胶状态,从而控制电机进行搅拌,存在工作效率低,且搅拌效果因人而异的问题。
2、为了达到上述发明目的,本发明采用的技术方案为:一种基于机器视觉的魔芋凝胶测控方法,包括以下步骤:
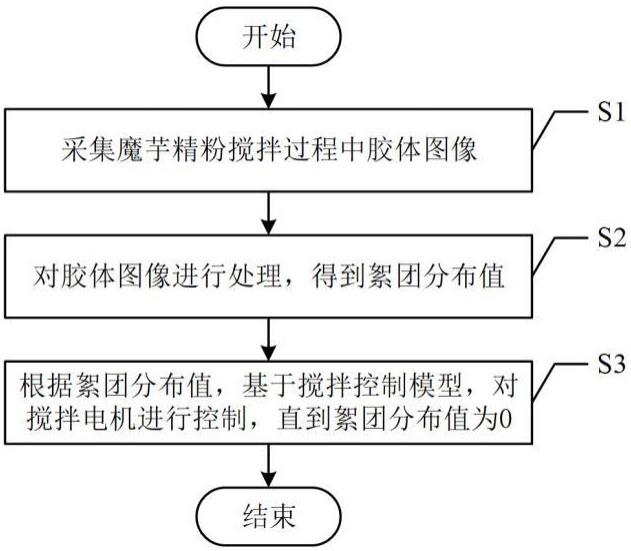
3、s1、采集魔芋精粉搅拌过程中胶体图像;
4、s2、对胶体图像进行处理,得到絮团分布值;
5、s3、根据絮团分布值,基于搅拌控制模型,对搅拌电机进行控制,直到絮团分布值为0。
6、进一步地,所述s2包括以下分步骤:
7、s21、对胶体图像进行平滑处理,得到平滑图像;
8、s22、对平滑图像进行分区处理,得到絮团区域;
9、s23、根据絮团区域,计算絮团分布值。
10、上述进一步地方案的有益效果为:本发明中先对胶体图像进行平滑处理,避免异常值影响s22中的分区,从平滑图像中找到絮团区域,再进行量化处理,得到絮团分布值。
11、进一步地,所述s21中平滑处理的公式为:
12、,
13、,
14、其中,为平滑处理后像素点的像素值,为像素差值,为待平滑处理像素点的像素值,为像素点的像素值的邻近范围内第个像素点的像素值,为第一差值阈值,为第二差值阈值。
15、上述进一步地方案的有益效果为:本发明设置了第一差值阈值和第二差值阈值,在像素差值大于第一差值阈值时,则待平滑处理像素点的像素值异常程度较大,因此,取周围8个像素点的像素值的均值替换待平滑处理像素点的像素值;在像素差值小于第一差值阈值大于第二差值阈值时,则待平滑处理像素点的像素值有可能为异常值、噪点或者絮团与胶体的分界点,因此,本发明中在像素差值越大时,取较多均值部分,像素差值越小时,取较多待平滑处理像素点的像素值,在保留分界特征的同时,并进行去噪处理;在像素差值小于第二差值阈值时,则无需平滑处理,待平滑处理像素点的像素值与周边像素值相差不大。
16、进一步地,所述s22包括以下分步骤:
17、s221、在平滑图像上随机选取一像素点,作为对比点;
18、s222、计算其他像素点与对比点的相似度;
19、s223、将相似度高于相似度阈值的像素点归为一类,低于相似度阈值的像素点归为另一类;
20、s224、分别计算两类像素点与凝胶像素点像素值的距离;
21、s225、取两个距离中较大者对应的一类像素点构成的区域作为絮团区域。
22、上述进一步地方案的有益效果为:平滑处理后,异常点被去除,平滑图像包括两类像素点,胶体像素点和絮团像素点,任取一像素点作为对比点,计算其他像素点与对比点的相似度,根据相似度,将像素点分为两类,根据每类像素点与凝胶像素点像素值的距离,距离凝胶像素点像素值较大的一类为絮团区域,另一类与凝胶像素点像素值较近,相似度较高,因此,其属于已经搅拌均匀的区域。
23、进一步地,所述s23包括以下分步骤:
24、s231、去除絮团区域中离散像素点,得到各絮团子区;
25、s232、根据各絮团子区的面积和像素值的分布情况,计算絮团分布值。
26、上述进一步地方案的有益效果为:在搅拌过程中,絮团并非一个,而是分散在胶体中,去除絮团区域中离散像素点,从而可得到各个分散的絮团子区,根据各絮团子区的面积和像素值的分布情况,计算絮团分布值。
27、进一步地,所述s232中计算絮团分布值的公式为:
28、,
