一种车位上车辆驶出状态误判的检测方法及装置与流程
本发明涉及图像处理、智慧停车、车位检测,特别涉及一种车位上车辆驶出状态误判的检测方法及装置。
背景技术:
1、随着经济的快速发展,车辆数量与日俱增,停车难问题日益突出。车位检测方法可以有效的解决车位资源有限的问题,提高停车场车位的使用率。
2、现有的基于计算机视觉的车位上车辆状态检测方法,针对并列的垂直多车位,如果出现非垂直车辆停靠遮挡住垂直多车位上的车辆的情况,会出现垂直多车位上的车辆被误判为驶出状态,从而造成该车位状态误报。
3、综上所述,目前迫切需要提出一种解决上述问题的车位上车辆驶出状态误判的检测方法。
技术实现思路
1、有鉴于此,本发明的主要目的在于提供一种车位上车辆驶出状态误判的检测方法,能够实现精度和速度并重。
2、为达到上述目的,按照本发明的第一个方面,提供了一种车位上车辆驶出状态误判的检测方法,该方法包括:
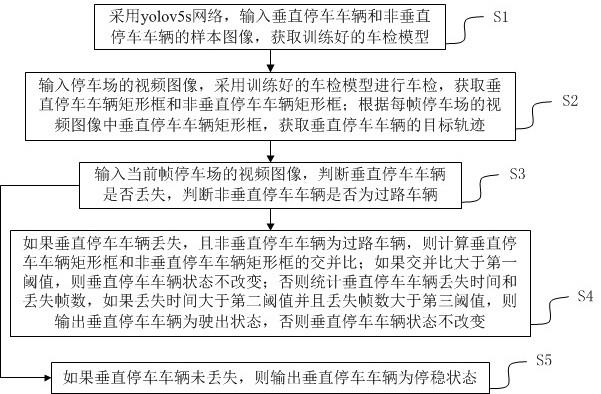
3、第一步骤,采用yolov5s网络,输入垂直停车车辆和非垂直停车车辆的样本图像,获取训练好的车检模型;
4、第二步骤,输入停车场的视频图像,采用训练好的车检模型进行车检,获取垂直停车车辆矩形框和非垂直停车车辆矩形框;根据每帧停车场的视频图像中垂直停车车辆矩形框,获取垂直停车车辆的目标轨迹;
5、第三步骤,输入当前帧停车场的视频图像,判断垂直停车车辆是否丢失,判断非垂直停车车辆是否为过路车辆;
6、第四步骤,如果垂直停车车辆丢失,且非垂直停车车辆为过路车辆,则计算垂直停车车辆矩形框和非垂直停车车辆矩形框的交并比;如果交并比大于第一阈值,则垂直停车车辆状态不改变;否则统计垂直停车车辆丢失时间和丢失帧数,如果丢失时间大于第二阈值并且丢失帧数大于第三阈值,则输出垂直停车车辆为驶出状态,否则垂直停车车辆状态不改变;
7、第五步骤,如果垂直停车车辆未丢失,则输出垂直停车车辆为停稳状态。
8、进一步地,所述第一步骤包括:采用yolov5s网络,网络输入尺度为448*256,输出为2类,一类是垂直停车车辆,一类是非垂直停车车辆;在yolov5s网络,输入垂直停车车辆和非垂直停车车辆的样本图像进行训练,直至收敛,得到训练好的车检模型。
9、进一步地,所述第三步骤包括:
10、当前帧视频图像输入步骤,输入当前帧停车场的视频图像;
11、垂直停车车辆丢失判断步骤,如果未检测到垂直停车车辆矩形框,但垂直停车车辆的目标轨迹存在,则认为垂直停车车辆丢失;
12、过路车辆判断步骤,获取非垂直停车车辆矩形框的宽度w、下边界坐标yd、左边界坐标xl、右边界坐标xr;如果同时满足条件以下3个条件:(1)非垂直停车车辆矩形框的宽度w>λ1*img_width;(2)非垂直停车车辆矩形框的下边界坐标yd>λ2*img_height;(3)非垂直停车车辆矩形框的左边界坐标xl<λ3*img_width或者非垂直停车车辆矩形框的右边界坐标xr>λ4*img_width,则认为非垂直停车车辆是过路车辆;其中,所述img_width、img_height分别表示停车场的视频图像的宽度和高度。
13、其中,所述λ1、λ2、λ3、λ4分别表示第一比例阈值、第二比例阈值、第三比例阈值、第四比例阈值。
14、进一步地,所述第四步骤包括:
15、过路车辆响应步骤,如果垂直停车车辆丢失,并且非垂直停车车辆为过路车辆,则转入交并比计算和车辆状态判断步骤;如果垂直停车车辆丢失,非垂直停车车辆不是过路车辆,则转入车辆丢失统计和车辆状态判断步骤;
16、交并比计算和车辆状态判断步骤,计算垂直停车车辆矩形框和非垂直停车车辆矩形框的交并比;如果交并比大于第一阈值,则认为垂直停车车辆被过路车辆遮挡,标记垂直停车车辆被遮挡,垂直停车车辆状态不改变,否则转入车辆丢失统计和车辆状态判断步骤;