29、其中,为絮团分布值,为絮团子区的数量,为第个絮团子区的面积,为平滑图像的面积,为第个絮团子区的像素值均值,为凝胶像素点像素值。
30、上述进一步地方案的有益效果为:本发明将每个絮团子区的面积与平滑图像面积的占比作为权重,在絮团子区的像素值均值与凝胶像素点像素值相差越大时,每个絮团子区的面积越大时,絮团分布值越大,搅拌过程中大量的魔芋精粉还未成为胶体。
31、进一步地,所述s3中搅拌控制模型的表达式为:
32、,
33、其中,为第时刻搅拌控制模型输出的控制量,为第一权重系数,为第二权重系数,为第时刻的絮团分布值,为第时刻的絮团分布值,为偏置系数。
34、上述进一步地方案的有益效果为:本发明设置,使得控制量根据絮团分布值的增长而增长,可快速响应变化,再设置,获知相邻时刻的絮团分布值的走向,从而减少超调和震荡,提高系统稳定性。
35、进一步地,所述搅拌控制模型中第一权重系数、第二权重系数和偏置系数的获取方法包括以下步骤:
36、a1、对第一权重系数、第二权重系数和偏置系数设置初值;
37、a2、采用当前的搅拌控制模型对搅拌电机进行控制,得到絮团分布值为0时的工作时间和耗电量;
38、a3、根据工作时间和耗电量,计算目标值;
39、a4、判断目标值是否低于目标阈值,若是,则当前的第一权重系数、第二权重系数和偏置系数为所需值,若否,则跳转至步骤a5;
40、a5、对第一权重系数、第二权重系数和偏置系数进行交叉和变异处理,并跳转至步骤a2。
41、进一步地,所述a3中目标值的公式为:
42、,
43、其中,为目标值,为得到絮团分布值为0时的实际耗电量,为目标耗电量,为得到絮团分布值为0时的实际工作时间,为目标工作时间。
44、上述进一步地方案的有益效果为:本发明先对权重和偏置设置初值,在初值情况下,搅拌控制模型对搅拌电机进行控制,达到絮团分布值为0即完成搅拌时,综合搅拌时间和耗电量,建立目标函数,计算目标值,找到使得目标值小于目标阈值的工作时间和耗电量对应的权重和偏置为所需系数,在目标值大于目标阈值,通过交叉和变异对权重和偏置进行更新,得到新的权重和偏置,再去判断目标值是否小于目标阈值,通过不断的交叉和变异对权重和偏置进行更新,直到找到目标值小于目标阈值的权重和偏置。
45、进一步地,所述a5中交叉公式为:
46、,
47、变异公式为:
48、,
49、其中,为当前的交叉概率,为交叉概率初值,为交叉概率最大值,为目标值,为当前的变异概率,为变异概率最大值,为变异概率初值,为对数函数,为自然常数。
50、上述进一步地方案的有益效果为:本发明中目标值越大时,交叉概率和变异概率越大,便于快速交叉和变异,找到合适权重和偏置,本发明采用对数函数和指数函数实现对目标值的放大,使得交叉公式和变异公式对目标值的变化敏感。
51、综上,本发明的有益效果为:本发明采集魔芋精粉搅拌过程中形成的胶体图像,根据胶体图像中絮团的分布情况,得到絮团分布值,再根据絮团分布值,基于搅拌控制模型,对电机进行自动控制,直到絮团分布值为0,电机停止搅拌,魔芋精粉搅拌完成,本发明中通过采集搅拌过程的图像,进行图像处理,从而得到当前的搅拌程度,并基于当前的搅拌程度,自动控制电机,从而实现一种全自动搅拌过程,无需人工监督,且能实现一致性的搅拌效果。
- 还没有人留言评论。精彩留言会获得点赞!