17、车辆丢失统计和车辆状态判断步骤,统计垂直停车车辆丢失时间和丢失帧数,如果丢失时间大于第二阈值并且丢失帧数大于第三阈值,则输出垂直停车车辆为驶出状态,否则垂直停车车辆状态不改变。
18、按照本发明的另一个方面,提供了一种车位上车辆驶出状态误判的检测装置,该装置包括:
19、车检模型训练模块,用于采用yolov5s网络,输入垂直停车车辆和非垂直停车车辆的样本图像,获取训练好的车检模型;
20、垂直停车车辆和非垂直停车车辆获取模块,用于输入停车场的视频图像,采用训练好的车检模型进行车检,获取垂直停车车辆矩形框和非垂直停车车辆矩形框;根据每帧停车场的视频图像中垂直停车车辆矩形框,获取垂直停车车辆的目标轨迹;
21、车辆丢失和过路车辆判断模块,用于输入当前帧停车场的视频图像,判断垂直停车车辆是否丢失,判断非垂直停车车辆是否为过路车辆;
22、车辆丢失时车辆状态判断模块,用于如果垂直停车车辆丢失,且非垂直停车车辆为过路车辆,则计算垂直停车车辆矩形框和非垂直停车车辆矩形框的交并比;如果交并比大于第一阈值,则垂直停车车辆状态不改变;否则统计垂直停车车辆丢失时间和丢失帧数,如果丢失时间大于第二阈值并且丢失帧数大于第三阈值,则输出垂直停车车辆为驶出状态,否则垂直停车车辆状态不改变;
23、车辆未丢失时车辆状态判断模块,用于如果垂直停车车辆未丢失,则输出垂直停车车辆为停稳状态。
24、进一步地,所述车检模型训练模块包括:用于采用yolov5s网络,网络输入尺度为448*256,输出为2类,一类是垂直停车车辆,一类是非垂直停车车辆;在yolov5s网络,输入垂直停车车辆和非垂直停车车辆的样本图像进行训练,直至收敛,得到训练好的车检模型。
25、进一步地,所述车辆丢失和过路车辆判断模块包括:
26、当前帧视频图像输入模块,用于输入当前帧停车场的视频图像;
27、垂直停车车辆丢失判断模块,用于如果未检测到垂直停车车辆矩形框,但垂直停车车辆的目标轨迹存在,则认为垂直停车车辆丢失;
28、过路车辆判断模块,用于获取非垂直停车车辆矩形框的宽度w、下边界坐标yd、左边界坐标xl、右边界坐标xr;如果同时满足条件以下3个条件:(1)非垂直停车车辆矩形框的宽度w>λ1*img_width;(2)非垂直停车车辆矩形框的下边界坐标yd>λ2*img_height;(3)非垂直停车车辆矩形框的左边界坐标xl<λ3*img_width或者非垂直停车车辆矩形框的右边界坐标xr>λ4*img_width,则认为非垂直停车车辆是过路车辆;其中,所述img_width、img_height分别表示停车场的视频图像的宽度和高度。
29、其中,所述λ1、λ2、λ3、λ4分别表示第一比例阈值、第二比例阈值、第三比例阈值、第四比例阈值。
30、进一步地,所述车辆丢失时车辆状态判断模块包括:
31、过路车辆响应模块,用于如果垂直停车车辆丢失,并且非垂直停车车辆为过路车辆,则转入交并比计算和车辆状态判断模块;如果垂直停车车辆丢失,非垂直停车车辆不是过路车辆,则转入车辆丢失统计和车辆状态判断模块;
32、交并比计算和车辆状态判断模块,用于计算垂直停车车辆矩形框和非垂直停车车辆矩形框的交并比;如果交并比大于第一阈值,则认为垂直停车车辆被过路车辆遮挡,标记垂直停车车辆被遮挡,垂直停车车辆状态不改变,否则转入车辆丢失统计和车辆状态判断模块;
33、车辆丢失统计和车辆状态判断模块,用于统计垂直停车车辆丢失时间和丢失帧数,如果丢失时间大于第二阈值并且丢失帧数大于第三阈值,则输出垂直停车车辆为驶出状态,否则垂直停车车辆状态不改变。
34、与现有的车辆状态检测技术相比,本发明的一种车位上车辆驶出状态误判的检测方法的优点在于:可以有效地检测出由于非垂直车辆停靠遮挡,而造成的车位上车辆驶出状态误判的情况。
- 还没有人留言评论。精彩留言会获得点赞!